
Fターム[2B034HB14]の内容
土作業機(その他) (8,058) | 作物の中耕、管理又は除草機の構成 (516) | 回転する作業体 (201) | 横軸回転体 (93)
Fターム[2B034HB14]の下位に属するFターム
Fターム[2B034HB14]に分類される特許
1 - 20 / 43
中耕除草培土機
【課題】 作物の栽培されている作物畝間の中耕耘除草培土管理作業では、畝肩等に培土、乃至肥料を施用して、肥培管理作業の効率化を図る。又、施肥を中耕除草作業とは別行程として行うことになれば、畝肩、乃至畝法面等が崩れ易く、畝法面の雨水流下や、この溝底面の水通しも悪くなる。
【解決手段】 車体1後部に連結ヒッチ2を介して取付ける取付ブラケット3上に施肥機4を装着し、この取付ブラケット3に対して平行リンク5を介して上下揺動可能の作業フレーム6を装着し、この作業フレーム6には、前端部にゲージホイル7を配置し、この後側部に畝法面下部に培土する前部ディスク8と、この畝法面間の溝底部を中耕するチゼル9と、この法面上部に培土する後部ディスク10、乃至後部培土板15を配置した中耕除草培土機。
(もっと読む)
除草作業機

【課題】除草輪によって苗を傷めることなく株元の両側及び株間の除草を行うと共に、走行負荷を低減した除草作業を能率よく行うことができる除草作業機を提供する。
【解決手段】苗の株際を除草する株際除草部を、作業機体の前側又は後側に備えた除草作業機であって、前記株際除草部を、弾力性を有する線材42を放射方向に突設した左右一対の除草輪を株際の田面に接地回転可能に配設すると共に、上記左右の除草輪を、苗の株元を通過させる苗通過間隔から、上方に向けてV字状に拡開させて配設し、且つ除草輪の苗通過間隔側の側面に、回転中心から線材42の長さ中途部を覆う円盤状の線材カバー50を設けることにより、苗の葉先側と線材42の中途部との苗接触を規制し回転する線材42の先端で株際の除草を行うように構成した。
(もっと読む)
水田の雑草生育防止装置
【課題】 水田に雑草が生えることを防止する為に土壌表面に点在する種子を地中に埋没させる雑草生育防止装置の提供。
【解決手段】 フレーム1の前方には複数の鋤2,2・・を等間隔で取付けると共に該鋤には前回転羽根11と後回転羽根12を所定の間隔をおいて回転自在に軸支し、そして前回転羽根及び後回転羽根には複数枚の羽根14,14・・を回転体16から外方向へ湾曲して延ばし、そして、フレーム1の後方には上記鋤2,2・・の間の空間位置に複数本のクサリ3,3・・を吊設している。
(もっと読む)
除草作業機
【課題】田車によって苗の条間を除草し、除草輪によって苗を傷めることなく株元の両側及び株間の除草を効率よく行うと共に、走行負荷を低減した除草作業を能率よく行うことができる除草作業機を提供する。
【解決手段】苗の条間を除草する田車23F,23Rと苗の株際を除草する株際除草部38,39とを、作業機体の前側又は後側に備えた除草作業機1であって、前記株際除草部38,39を、弾力性を有する線材42を放射方向に突設した左右一対の除草輪35を、株際の田面に接地回転可能に配設することにより、回転する線材42によって株際の除草を行うように構成した。
(もっと読む)
除草用ブラシローラ及び水田除草方法
【課題】本発明は、フロートを必要とせず、稲株を傷めず、かつ稲列に沿って走行させる/走行する必要がない除草用ブラシローラ及び水田除草方法を提供する。
【解決手段】自律走行ロボットAの直進走行中は、走行方向の前後の除草用ブラシローラ1のローラ回転速度に差を設け、走行予定速度に対して一方(前部又は後部)の除草用ブラシローラ1を早く、かつ他方(後部又は前部)の除草用ブラシローラ1を遅く回転させることによって、柔軟構造の支持棒4の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことができる。前記除草用ブラシローラ1は、駆動軸2に軸支された回転ドラム3を設け、該回転ドラム3の円周外面に放射状に多数の柔軟構造の支持棒4を突設させることによって形成される。
(もっと読む)
作業車両
【課題】作業の省力化を図るため、除草作業と同時に施肥作業をも行えるようにし、除草機の中耕ディスクの土寄せと同時に畝に散布した肥料に覆土することで、散布肥料の畝底への脱落や雨による流亡を防止する。
【解決手段】本発明は、チゼル14を挟んで前後に第1中耕ディスク13と第2中耕ディスク15を配置してなる除草作業機9を車体後部に昇降可能に装備してある作業車両において、作業車両の適所に設置された施肥装置27からの粒状肥料を畝Uの作物列近傍に沿って散布する施肥ホース28を設けると共に、この施肥ホース28は前記第2中耕ディスク15の進行方向前側に配置してあることを特徴とする作業車両の構成とする。
