
Fターム[5H680FF23]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | 速度制御 (113)
Fターム[5H680FF23]に分類される特許
1 - 20 / 113
振動型アクチュエータの制御装置
【課題】振動型アクチュエータの状態量の周期的な変動を抑制することが可能となる振動型アクチュエータの制御装置を提供する。
【解決手段】振動波により振動体と接触する移動体を相対移動させる振動型アクチュエータの制御装置であって、
振動型アクチュエータの状態量を計測する計測手段と、
振動型アクチュエータに印加する交流電圧の周波数、振幅、位相を操作するそれぞれの操作パラメータの内の、少なくとも一つの操作パラメータを含む第1の操作パラメータに、移動体の位置又は時間に応じた変動周期で変動を付与する変動付与手段と、
第1の操作パラメータに含まれる操作パラメータ以外の少なくとも一つの操作パラメータを含む第2の操作パラメータを操作し、第1の操作パラメータの周期的変動に起因する振動型アクチュエータの状態量の周期的な変動を抑制する制御手段と、を有する。
(もっと読む)
振動体の温度を検出する電気−機械エネルギー変換素子を備えた振動体の制御装置、該制御装置を有する塵埃除去装置及び振動型アクチュエータ

【課題】温度センサを用いず、駆動性能に影響を及ぼすことなく精度良く振動体の温度検出が可能となる温度検出用の電気−機械エネルギー変換素子を備えた振動体の制御装置を提供する。
【解決手段】振動体に備えられた電気−機械エネルギー変換素子に交番電圧を印加して振動波を発生させて対象物を駆動する際、該振動体の温度を検出する電気−機械エネルギー変換素子を備えた振動体の制御装置であって、
振動体の温度を検出する電気−機械エネルギー変換素子は、異なる相転移温度を有する第一の電気−機械エネルギー変換素子と第二の電気−機械エネルギー変換素子とを備え、
第一の電気−機械エネルギー変換素子は、相転移温度が使用温度範囲内にあり、
第二の電気−機械エネルギー変換素子は、相転移温度が使用温度範囲外にあるように構成される。
(もっと読む)
振動型アクチュエータの駆動装置
【課題】電圧振幅で駆動制御をするに当たり、パルス信号を発生させる際のスイッチングによる損失の増大や駆動回路が複雑になることを抑制でき、指令値どおりの振幅の交流電圧の印加が可能な振動型アクチュエータの駆動装置を提供する。
【解決手段】電気−機械エネルギー変換素子に交流電圧を印加し、振動体に対し相対移動可能とされている移動体との間に駆動力を発生させる振動型アクチュエータの駆動装置であって、交流電圧の振幅を指令する電圧振幅指令手段と、電圧振幅指令の増加に応じて、パルス幅指令およびパルス幅指令の変化率を単調に増加させてパルス幅指令を出力するパルス幅指令手段と、交流電圧と同じ周波数で且つ交流電圧を直接又は間接的に生成するパルス信号を生成して交流電圧を印加する際に、パルス幅指令に基づいて、パルス幅指令に相当するパルス幅のパルス信号を生成するパルス信号生成手段と、を有する。
(もっと読む)
超音波リニアモータおよび駆動・案内装置
【課題】 コンパクト化、低コスト化、エネルギー消費量の低減を図るとともに、振動エネルギーを大きくして質量の大きい搬送物でも搬送可能とした超音波リニアモータおよび駆動・案内装置を提供すること。
【解決手段】 振動梁3に進行波を励起し、その振動によりスライダ11を駆動する超音波リニアモータにおいて、前記振動梁3の一方の端部に2組以上、他方の端部に一方の端部と同数組以上の駆動素子911、912、921、922が付加されていて、略共振する駆動源1、2が構成されていることを特徴とする超音波リニアモータおよび前記超音波リニアモータを用いた駆動・案内装置である。
(もっと読む)
振動型モータの駆動制御装置、駆動制御方法、及びプログラム
【課題】振動型モータの起動から定常速度に到達するまでの加速期間における速度追従性を向上させる。
