
国際特許分類[B25J17/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 接続部 (479) | 手首ジョイント (167)
国際特許分類[B25J17/02]に分類される特許
61 - 70 / 167
手術用マニピュレータ及び手術用マニピュレータシステム
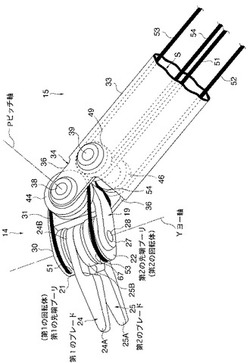
【課題】 少ないアクチュエータの数でワイヤの張力調整を行うこと。
【解決手段】 手術用マニピュレータ11は、その先端側でピッチ方向に回転可能な支持体19と、ヨー方向にそれぞれ独立して回転可能となるように支持体19に支持された第1及び第2の先端プーリ21,22と、プーリ21,22にそれぞれ一体化された第1及び第2のブレード24,25と、第1のプーリ21に固定された第1及び第2のワイヤ51,52と、第2のプーリ22に固定された第3及び第4のワイヤ53,54と、第1〜第4のワイヤ51〜54を押し引きする第1〜第4のモータ56〜59とを備えている。第1及び第2のワイヤ51,52は、引張力が作用したときに、相反する方向に第1の先端プーリ21を回転させ、第3及び第4のワイヤ53,54は、引張力が作用したときに、相反する方向に第1の先端プーリ22を回転させる。
(もっと読む)
産業用ロボットのアーム構造体

【課題】小型化を図った産業用ロボットのアーム構造体を提供する。
【解決手段】アーム構造体10において、第1軸周りに回転可能な第1リスト部11と、第1リスト部を回転可能に支持するとともに、第1軸に対して直行する第2軸周りに回転可能な第2リスト部12と、第1リスト部回転のための駆動力を発生させる第1モータ21と、第2リスト部回転のための駆動力を発生させる第2モータ31と、第1モータの駆動力を第1リスト部に伝達する第1駆動力伝達部と、第2モータの駆動力を第2リスト部に伝達する第2駆動力伝達部とを有する。第1駆動力伝達部をベルト・プーリ構造(第1回転駆動ユニット20)とし、第2駆動力伝達部はギアトレイン構造(第2回転駆動ユニット30)とすれば、ベルト24が第2モータの端部31aを跨ぐ様に配置することで小型化が可能となる。
(もっと読む)
ロボットおよびその制御方法
【課題】部品組立の時間が短縮でき、生産性の高いロボットおよびその制御方法を提供すること。
【解決手段】ハンド部165の指部166で第1の部品210を把持する際に、摂動アクチュエーター164によって摂動トルクを与えながら把持作業を行うことができ、ハンド部165の指部166と第1の部品210とがよく馴染み、第1の部品210の把持精度を向上することができる。
(もっと読む)
パラレルロボット
【課題】ツール姿勢制御用の補助駆動機構を備えたパラレルロボットにおいて、可動部の作動領域が補助駆動機構の構成によって制約される問題を解決する。
【解決手段】手首部駆動機構20は、第1回転軸44aの周りで回転可能な中空の外側ホルダ44と、第1回転軸に直交する第2回転軸46aの周りで回転可能に外側ホルダに内設される中空の中間ホルダ46と、第2回転軸に直交する第3回転軸48aの周りで回転可能に中間ホルダに内設される中空の内側ホルダ48と、外側ホルダ44を回転駆動する原動機52と、第3回転軸に直交する直動軸54aに沿って回転拘束状態で直動可能に内側ホルダに受容される棒状の伝動部材54とを備える。伝動部材54は、内側ホルダ48から離隔した一端で自在継手を介して手首部に接続され、外側ホルダ44の回転を手首部に伝達して、第3回転軸に直交する第4回転軸の周りで手首部を回転運動させる。
(もっと読む)
ハンドル回転操作装置
【課題】ノブ型ハンドルとレバー型ハンドルとで共通のハンドを用いてそれらに共通の簡単な制御でハンドルを回転させる操作装置を提供する。
