
Fターム[3D301EA34]の内容
Fターム[3D301EA34]に分類される特許
1 - 20 / 99
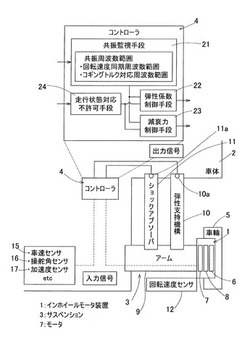
インホイールモータ車両用サスペンションシステム
【課題】 インホイールモータ車両に特有の振動を解消したインホイールモータ車両用サスペンションシステムを提供する。
【解決手段】 インホイールモータ装置1と車体2との間に介在したサスペンション3に、弾性支持機構10およびショックアブソーバ11を有する。弾性支持機構10は弾性係数の変更が可能であり、ショックアブソーバ11は減衰力の変更が可能である。モータ7の回転速度が、定められた共振周波数範囲に入るか否かを監視する共振監視手段21を設ける。共振周波数範囲にモータ7の回転数が入ると判定された場合に、弾性支持機構10に弾性係数を変更させる弾性係数制御手段22、およびショックアブソーバ11の減衰力を変更させる減衰力制御手段23を設ける。
(もっと読む)
車両のロール角推定方法及び装置

【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を求めることが可能な方法及び装置の提供。
【解決手段】左右サスペンションの任意の時点において測定された変位及び内圧値から、ロール角と左右サスペンションによるロールモーメントとをそれぞれ算出し、左右サスペンションの測定内圧平均値に対応する荷重−変位特性を、自動車高調整が行われなかった場合の左右サスペンションに共通の荷重−変位特性として選択し、算出したロール角及びロールモーメントと、選択した荷重−変位特性と、サスペンションを装着した車両固有の値として変位及び内圧値の測定前に記憶されたロール剛性係数とに基づき、自動車高調整が行われなかった場合のロール角を求める。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】左右サスペンションの何れか一方の荷重−変位特性(バネ特性)が線形近似可能な範囲ではない場合、更新禁止状態であると判定し、更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置
【課題】サスペンションの変動状態や積荷の状態変化に因らず、自動車高調整非実行時のロール角を精度良く求めることが可能な方法及び装置の提供。
【解決手段】異なる2つの時点での変位及び内圧値(第1及び第2の変位と第1及び第2の内圧値)を用いて車高調整非実行時のロール角φ2esを求める第1の方法と、1つの時点での変位及び内圧値(第2の変位と第2の内圧値)と、変位及び内圧値の測定前に記憶された所定のロール剛性係数Kφ13newとを用いて車高調整非実行時のロール角φ2esを求める第2の方法とを、サスペンションの変動状態や積荷の状態変化に応じて適宜選択して用いる。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車両
【課題】車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵指令情報に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
(もっと読む)
キャンバ制御装置
【課題】燃費を十分に良くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪にキャンバを付与するためのキャンバ可変機構と、車両に振動が発生しているかどうかを判断する振動発生判断処理手段と、車両に振動が発生していると判断された場合に、所定の車輪にキャンバを付与するキャンバ付与処理手段とを有する。車両に振動が発生していると判断された場合に、所定の車輪の各タイヤに、互いに対向する方向にキャンバスラストが発生させられるので、車両を十分に安定させて走行させることができる。燃費を十分に良くすることができる。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させる際に、アンダーステア特性を得やすくする。
【解決手段】前輪における左右の輪荷重移動量が、後輪における左右の輪荷重移動量よりも大きくなるように、前側駆動モータ3f及び後側駆動モータ3rを駆動制御する。具体的には、前側駆動モータ3fに対するフロント回転角制御量、及び後側駆動モータ3rに対するリア回転角制御量を算出する際、フロント回転角制御量よりもリア回転角制御量を大きくすると共に、リア回転角制御量の応答時間をフロント回転角制御量の応答時間よりも遅くする。又は、前側駆動モータ3fに対するフロント回転角制御量、及び後側駆動モータ3rに対するリア回転角制御量を算出する際、フロント回転角制御量よりもリア回転角制御量を大きくすると共に、フロント回転角制御量の応答時間をリア回転角制御量の応答時間よりも早くする。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】輪荷重の変動を抑制しつつ、操舵応答性の向上およびロール挙動の抑制を可能とする。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、当該変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し、合計値を基にドライバ要求トルクを補正する。