【解決手段】駆動開始直後の振動型モータの実速度を初速取り込み手段により検出し、初速取り込み手段により検出された振動型モータの実際の初速値が、振動型モータの実際の初速値と比較するための基準値である初速比較値よりも大きい場合には、振動型モータに対して印加する周波信号の周波数を更新せずに初期周波数を維持するように制御して、振動型モータの起動直後における速度変動を軽減させ、加速期間における振動型モータの速度追従性を向上させる。
(もっと読む)
圧電アクチュエーターの駆動方法
【課題】被駆動体の駆動の最適化を図る。
【解決手段】圧電素子に駆動信号が供給されることに基づいて振動する振動体を備え、振動体の振動を被駆動体に伝えて被駆動体を駆動させる圧電アクチュエーターの駆動方法であって、被駆動体の駆動方向と交差する方向に振動体を伸縮させる第1振動モードと、被駆動体の駆動方向に振動体を屈曲させる第2振動モードであって、第1振動モードとは独立した第2振動モードと、を同時に実行し、被駆動体の駆動を加速又は減速させる場合には、被駆動体を定速で駆動させる場合よりも、第1振動モードの振動の振幅を大きくし、且つ、第2振動モードの振動の振幅を小さくする。
(もっと読む)
振動型モータの駆動装置およびその駆動方法
【課題】振動子と接触子との間の摩耗の進行により振動型モータの駆動特性が変化しても振動型モータを安定的に駆動する。
【解決手段】駆動装置は、振動型モータ206の駆動速度を検出する速度検出手段208と、駆動速度が所定速度になるように周波電圧の周波数を制御する周波数制御手段210と、第1の時点において駆動速度を所定速度とする周波電圧の周波数である第1の周波数を記憶する記憶手段213と、第1の時点よりも後の第2の時点において駆動速度を所定速度とする周波電圧の周波数である第2の周波数を取得し、該第2の周波数と第1の周波数を用いて設定された参照周波数との差に応じて周波電圧の振幅を制御する振幅制御手段212とを有する。
(もっと読む)
圧電アクチュエーター、ロボットハンド、及びロボット
【課題】ローターの回転速度の変動を抑えて安定した回転を得ることができる圧電アクチュエーターを実現する。
【解決手段】圧電アクチュエーター100は、圧電素子11を含む振動体1と、円盤形状を有するローター2と、振動体1の一端から突出しローター2に当接する摺動部15と、圧電素子11に駆動信号を供給する駆動制御部5とを備え、駆動制御部5は、予め取得した駆動開始からの時間経過に伴うローター2の回転速度の目標値に対する差異の変化に基づいて、駆動信号の周波数を変化させて回転速度を制御する。
(もっと読む)
圧電アクチュエーター、ロボットハンド、及びロボット
【課題】安定した状態で確実に起動し安定駆動状態を維持することができる圧電アクチュエーターを実現する。
【解決手段】圧電アクチュエーター100は、圧電素子11を含む振動体1と、振動体1に設けられローター2に当接する摺動部15と、圧電素子11に駆動信号を供給する駆動回路26と、駆動信号と振動体1の振動に基づいて検出される検出信号との位相差を検出する位相差検出回路27と、駆動信号の周波数及び電力を制御する周波数制御器20とを備え、周波数制御器20は、周波数を変化させて、位相差が所定の範囲内となった場合に電圧を上限電圧値に設定し、位相差が所定の範囲外にある場合には電圧を上限電圧値よりも小さい下限電圧値に設定することを特徴とする。
(もっと読む)
超音波モータ
【課題】起動時ロータに作用する負荷にかかわらず確実に起動する超音波モータを提供することを目的としている。
【解決手段】
摩擦駆動体32は、回転軸12の円周方向に沿って形成される。ロータ11は、回転軸12に支持され、摩擦駆動体32に摩擦係合している。ロータ11は、摩擦駆動体32の振動によって回転軸12の軸心周りに回転する。動力伝達部52は、ロータ11に生じた回転力を、回転軸12を介して被駆動部材50に伝達する。動力伝達部52は、起動時に回転軸12の回転力を被駆動部材50に伝達しない一定の無負荷区間を有する。
