
Fターム[4C097TB08]の内容
補綴 (46,288) | 義肢の動作;調節;操作 (438) | 緩衝機構 (46) | 流体圧を用いたもの (16)
Fターム[4C097TB08]に分類される特許
1 - 16 / 16
上腕保持装置、及び、上腕補助装置
【課題】利用者の前腕部分、及び、手部分の動きの関連づけを実現することの可能な上腕保持装置、及び、上腕補助装置を提供する。
【解決手段】肘下椀部40と連結された内側連結部41には、連結紐88を介してグローブ90連結されている。連結紐88は、非伸縮性で且つ変形自在の材料で構成されている。グローブ90は、連結紐88が変形することにより、内側連結部41と相対移動可能となっている。
(もっと読む)
義指装置

【課題】 物品を確実に把持することが可能な義指装置を安価に提供する。
【解決手段】 指骨格12を第1アクチュエータ71で屈曲・伸長し、指骨格12を覆う袋体52〜55内部に粉体を充填し、指骨格12の屈曲後に袋体52〜55の内部を第2アクチュエータ73で真空引きして固化するので、袋体52〜55が固化していない状態で指骨格12を屈曲させて義指を物品の表面に当接させ、柔軟な袋体52〜55の形状を物品の形状に沿うように馴染ませた後に袋体52〜55を固化することで、特別に強い把持力を必要とせずに物品を確実に把持することができる。しかも第1アクチュエータ71は指骨格を屈曲・伸長させることが可能であれば、センサ等を用いて義指の把持力や屈曲量を制御する等の複雑な制御を行う必要はなく、また第2アクチュエータ72は袋体52〜55の内部を真空引できるものであれば良いため、極めて低価格で実現することができる。
(もっと読む)
装着式動作補助装置
【課題】本発明は駆動部の駆動力を動作補助手袋に効率良く伝達することを課題とする。
【解決手段】装着式動作補助装置10は、装着者の指に装着される動作補助手袋20からなり、通常の動作補助手袋と同様に装着される。動作補助手袋20には、被駆動部30と、駆動部40と、線状部材50と、生体信号検出部60と、制御ユニット70とが設けられている。動作補助手袋20は、装着者の手に密着するように手のサイズに合わせた立体的な形状に形成されている。動作補助手袋20の手甲側には、複数の線状部材50が各指の延在方向に沿うように配されている。複数の線状部材50が、伸展方向または屈曲方向に動作すると共に、動作補助手袋20の各指も線状部材50と一体に伸展方向または屈曲方向に動作する。
(もっと読む)
大腿切断患者用自動義足
切断患者の大腿連結部(100)に適用される大腿義足(P)であって、患者の大腿連結部に連結される上部ヒンジ(1)、膝の動きを再現する機能を有する関節軸(2)、大腿部に駆動可能に連結する脛骨・ふくらはぎ筋肉装置(3)およびふくらはぎ筋肉の機能をいくらか再現し、義足がブレーキをかけ、歩行の典型的な連続したスイングとスタンス段階を可能にするダンパ(5)とを備える。ダンパはシリンダ(5c)を備え、ピストン(10)およびステム(9)が互いに連結作用して、義足にかかる力に対応して、該ダンパの減衰反応をもたらす。特に、力変換器はダンパ、特にステムに設ける。マイクロプロセッサは変換器から力信号を受信し、検出された力信号に応じてダンパの反応を調整する手段を作動させる。  (もっと読む)
(もっと読む)
密封要素用組込式固定装置を備えた切断肢端収納スリーブ
切断肢端収納スリーブ内部の遠位区域を切断肢端およびその周囲大気に対して密封することによって切断肢端を固定するための組込式固定装置を備えた切断肢端収納スリーブ(1)において、収納スリーブ内部に前記装置の機能要素(3)が組み込まれており、該要素に対して内部へ到達する密封要素(5)を可逆的、形状結合的、かつ空気が背面流動できないように取り付けることができる。 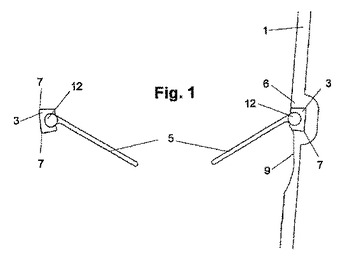 (もっと読む)
(もっと読む)
保形バッグならびにこれを用いた補装具および身体採型具
【課題】バッグや粒子等の素材を用途に合わせて適宜選択でき、使用者への身体的および経済的負担を軽減することが可能で、汎用性が高い保形バッグならびにこれを用いた補装具および身体採型具を提供する。
