
Fターム[3D232DD17]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | フィードバック制御 (1,615)
Fターム[3D232DD17]に分類される特許
1,601 - 1,615 / 1,615
車両の操舵装置
【課題】 運転者による操舵ハンドルの操作に対して、運転者が見込んだ運動状態量を正確に発生させて車両を運転し易しくする。
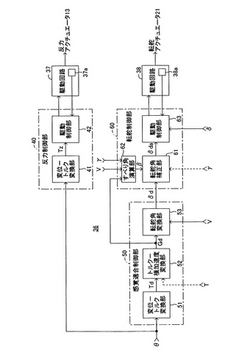
【解決手段】 車両の操舵装置において、コンピュータプログラム処理により前輪が転舵制御される。変位−トルク変換部51は操舵角θを指数関係にある操舵トルクTdに変換する。トルク−横加速度変換部52は操舵トルクTdに基づいて見込み横加速度Gdに変換する。転舵角変換部55は目標転舵角δdを計算する。転舵角補正部61は横滑り角演算部62から車両に発生している横滑りの横滑り角βを取得する。そして、転舵角補正部61は取得した横滑り角βに基づいて目標転舵角δdを補正して補正目標転舵角δdaを計算する。駆動制御部63は、転舵輪を目標転舵角δdに転舵制御する。これにより、運転者は正確に発生した見込み横加速度Gdを知覚できるため車両の運転をし易くなる。
(もっと読む)
電動ステアリング装置

【課題】 電動パワーステアリング装置の操舵フィーリングを確保しながら、イナーシャ補償やダンパー補償を不要にしてモータの制御系を簡素化する。
【解決手段】 ステアリングハンドルから車輪までの操舵系にトルクを付与するモータMを駆動することで、操舵トルクセンサSaで検出した操舵トルクTsから目標トルク算出手段M1が算出した目標トルクTtを、モータMを介して操舵系に発生させて車輪を転舵する。その際に、モータMを介して操舵系に実際に作用する実トルクTaを実トルクセンサSbで検出し、実トルクTaが目標トルクTtに一致するようにモータ電流算出手段M2およびPID制御手段M3でモータMをトルクフィードバック制御するので、モータMの実電流を目標電流に一致させる従来の電流フィードバック制御で必要であったイナーシャ補償やダンパー補償が不要になり、制御系の構造を簡素化しながら操舵フィーリングを向上させることができる。
(もっと読む)
操舵トルクを決定する方法
本発明は、自動車のハンドル用の操舵トルクを決定することを可能にする方法に関する。かじ取り角が、操舵された車輪について、ハンドルを用いて運転者によって予め規定される。車軸に対する力を表す操舵トルクが、ハンドルに作用する。本発明によれば、手動トルク(M_soll)が、少なくとも1つの軸モデルを用いて決定される。次いで、手動トルクは、操舵トルク(M_ist)に重ね合わされる。  (もっと読む)
(もっと読む)
車両のレーン走行支援装置
【課題】 走行中の車両に対し横風等の外乱が加えられた場合にも、操舵制御装置による車両のレーン走行支援を円滑に行なう。
【解決手段】 操舵制御手段(電動パワーステアリングシステム)と、走行レーン検出手段(カメラ等)を備え、走行レーン検出手段の検出結果と車両の操舵状態及び走行状態に応じて、走行レーン内における車両の状態量を推定演算し、目標状態量との比較結果に応じて操舵制御を行ない車両の走行レーン内の走行を支援する。特に、車両のステアリングモデルに基づき車両に対する外乱量を推定演算し、この外乱量に基づき目標状態量と推定状態量の比較結果を修正し、この修正結果に応じて操舵制御を修正する。
(もっと読む)
車両用操舵装置
【課題】 転舵用アクチュエーターの小容量化を図り、装置故障時の応急的な操舵を可能にする。