(もっと読む)
車両用制御装置
【課題】アクチュエータを小型・軽量化できる車両用制御装置を提供すること。
【解決手段】走行速度取得手段S61により車両1の走行速度が取得され、その走行速度取得手段により取得される車両1の走行速度Vが小さいほど、駆動速度調整手段により、キャンバ角調整手段S67により駆動されるアクチュエータの駆動速度が小さくされる。ここで、車両1の走行速度Vが小さくなるにつれアクチュエータの負荷が大きくなる傾向があるが、走行速度Vが小さいほどアクチュエータの駆動速度が小さくされることで、車両1の走行速度Vが小さいときにアクチュエータの負荷が大きくなることを抑制できる。その結果、走行速度Vが小さいときの負荷を考慮してアクチュエータを大型化する必要がなくなるため、アクチュエータを小型・軽量化できる。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、乗員が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、加速操作部材の操作量に基づいて走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。走行制御処理手段は、共振の状態を判定する共振発生状態判定処理手段及び共振の状態に応じて、走行用の駆動部における駆動力の発生を抑制する駆動力抑制処理手段を備える。
(もっと読む)
車両
【課題】傾斜制御を精度良く行うことができるようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行制御用の制御値を発生させる走行制御処理手段と、走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両に許容範囲を超えて発生する傾斜状態を判定する傾斜状態判定処理手段、及び傾斜状態に応じて駆動力の発生を抑制する駆動力抑制処理手段を備える。車両に許容範囲を超えて発生する傾斜状態が判定され、判定された傾斜状態に応じて、走行用の駆動部における駆動力の発生が抑制されるので、車両が許容範囲を超えて傾斜させられることがなくなる。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、運転者が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行用の駆動部を駆動するための走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両の前後方向における重心の移動量を算出し、最大角加速度を算出し、最大角加速度に基づいて前記傾斜制御用の制御値の変動を制限する制御値制限処理手段を備える。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、横加速度を検出するセンサと、ヨー角速度検出手段と、車速検出手段と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、横加速度に基づくフィードバック制御を行うとともに、ヨー角速度の微分値及び車速からリンク角速度予測値を算出し、算出したリンク角速度予測値を使用したフィードフォワード制御を行って車体の傾斜を制御する。
(もっと読む)
サスペンション装置
【課題】 液圧ダンパ装置40のストッパ当たりの発生頻度が低減されたサスペンション装置を提供すること。
【解決手段】 サスペンション本体10に追従上限周波数を越える周波数の振動が入力されたときに、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡がるように電動アクチュエータ30が伸縮作動する。このため追従上限周波数よりも大きな周波数の振動によって液圧ダンパ装置40が電動アクチュエータ30に対して移動した場合でも、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡げられているので液圧ダンパ装置40がバウンドストッパ47に当たり難くなる。よって、ストッパ当たりの発生頻度が減少し、ストッパ当たりの発生による乗り心地の悪化が抑えられるとともに、バウンドストッパ47の耐久性も向上する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の調整に伴って生じる車両の挙動特性の変化に基づく違和感を、運転者等に与えることのない車両用制御装置を提供する。
【解決手段】車両用制御装置100は、安定キャンバ付与基準データ72B等に規定された条件を満たす場合、キャンバ角調整装置44を制御し、左後輪2RL及び右後輪2RRのキャンバ角を調整する。又、車両用制御装置100は、旋回判定基準データ72Cの基準値と、加速度センサ装置80等の検出値を比較することで、車両1が旋回中であるか否かを判定する。車両1が旋回中である場合、車両用制御装置100は、安定キャンバ付与基準データ72Bに係る条件を満たしていても、キャンバ角調整装置44によるキャンバ角の調整を禁止する。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
1 - 20 / 99
[ Back to top ]