【解決手段】気密性および弾性を有するバッグの内部に保形用粒子が充填されてなり、前記内部を陰圧に保持することにより、前記バッグの形状が保持されるようにしたことを特徴とする、保形バッグならびにこれを用いた補装具および身体採型具である。
(もっと読む)
動作支援装置
【課題】使用者の動作支援を行う場合に、使用者の望む方向および力で安全に動作支援することができる。
【解決手段】使用者の一方の手に装着可能で指部12と中手部13を有する手袋状の装着部材11と、装着部材11の手背側に指部の先端と中手部との間に懸架される伸縮自在な手背側アクチュエータ5と、装着部材の手掌側に指部の先端と中手部との間に懸架される伸縮自在な手掌側アクチュエータ6とを備え、手掌側アクチュエータ6は、指部の先端手背側から指部両側部28を通って前記指部の手掌側に配置され、指部の各関節相当位置での間隔が異なるように前記指部12に沿って中手部13まで配置された2つのワイヤーで構成されたワイヤー部21と、前記ワイヤー部21と連結し前記中手部に設けられたゴム人工筋19とを備える。
(もっと読む)
補装具関節または矯正器関節
【課題】旋回運動の適切な制動を容易な方法で達成することができる補装具関節または矯正器関節を提供すること。
【解決手段】旋回ピストン(6)と押しのけ室(5)の壁部との間には、流れ横断面を規定する少なくとも1つの輪郭区域が形成されており、この輪郭区域は、選択された旋回角度に亘って、連通流路(9)および押しのけ室(5)と流体力学的に連通しており、旋回ピストン(6)の角度位置に従って、流体の流出のための異なった自由な流れ横断面を供給する。
(もっと読む)
義足
【課題】スムーズな平地歩行及び坂道や階段の下り歩行を可能にした義足を提供する。
【解決手段】膝継手部9の屈曲伸展の抵抗を調整する液圧シリンダー7が装備された義足1において、膝継手部9の下方の下腿部4と足部5との間に、足部5のつま先接地と踵接地とでそれぞれ逆向きの可動変位する緩衝装置6を設け、液圧シリンダー7に伸展通路73、屈曲通路74、屈曲通路74につま先接地閉弁76を設け、屈曲通路74Aに踵接地閉弁77を設け、つま先接地閉弁76と踵接地閉弁77とを互いに弁の開閉向きを逆向きに閉弁連結作動部材78で連動連結し、義足の足部のつま先接地と踵接地による緩衝装置6の可動変位を検知して可動変位する接地検知部材79を設け、接地検知部材79の可動変位を閉弁連結作動部材78に伝達して可動変位させる接地伝達部材78bを設けた。
(もっと読む)
人工足首継手機構
セルフアライメント足・足首人工装具アセンブリは、足部材(10)を回転可能に取り付けた足首ユニット(16)を有する。足首ユニットは、シリンダ(26)内を直線移動可能なピストン(28)を有する油圧ピストン・シリンダアセンブリを含む。シリンダの軸は、足首ユニットの脛部接続インタフェース(20)により画定される脛軸と一致している。制動抵抗制御弁を含む迂回路(36)により足首継手の背底屈が連続的に油圧制動され、上記ユニットは制動運動範囲の大部分にわたり足背方向と足底方向のいずれにも弾性付勢されない。これにより、立位安定化、バランス制御、階段および傾斜歩行の改善などの利点が得られる。 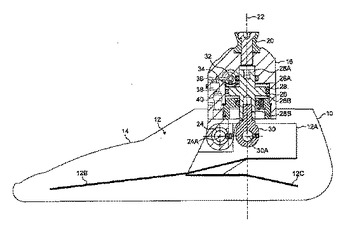 (もっと読む)
(もっと読む)
義手および力伝達手段
本発明は、本体(2)を有する義手(1)であって、この本体には、少なくとも1本の義指(3,4,5)が関節式に取り付けられており、この義指は、力伝達手段(10)を介して義指(3,4,5)に結合されている駆動装置(6)によって、少なくとも1つの回動軸(15)を中心として可動であってなる義手に関する。力伝達手段(10)は、駆動装置と義指(3,4,5)との間で、引っ張り強くおよび圧力弾性的に、特に曲げ弾性的に形成されている。 (もっと読む)
義足
【課題】義足のつま先接地で義足の膝折れをロックして防ぎ、義足の踵接地で義足の膝屈曲抵抗を高めて膝屈曲をゆっくり行わせるようにし、つま先接地にあっては膝曲げ動作を連続して続けている場合にはロックされることなく曲がるようしてスムーズな平地歩行及び坂道や階段の下り歩行を可能にした。