【解決手段】 運転者が操舵を行う操作手段5の運転者による操作力を舵取り機構18へ伝達する変形可能なワイヤー手段19と、操作手段5と舵取り機構18との間に設けられて操作手段5と舵取り機構18との連結と切り離しを行う軸断続手段7とを備え、軸切り離し時には舵角検出値が操作角検出値に応じた目標舵角となるように転舵駆動手段(ステアリングラック18a内に設置)を制御し、軸連結した後は操作手段5による運転者の操作力を舵取り機構18を駆動する駆動力に用いて舵取り機構18を駆動する。
(もっと読む)
車両用内輪空転防止制御装置
【課題】 フィードバック制御に伴う過渡応答や振動等を発生させることなく、旋回内輪空転を未然に防ぐことができる車両用内輪空転防止制御装置を提供する。
【解決手段】 ブレーキペダルの操作とは独立して各車輪のブレーキ液圧を可変するブレーキアクチュエータ6と、ステアリングギア比を可変する前輪操舵アクチュエータ5と、を備えた車両用内輪空転防止制御装置において、内輪が空転するかどうかを予測する内輪空転判断手段と、内輪が空転すると判断されたとき、ブレーキアクチュエータ7に対し、各車輪のブレーキ圧を増大させるブレーキ液圧指令値を出力するとともに、前輪操舵アクチュエータ5に対し、ステアリングギア比をより大きくするギア比可変指令値を出力する内輪空転防止制御手段と、を設けた。
(もっと読む)
電動パワーステアリング装置の制御装置
本発明は、モータに対し弱め界磁制御を実行したときや、モータ循環電流に基づくトルクリップルによって引起こされるモータ振動、騒音を抑制する電動パワーステアリング装置の制御装置を提供する。そのため、弱め界磁制御を実行したときに発生するトルクリップル又はモータ循環電流に基づくトルクリップルを抑制できる基本の補正電流とロータ位置との関係を予め実測し、その基本の補正電流に弱め界磁電流の大きさ、ロータの角速度の大きさ、或いは循環電流の電気角を考慮して調整した補正電流を本来の電流指令値に加算してモータの出力トルクを制御する。 (もっと読む)
操舵可能な後輪のロックの制御方法及びシステム並びに対応する車両
本発明は、少なくとも3つの操舵可能な車輪を有する車両1のための、操舵可能な後輪5のロックの制御方法及び制御システム10並びに対応する車両1に関する。上記の制御システム10は、操舵可能な後輪5のロックセットポイントを表示するために、漸近擾乱排除モジュールと、ダイナミックフィードバックモジュールと、車両の動的応答の監視モジュールと、上記の各モジュールを選択的に活性化するための選択的活性化手段とを含む。
 (もっと読む)
(もっと読む)
電動パワーステアリング装置
車両のハンドル戻しの状態において発生するモータ電流とPWM信号のデューテイ比の関係に生ずる不連続非線形特性を線形化し、ノイズの発生を
抑え、円滑な操舵感覚が得られる電動パワーステアリング装置である。電動パワーステアリング装置の電子制御回路13は、操舵補助指令値演算器22Aにつながる電流制御器22Bから出力されるVrefを電流駆動線形化補償器23で演算してVref2を算出し、補償加算器25で処理してデューテイD1を得、またVref2を電流不連続補償器23で処理してデューテイD2を得る。モータ駆動回路35のHブリッジ回路の上段FET1をデューテイD1で駆動し、上段FET1と対となる下段FET3をデューテイD2で駆動する。これによりモータ電流対PWM信号デューテイ比特性を連続線形化することができる。
(もっと読む)
車両を安定化させる際に車両操作者を支援するための方法及び装置
この発明は、目標操舵角と瞬間的な操舵角の間の偏差に応じて決まる追加操舵トルクを車両の操舵系統に加える形で、車両の操舵可能な車輪の目標操舵角を調節して、車両を安定化させる際に車両操作者を支援する方法に関する。この方法は、車両の操舵系統に作用する負荷モーメントの値を見積もることと、この負荷モーメントに関する見積値に応じて、追加操舵トルクを算出することとを特徴とする。更に、この発明は、この方法を実施するのに適した装置に関する。  (もっと読む)
