
国際特許分類[G05B19/408]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | プログラム制御系 (7,632) | 電気式 (7,631) | 数値制御 (2,851) | データの取り扱いまたはデータのフォーマットに特徴のあるもの,例.データの読み取り,バッファリングまたは変換 (42)
国際特許分類[G05B19/408]に分類される特許
1 - 10 / 42
最適環境設定システム
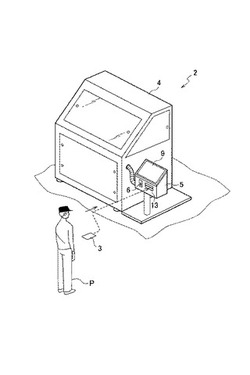
【課題】複数の作業者にとって最適な環境に設定する最適環境設定システムを提供する。
【解決手段】複数人の作業者が使用する加工機械2を各作業者Pにとって最適な環境に設定する最適環境設定システムであって、作業者Pの個人情報が予め記憶された個人情報記憶部と作業者Pにとって加工機械2の最適環境設定情報が予め記憶された設定個人情報記憶部とを有するカード3と、加工機械2に設けられてカード3に記憶された個人情報と最適環境設定情報とを読み取ると共に加工機械2での作業実績をカード3に書き込み可能なデータ読み取り書き込み部と、加工機械2に設けられてこのデータ読み取り書き込み部で読み取られた個人情報と最適環境設定情報とに基づいて加工機械2の環境を設定する環境設定部とを備えていることを特徴とする。
(もっと読む)
非真円形穴加工方法および非真円形穴加工装置

【課題】高速かつ高精度でワークを加工できる非真円形穴加工方法を提供すること。
【解決手段】非真円形穴加工方法は、シリンダブロックに既に形成された断面非真円形状のボアと同一形状のボアを、シリンダブロックに形成する。すなわち、既に形成されたボア軸線上に複数の測定点を設定し、これら複数の測定点それぞれでのボアの内径形状を測定して、内径形状データとして取得する内径形状データ取得工程と、内径形状データを周波数解析し、0次からn次(nは自然数)までの周波数成分の振幅値および位相値を分析内径形状パラメータとして算出する分析内径形状パラメータ算出工程と、前記内径形状パラメータを、加工装置の電子記憶媒体に記憶させる分析内径形状パラメータ記憶工程と、を備える。
(もっと読む)
画像処理装置及びプログラム
【課題】展開図を表す展開図画像に、その展開図の特徴に応じた線を関連付けることができる画像処理装置及びプログラムを提供する。
【解決手段】展開図画像取得部38は、展開図を表す展開図画像を取得する。線情報取得部42は、展開図に付される線を表す線情報を、展開図の特徴を表す特徴情報に関連付けて記憶する情報記憶部30から、展開図画像取得部38が取得した展開図画像の特徴を表す特徴情報に関連付けて記憶されている線情報を取得する。関連付け部44は、展開図画像取得部38が取得した展開図画像と、線情報取得部42が取得した線情報が表す線と、を関連付ける。
(もっと読む)
梱包用受け型の作製方法
【課題】搬送時の振動や衝撃による力が被搬送物の表面に均等に加わるようにすることができる梱包用受け型を作製する方法を提供する。
【解決手段】非接触レーザースキャナ2を用いて被搬送物である彫像の外形データを取得するスキャニング工程と、上記彫像の外形データを用いて等身大の雌型データを作成するデータ作成工程と、上記雌型データを数値制御工作機械に与えて発泡スチロールなどの緩衝体を加工して上記梱包用受け型を作製する受け型作製工程と、を行う。
(もっと読む)
切断装置
【課題】CCDカメラによって切断可能領域を撮影して該切断可能領域に配置された被切断材の形状や寸法を略正確に認識した上で該被切断材から切断すべき図形を割り当てる。
【解決手段】切断装置Aは、切断トーチ2と、切断トーチを切断可能領域内に移動させる台車40と、台車の駆動を制御する台車駆動制御装置30と、切断可能領域の上方に配置されて撮影するCCDカメラ1と、切断可能領域の画像を処理して配置された被切断材の形状を認識する画像処理装置10と、形状が認識された被切断材に切断すべき部品25〜27を割り当てる割当制御装置20とを有し、画像処理装置10が、画像に生じたレンズ収差を補正するレンズ収差補正部11と、CCDカメラの傾きを補正する傾き補正部12と、切断可能領域の画像を複数の領域に分割すると共に分割した各領域毎に閾値を設定して二値化することで被切断材の形状を認識する形状認識部13とを有する。
(もっと読む)