【解決手段】膝継手部8の下方の下腿部4と足部5との間に、足部5のつま先接地と踵接地とでそれぞれ逆向きの回動変位する緩衝装置6を設け、液圧シリンダー7に伸展通路73、屈曲通路74、バイパス通路75、補助通路76を設け、屈曲通路74につま先接地ロック弁77を設け、屈曲通路74Aに踵接地ロック弁79を設け、屈曲通路74Bに流量調節弁78を設け、緩衝装置6とつま先接地ロック弁77とをつま先接地伝達線77aで連結し、緩衝装置6と踵接地ロック弁79とを踵接地伝達線79aで連結し、補助通路76に補助通路開閉弁76cを設けた。
(もっと読む)
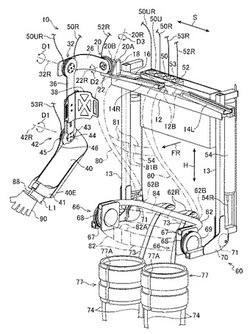
歩行装置
【課題】二足歩行用ロボットに使用される歩行装置であって、大きな負荷に耐え得るだけでなく安定した歩行動作を達成し得るように構成され、しかも設計上の自由度に優れた歩行装置を提供する。
【解決手段】歩行装置は足部10と、腰部12と、該足部及び腰部の間に設けられた脚部14とを具備する。脚部14は下腿部リンク機構16と、この下腿部リンク機構16に膝関節手段22A、22B、22C、22Dを介して接続された大腿部リンク機構18とから構成され、下腿部リンク機構18は足首関節手段20A、20B、20Cを介して足部に連結され、大腿部リンク機構18が股関節手段24A、24B、24Cを介して腰部12に連結される。腰部12には直線駆動手段26A、26Bと、回転駆動手段28が保持され、この駆動手段が足部を上下方向、前後方向及び左右方向のそれぞれに選択的に駆動させるべく大腿部側駆動リンク部材に組み込まれる。
(もっと読む)
義足足部
【課題】従来の義足足部を踵の種々の高さに自動的に適合して、立脚時の良好な安定性を保証するためである。
【解決手段】関節接続部は、基礎足部分(1,1´)に対する接続部分(3,3´)の角度位置を、基礎足部分(1,1´)に対する前足部分(12,12´)の角度位置へ比例して伝動する。
(もっと読む)
衝撃吸収及び制御回転を有する補綴デバイス用の真空ポンプ
義肢で使用される衝撃吸収及び制御回転を有する真空ポンプ(120)。このポンプは第1のチャンバを有するハウジング(220)と、第1のチャンバによって受容されてその中で往復動作を行うように形成されたシャフト(210)とを有する。ハウジングとシャフトとがポンプチャンバ(223)を形成する。ピストン(216)がシャフトへ連結されており、ポンプチャンバ内に配置されている。インテークポート(225)及びエキゾーストポート(226)がポンプチャンバへ流体連結されている。ハウジングに対するシャフトの回転を制御するために、ポンプに対して回転構造(230−234)が取り付けられている。シャフトに対する衝撃を吸収するために、衝撃吸収構造がポンプ内に設けられている。この衝撃吸収構造には、空気圧スプリング(260)及び機械式スプリング部材(250)の両方が設けられている。場合によっては、アダプタ(212)が一体状のパイロン人工フットのパイロンへシャフトを連結している。  (もっと読む)
(もっと読む)
回転、固定、ばね付勢式の人工椎間板
隣接する椎骨を安定させるための回転、固定、ばね付勢式の椎間板埋め込み具。この埋め込み具(22)は、断面形状が実質的に矩形であって、最小の高さおよび最大の幅を有している。この埋め込み具が、椎間板の一部が除去されてなる隣接する2つの椎骨の間の空間へと挿入され、椎間腔に配置された後に、当該矩形形状の埋め込み具において当該埋め込み具のより大きい方の寸法である幅を規定している面が、隣接する椎骨の本体に係合するように回転させられる。埋め込み具の一部分(56)が、当該埋め込み具から離れるように付勢されて隣接する椎骨に接触し、埋め込み具と椎骨との間にクッション効果をもたらす。次いで、固定具(24)が埋め込み具へと固定され、椎間腔における埋め込み具の更なる回転を阻止する。  (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]