【解決手段】ノブ型ハンドルおよびレバー型ハンドルを選択的に把持可能なハンド1と、少なくとも3自由度のロボットアーム2と、ハンド回転用モータM2を間に挟んだ二つの自在継手を有し、一方の自在継手U2はスプリングで中立位置に附勢されるとともに電磁ブレーキを持つものであり、他方の自在継手U1は二つの揺動用モータM3,M4で2自由度に揺動するものであるハンド回転機構2dと、ロボットアームとハンド回転機構とハンドとを作動させてハンドでハンドルを把持した後、ハンド回転機構のモータのうちハンド回転用モータを除いて外力に対して従動状態にするとともにハンド回転用モータを作動させてハンドルを回転する制御手段とを具える。
(もっと読む)
基板搬送装置
【課題】
基板の搬送方向の直進性に優れた基板搬送装置を提供する。
【解決手段】
基板搬送装置1は、補助回動ギア32と回動プーリ31とを連結するリンク部材33を備え、リンク部材33はリンク部材33の連結長(貫通孔33Aの中心P−貫通孔33Bの中心Qの間の長さ)を調整するためのリンク長さ調整部34とを備えている。このため、各部材の機械加工精度に依存して組立誤差が生じても、リンク部材33の長さ(連結長)を調整部34により調整して、補助回動ギア32の中心Oと回動プーリ31の中心Rとの間の長さと、連結長とを同じに調整できる。従って、リンク部材33により、回動プーリ31と補助回動ギア32との回動量つまり回動プーリ31と回動ギア30の回動量を一致させて、基板の搬送方向の直進性を向上させることができる。
(もっと読む)
調芯治具
【課題】 必要に応じて調芯機構を簡便にロックできる調芯治具を実現する。
【解決手段】 調芯治具は、ツールを保持するガイド部材と、ガイド部材と同軸に配置されており、そのガイド部材を複数の球体によって軸直方向に移動可能に支持する調芯機構を備えている。調芯機構には、前記複数の球体に対して軸方向に進退可能な押圧部材と、加圧又は減圧されることによって前記押圧部材を前記複数の球体に圧接させる作動室が設けられている。この調芯治具によると、作動室を加圧又は減圧することによって調芯機構をロックし、作動室を大気開放することによって調芯機構のロックを解除することができる。
(もっと読む)
多関節ロボット及びロボットシステム
【課題】より小型化できるようにした、多関節ロボット及びロボットシステムを提供する。
【解決手段】アーム構造体6にモータ12,13を内蔵した多関節ロボットであって、
モータにより駆動される被駆動体7と、モータ12,13と別体に形成され、ブレーキ軸を介してモータの回転を規制するブレーキ14,15と、モータ12,13の出力軸とブレーキ14,15のブレーキ軸14A,15Aとの間を動力伝達可能に連結する動力伝達部19とを有しているを有して構成する。
(もっと読む)
加熱ヘッド支持装置及び加熱ヘッド支持装置を用いた曲げ加工方法
【課題】加熱ヘッドの姿勢やハンドの動作範囲の制限が少なくて済み、ティーチングの自由度が拡がって、ティーチング作業及び加熱ヘッドの位置決めを簡単なものとすることができる加熱ヘッド支持装置及び加熱ヘッド支持装置を用いた曲げ加工方法を提供する。
【解決手段】高周波誘導加熱により鋼板Wを曲げる曲げ加工装置の加熱ヘッド1をロボットハンドHに取り付けて支持する加熱ヘッド支持装置10であって、ロボットハンドHに装着されるベースプレート11と、加熱ヘッド1を取り付けるヘッド取り付けプレート12と、ヘッド取り付けプレート12及びベースプレート11の間に位置して、ヘッド取り付けプレート12を揺動可能に支持し且つ負荷がない状態でヘッド取り付けプレート12を所定位置に復帰させる倣い機構のコイルばね13と、必要に応じてベースプレート11にヘッド取り付けプレート12を固定するエアシリンダ14を備えている。
(もっと読む)
ワーク搬送装置
【課題】油飛散なく、高速に平行に直線的にワークを搬送することができるワーク搬送装置を提供する。
【解決手段】ワーク搬送装置10は、ロボット11と、ロボット11のアーム13の先端部に取り付けられ、ベルト21によって直線駆動されるキャリア29を有する直動機構20と、キャリア29に取り付けられたワーク把持機構23とを備える。
(もっと読む)
61 - 70 / 167
[ Back to top ]