(もっと読む)
作業車両の除草作業機
【課題】圃場条件等によって除草作業機の地面側への張圧力を任意に無段調整することができ、チゼルの土中への入り込みや中耕ディスクの土寄せ作用が効果的に行えるようにする。
【解決手段】本発明は、進行方向前側から順に配置したゲージ輪12、第1中耕ディスク13、チゼル14、第2中耕ディスク15からなる除草作業機9を作業部側メインフレーム10に対して上下に平行移動すべく昇降可能に装備し、除草作業機を支持するアッパーフレーム17と前記作業部側メインフレーム10との間には、このアッパーフレーム17を常時対地面側に向けて張圧保持する張圧手段21と、この張圧力を任意に変更調整できる張圧力無段調整手段34を設けてあることを特徴とする作業車両の除草作業機の構成とする。
(もっと読む)
作業車両
【課題】従来では、除草作業機の前部側を平行リンクで連結していた為、圃場の凹凸が存在しても平行リンク部より後方の第2中耕ディスクの追従性が悪く、作物への土寄せ精度が安定しない欠点があった。
【解決手段】本発明は、進行方向前側から順に配置したゲージ輪12、第1中耕ディスク13、チゼル14、第2中耕ディスク15からなる除草作業機9を、車体側後部に昇降調整可能に装備された作業部側メインフレーム10に対して圃場面の凹凸に追従するよう上下動自在に装備してある作業車両において、前記作業部側メインフレーム10と除草作業機9との間には、この除草作業機9の重心位置G付近を吊り下げ状態に連結支持する平行リンク機構22を介装してあることを特徴とする作業車両の構成とする。
(もっと読む)
水田除草ロボット
【課題】本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供する。
【解決手段】本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
(もっと読む)
水田における雑草の発生防止用ロボット
【課題】稲作において農薬等を使用せずに栽培する場合の水田内の雑草の発生防止、除去に要する労力を如何にして軽減するか。
【解決手段】雑草の発生防止用攪拌機を装備した小型のエアーボートをコンピュータで制御し、障害物(稲)を避けて水田内を自由に、くまなく移動することによって、雑草の発生を防止する。障害物(稲)の認識には、CCDを使用した画像認識または、レーダーのような電波探知機を使用する。水田内をくまなく移動する為に、障害物(稲)の情報にジャイロセンサーからの位置情報を付加したデータをメモリー上にマップとして記録し、走行箇所、未走行箇所を判別する。作業時間の短縮には、複数のロボットを稼働させ、お互いが無線LANで情報を共有することにより、作業を分担する。
(もっと読む)
対地作業機の検出装置
【課題】作業機フレームに吊下げ状に設ける検出橇の変形破損の防止を図る。
【解決手段】走行機体の後部ヒッチ13に対して昇降調整自在に作業機フレーム7を設け、該作業機フレーム7に対地作業機1を装着し、前記作業機フレーム7に対して上下位置変更調節自在に2対の平行リンク27,28で折り畳み可能な支持機構部25を取り付け、この支持機構部25には圃場面に接地して対地作業機1の対地作用深さ又は高さを検出するための検出橇24を設け、上記対地作業機1を上昇操作するとこの上昇動作に連動して検出橇24の後部側が持上がる姿勢に切り替える連携手段34を設ける。なお、前記支持機構部25と走行機体後部との間に連携手段としてのワイヤ38を連結する。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
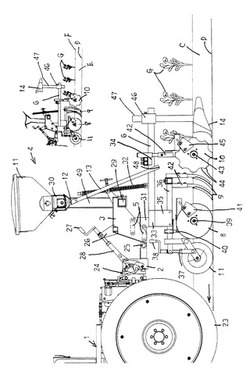
乗用型除草溝切機
【課題】除草と溝切りとを同時に行うことができる乗用型除草溝切機を提供する。
【解決手段】走行機体10の前方に除草ロータ33を有する除草部30が設けられ、後方に溝切板43を有する溝切部40が設けられる。除草部30と溝切部40はワイヤー52で連結されており、走行機体10の後方には、エンジン20の動力を利用して溝切板43を昇降させるシリンダーが配設されている。ワイヤー52は、走行機体10の後方に配置された第1の滑車の下方、走行機体10の前方に配置された第2の滑車の下方、第2の滑車よりも前方かつ上方に配置された第3の滑車の上方を通って、溝切部40を下方から引っ張り、除草部30を上方から引っ張るように配設されている。