ワーク情報表示装置
【課題】パレット上の指示されたワークのワーク情報を表示するワーク情報表示装置を提供する。
【解決手段】ワーク配置領域5内に配置された各ワークW1〜W3を個別に指示自在のワーク指示手段29と、前記ワーク指示手段29の指示位置を変更操作自在な指示位置操作手段47と、上記指示位置操作手段47によって指示された前記ワーク配置領域5内の指示位置を演算する指示位置演算手段51と、この指示位置演算手段51によって演算された指示位置に該当するワークを記憶手段21から検索するワーク検索手段53と、上記ワーク検索手段53によって検索されたワークの形状寸法に基づいてデータベース23から該当するワーク情報を検索する第1検索手段25と、この第1検索手段25によって検索されたワーク情報を表示する表示手段17と、を備えている。
(もっと読む)
工作機械のワーク形状測定装置
【課題】高精度センサのみを用いた場合と比較して短時間で測定することができると共に、所定の箇所に対して高精度に測定することができる工作機械のワーク形状測定装置を提供することにある。
【解決手段】広範囲に亘って測定可能な広範囲センサ11と、このセンサ11により測定されたデータに基づき、ワーク1の概略3次元形状を作成する第一のワークモデル作成器13と、高精度に測定可能な高精度センサ12と、このセンサ12により測定されたデータに基づき、ワーク1の高精度3次元形状を作成する第二のワークモデル作成器14と、ワーク1の概略3次元形状とワーク1の高精度3次元形状に基づき、当該ワーク1の概略3次元形状にてワーク1の高精度3次元形状と一致する箇所を当該ワーク1の高精度3次元形状に置き換えてワーク1の全体3次元形状を作成するワークモデル結合器15とを備えた。
(もっと読む)
ロボット教示システム
【課題】ロボットの通過位置が加工位置であるか退避位置であるかを簡単に設定することができ、ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、通過位置データ26、加工位置データ27、および退避位置データ28を入力するための入力部22と、ロボット11の通過位置を設定する通過位置設定部24とを有している。通過位置編集部30は、ロボット11の通過位置が加工位置であるかまたは退避位置であるかを設定する。プログラム作成部31は、移動プログラム32を作成し、出力部33により移動プログラム32がロボットコントローラ12へ送信される。
(もっと読む)
ワーク識別方法およびワーク識別装置
【課題】カメラ画像からワークの種類および姿勢を認識するときの処理時間を短縮する。
【解決手段】ランダムな姿勢で供給される複数の種類のワークWiを識別するワーク識別方法であって、前記ワークWiは、1の外面Fには方向性を有し前記ワークWiごとに異なる基本マークが付与され、他の外面Fには前記基本マークを外面Fごとに識別可能に変形した派生マークが付与され、ロボット10は、前記マークを撮像する撮像手段12と、前記マークに対するマスタ画像Mを格納するマスタ画像格納手段42とを有し、前記撮像手段12により撮像されるマーク画像Pを取り込む画像入力工程S3と、取り込まれた前記マーク画像Pと前記マスタ画像Mとを比較して一致度もしくは差異を検出する画像比較工程S4と、前記画像比較工程S4で得られた比較結果から前記ワークWiの種類および姿勢を判定する判定工程S5とを有する。
(もっと読む)
工具データを準備し処理し保守するための方法
【課題】工具データセットの準備、処理、保守において、汎用的に使用できるようにし、さらに工具データセットの可変かつ自動的なメンテナンスを実現する。
【解決手段】NC制御装置とは独立した工具データマネージメントモジュールが電子データ処理装置の記憶装置に格納され、このモジュールは使用すべき工具ごとにそれぞれスタティックなデータとダイナミックなデータのためのロケーションを有する。工具データマネージメントモジュールは処理プロセスに関する別個のリストデータセットを有し、所属の工具データセットに対する参照指示がこのリストデータセットに含まれている。必要とされるリストデータセットが所属のデータセットとともに、NCデータ処理装置におけるプロセス処理部に伝送されて記憶され、工具データセットのうち少なくともダイナミックなデータが現在のNC加工プロセスに従い更新される。
(もっと読む)
1 - 10 / 42
[ Back to top ]