(もっと読む)
車両を安定化させる際に車両操作者を支援するための方法及び装置
この発明は、車両を安定化させる際に、車両の操舵系統に追加操舵トルクを加えて、車両操作者を支援する方法に関する。この方法は、車両の操舵可能な車輪における瞬間的な操舵角と目標操舵角の間の操舵角偏差に応じて、追加操舵トルクの第一の成分を求め、その場合に、車両のヨーレイトの瞬間的な値と基準ヨーレイトの値の間の偏差に応じて、この操舵角偏差を求めるとともに、車両モデルにおける運転者が設定する少なくとも一つの変量の値に応じて、この基準ヨーレイトの値を計算することを特徴とする。更に、この発明は、この方法を実施するのに適した装置に関する。  (もっと読む)
(もっと読む)
電動パワーステアリング装置
電動モータの回転位置情報とその電動モータの目標電流値とを用いて、当該モータを流れる電流の所定の高次成分に起因するトルクリップルを打ち消すための電流高次成分用の補償値を決定する電流高次歪み補償部と、この電流高次歪み補償部からの補償値を用いて、上記目標電流値を補正する補正部とを設ける。そして、フィードバック制御部が、補正部によって補正された後の目標電流値に基づいて、電動モータをフィードバック制御する。これにより、電流高次成分に起因するトルクリップルを抑えることができ、よって操舵フィーリングの低下を抑制することができる。  (もっと読む)
(もっと読む)
駐車操作中に運転者を支援するための方法
本発明は、例えば、駐車操作又は位置決め操作のような運転操作中に車両(10)の運転者を支援するための方法に関する。前記方法によれば、車両(10)を移動させるための基準軌道(16)が決定される。基準軌道(16)に沿って車両を案内するために適用すべきハンドル位置は、運転操作中に運転者に指示される。運転者が適用する実際のかじ取り角と、要求されたハンドル位置に対応する目標かじ取り角との間のかじ取り角偏差は、運転者とは独立して補正される。  (もっと読む)
(もっと読む)
重畳ステアリング装置を備えた車両のステアリング方法
重畳ステアリングシステムを備えた車両のステアリング方法であって、ドライバーによって与えられるステアリング角及び追加の角度(付加ステアリング角)を算出するとともに、その結果として得られるステアリング角を設定するために、この与えられたステアリング角に対して、重畳アクチュエーターを用いて、特に電動モーターを用いて、かつ重畳伝動装置を介して、別の値、特に走行動特性に関する値に応じて、この付加ステアリング角を重畳することが可能である方法において、このステアリングシステムの結果として得られるステアリング角にもとづき、並びにこの付加ステアリング角に直接的に依存する、或いはこの付加ステアリング角を表す値にもとづき、この重畳伝動装置の伝動装置入力角
【数1】
(53)に関する値を算出することを特徴とする方法。  (もっと読む)
(もっと読む)
チルト調節装置及び車両のチルトを調節する方法
本発明は、車両(10)のロール角速度を示す信号(κ’)を検出すると共に、設定舵取り角信号(δLset)を検出する検出手段と、前記ロール角速度信号(κ’)及び設定舵取り角信号(δLset)に基づいて舵取り信号(δL)を発生する調節手段(21,29,30)とを備え、加えて、車両(10)の少なくとも一つの軸の一つ以上の車輪(11)の舵取りを行うために、舵取りアクチュエータ(15)に舵取り信号(δL)を出力する出力手段(31)を備える車両(10)用のチルト調節装置(16)に関する。本発明によれば、チルト調節装置(16)は、車両(10)が少なくとも一時的にシングルトラック走行モードに保持されるように、舵取り信号(δL)によって舵取りアクチュエータ(15)を制御する。 (もっと読む)
1,601 - 1,615 / 1,615
[ Back to top ]