(もっと読む)
振動型アクチュエータの駆動制御装置
【課題】挙動が不安定な低速駆動領域での不要な振動の発生を抑制して駆動を安定化させ、消費電力の抑制を図ることが可能となる振動型アクチュエータの駆動制御装置を提供する。
【解決手段】電気−機械エネルギ変換素子が設けられた弾性体を有する振動体と、前記振動体に直接的または間接的に接触する移動体と、を備え、
前記電気−機械エネルギ変換素子への印加電圧により、前記振動体に励起される振動波によって発生する摩擦力で前記移動体を振動体に対して相対移動させる振動型アクチュエータの駆動制御装置であって、
前記印加電圧の少なくとも周波数及び振幅を、指令手段からの速度指令に基づいて可変制御する制御手段を備え、
前記制御手段によって、予め定めた駆動領域で前記印加電圧の振幅を増加させる。
(もっと読む)
モータの駆動装置およびモータの駆動制御方法
【課題】複数のモータによる駆動力を合成して駆動するモータの停止に際し、バックラッシによる出力軸の角度割り出し精度の低下を抑制することが可能となるモータの駆動装置およびモータの駆動制御方法を提供する。
【解決手段】複数のモータによる駆動力を合成して被駆動部材を駆動するモータの駆動装置であって、
前記複数のモータによる合成された駆動力を被駆動部材に伝達する動力伝達手段と、
前記モータの駆動を制御する制御手段と、
を備え、前記制御手段は、前記複数のモータに対して、互いに異なるタイミングで前記複数のモータの回転速度またはトルクのうちの少なくとも一つを変更させ、互いに異なるタイミングでモータの駆動を停止させる。
(もっと読む)
圧電駆動装置、圧電駆動装置の制御方法、電子時計
【課題】被駆動体を駆動するために必要な最小限のエネルギーを入力でき、省エネルギー化を図ることができる圧電駆動装置の提供。
【解決手段】圧電駆動装置は、圧電アクチュエーターと、被駆動体の駆動量を検出する駆動量検出手段と、駆動制御手段とを備える。駆動制御手段は、圧電アクチュエーターに第1駆動信号を入力後、被駆動体の駆動量が設定値に達した場合、次に入力する第1駆動信号の入力エネルギーを前回よりも小さくする。第1駆動信号を入力後、被駆動体の駆動量が設定値に達しない場合、第2駆動信号を入力する。第2駆動信号の入力で被駆動体の駆動量が設定値に達した場合、次に入力する第1駆動信号の入力エネルギーは前回と同じにする。第2駆動信号の入力で設定値に達しない場合、第3駆動信号を駆動量が設定値に達するまで入力しかつ次に入力する第1駆動信号の入力エネルギーを前回よりも大きくする。
(もっと読む)
振動型アクチュエータの制御装置
【課題】 従来は回転速度検出において、光学式のエンコーダ等を用いずに速度検出を行う場合、移動体の形状を変える必要があった。
【解決手段】 振動型アクチュエータの振動検出用電極から検出されるS相信号に、振動体の複数の突起部の数に対応する周波数の振幅変動が生じることを利用して、回転速度情報を検出する。
(もっと読む)
振動型駆動装置の駆動方法、振動型駆動装置および撮像装置
【課題】装置の大型化、製造コストの増大化を抑制することができ、安定した起動が可能となる振動型駆動装置の駆動方法等を提供する。
【解決手段】電気−機械エネルギー変換素子と弾性体を有する振動子と、前記振動子と接触する移動体とを備え、
前記電気−機械エネルギー変換素子への交流電圧の印加により前記振動子の前記移動体との接触部に生じる楕円運動によって前記移動体を摩擦駆動する振動型駆動装置の駆動方法であって、
前記振動子と前記移動体の相対位置に対する出力分布の関係を検知し、
前記検知された出力分布の関係を元にして、前記相対位置が所定の出力を有する関係となる位置に設定し、前記設定された位置を駆動開始位置として駆動する。
(もっと読む)
駆動装置
【課題】ピエゾアクチュエータの動作開始時及び停止時に発生するメカニカルノイズを抑制する駆動装置。
【解決手段】圧電素子、圧電素子の一端に固定された駆動摩擦部材、圧電素子の他端に固定された固定部材、及び駆動摩擦部材に駆動摩擦部材の移動方向に相対的に移動可能に所定の摩擦力で係合された移動体を有するピエゾアクチュエータ1と、電源Vdrvの両端に直列に接続された複数の駆動素子Q1〜Q4を有し複数の駆動素子のオンオフ動作によりピエゾアクチュエータを駆動する駆動部FBと、ピエゾアクチュエータの特性を用いてピエゾアクチュエータを一定の移動速度で変化させるようにデューティを時間的に変化させる矩形波信号を生成し、矩形波信号を複数の駆動素子に印加する制御回路10とを有する。
(もっと読む)
振動型モータの制御方法および振動型モータの駆動装置
【課題】温度変化や駆動負荷の変化による電流の増加に対して電流の供給量を越えないようにすると共に、その供給量の制限内で大きい出力を出せるように、周波数及びパルス幅が制御可能な振動型モータの制御方法を提供する。
【解決手段】楕円運動を生成するための駆動信号を発生させる駆動信号発生手段と、駆動信号を前記電源の電圧でスイッチングし、駆動信号のパルス幅を変更するスイッチング手段と、スイッチング手段を介して電気−機械エネルギー変換素子に流れる電流を検出する電流検出手段と、被駆動体の位置および速度を検出する検出手段と、各手段の制御を司ると共に、被駆動体の速度を設定する制御部と、を備え、制御部は、目標速度に対し、電流検出手段による検出電流が所定のリミット値を越えない範囲内で最大限の出力特性が出せるように、駆動信号の周波数とパルス幅を制御する。
(もっと読む)
複数の振動子を用いた振動型アクチュエータの制御装置並びに調整方法、振動型アクチュエータ、及びそれを用いたレンズユニット並びに光学機器
【課題】 1つの被駆動体を複数の振動子で駆動する振動型アクチュエータにおいて、振動子を組み込んだ後でも個々の振動子の特性を調整することを可能にする。
【解決手段】 複数の振動子のうち1つ以上の振動子を駆動させその他の振動子を定在波駆動させた状態で被駆動体の速度を取得することにより各々の振動子における交流信号の周波数に対する被駆動体の速度の特性を取得し、取得した特性に基づいて各々の振動子に供給する交流信号の振幅と周波数と各々の振動子に供給する2つの交流信号の位相差のうち少なくとも1つを調整することで複数の振動子間の特性のずれを低減する。
(もっと読む)
振動型アクチュエータの制御装置及び制御方法
【課題】 ロータの回転方向を切り替える際、ロータの速度変動や可聴音が生じる可能性があった。
【解決手段】 本発明の振動型アクチュエータの制御装置は、第1の交流電圧を振動体に印加することによって前記振動体の接触部に生成する第1の楕円運動と、第2の交流電圧を前記振動体に印加することによって前記接触部に生成する、前記第1の楕円運動とは異なる向きに回転する第2の楕円運動と、の合成によって、前記振動体と前記振動体の接触部に接触する移動体とを相対移動させる。そして、前記第1の交流電圧と前記第2の交流電圧とを前記振動体に印加する電圧供給手段を有し、前記電圧供給手段は、前記相対移動の速度指令に応じて前記第1の楕円運動の振幅と前記第2の楕円運動の振幅との差を変化させるように、前記第1の交流電圧の振幅と前記第2の交流電圧の振幅とを夫々変化させることを特徴とする。
(もっと読む)
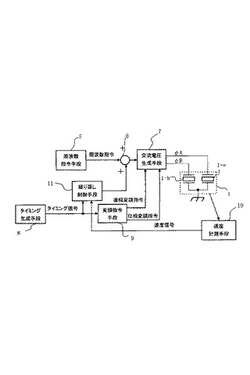
振動型アクチュエータの制御回路
【課題】 従来のPID補償器を用いた制御系では、弾性体に設けられた突起の影響により、振動型アクチュエータの駆動中に突起の数に応じた周期的な速度変動を十分に抑制することができなかった。
【解決手段】 振動型アクチュエータの制御回路において、速度又は位置をフィードバック制御する繰返し補償器を備え、繰返し周期を、突起と移動体の接触領域分布に基づく速度偏差の空間周波数に設定する。
(もっと読む)
1 - 20 / 113
[ Back to top ]