(もっと読む)
除草抑草機及びその使用方法
【課題】 水田の水面近傍にのみ作用する除草抑草機を提供し、有機農業における生産性を向上し、延いては、環境問題の解決、生態系の保全などにも寄与する。
【解決手段】 水田の水表面近傍に、外部牽引機4に、その進行方向及び進行方向と垂直な方向に水流を発生する除草抑装置1を取り付ける。2方向の水流は、撹拌ローラーまたは水噴出ノズルと、それらから得られる水流の方向を移行させる機能を有する水流分散板3によって形成する。また、本発明においては、前記除草抑草機に、車輪やフロートから構成される高さ調整機構を付与して、水流を水田表面近傍のみに水流を形成することで、除草抑草の効果を向上することができる。
(もっと読む)
カルチベータ用横流れ防止装置
【課題】 傾斜地を耕作する場合であっても、トラクタが横流れするのを防止するためのカルチベータ用横流れ防止装置を提供することである。
【解決手段】 本発明のカルチベータ用横流れ防止装置(10)は、カルチベータの進行方向に対して実質的に直交する方向を回転軸線として回転可能に配置されたゴロクラッシャ(12)と、ゴロクラッシャの実質的に中央に、ゴロクラッシャが地面で回転すると、地面に食い込んで一緒に回転するようになった羽根片を有する横流れ防止羽根(16)とを備えていることを特徴とするものである。
(もっと読む)
中耕除草機
【課題】後列ディスクの条間の土への入り込みをし易くし、作物への培土量を増大可能な中耕除草機を提供する。
【解決手段】メインフレームに取り付けられて進行方向後側へ延びる支持フレームの前側の一方側及び他方側に横方向軸周りに回転自在に支持されて後方斜め外側に傾斜する一対の前列ディスク30と、支持フレームの後側の一方側及び他方側に横方向軸周りに回転自在に支持されて後方斜め外側に傾斜する一対の後列ディスク40とを備え、前列ディスク30及び後列ディスク40が作物Pの条間を進行しながら条間の土を中耕培土する中耕除草機1において、前列ディスク30とこのディスクよりも進行方向後側に配設された後列ディスク40との間で且つ後列ディスク40の条間幅方向内側にチゼル50が設けられ、後列ディスク40とチゼル50との間で且つ一対の前列ディスク30の条間幅方向間に、残耕を条間幅方向外側へ排除する排土機構部60が設けられる。
(もっと読む)
農用作業車
【課題】農用作業車においてドラムロータへの草類の巻き付きを少なくする。
【解決手段】除草伝動ケース24の下部に左右ドラムロータ26,26を備えた農用作業車において、高圧水を散布することのできる散布ホース37の終端側を前記左右ドラムロータ26,26の後側上方部位まで延長し、前記散布ホース37の終端から分岐した左右散布ホース37a,37bを前記左右ドラムロータ26,26の後側上部に向けて前下がり傾斜状に前方へ延出してその先端部にノズル40,40を設け、該ノズル40,40により左右ドラムロータ26,26の後部に高圧水を散布するように構成したことを特徴とする農用作業車の構成とする。
(もっと読む)
中耕除草機及び中耕培土作業方法
【課題】条間の幅に応じた中耕ディスクの位置変更作業を容易にし、また中耕作業と培土作業の切替作業が容易で、ディスクに設けたスクレーパの数を減らす。
【解決手段】作物の条間を進行しながら条間の土を中耕培土する中耕ユニット20と、これを支持するメインフレーム3を備えた中耕除草機であって、中耕ユニット20は、メインフレーム3に前端側が接続されて進行方向後側へ張り出す支持フレーム21と、支持フレーム21に設けられ、条間の幅方向に突没且つ突出長さ調整が可能な一対のアーム支持部40と、回転自在に支持されて進行方向に対するディスク62の角度を調節した状態で保持される後列ディスク60とを有する。後列ディスク60は、アーム支持部40に対して着脱可能であり、一方のアーム支持部40の支持位置に進行方向に対するディスク62の角度を同一にしたままで他方のアーム支持部40に取り付け可能である。
(もっと読む)
苗移植機
【課題】ロータの上下の変動を勘案して圃場に苗を植え付けることができる苗移植機を提供すること。
【解決手段】油圧シリンダ46によりリンク装置3を介してフロート55を上下動させ、苗植付部4に対して昇降自在に配置され、走行車体2の進行方向を横断する横幅方向に向けて複数個配置されるロータ27a,27bをモータ63で上下動させる。フロート55の前後傾斜角度の複数の設定角度にそれぞれ対応させてフロート55の上下動の感度を敏感側から鈍感側までの複数段階に分けて制御感度変更ダイヤルで制御感度として設定し、モータ63の駆動量の設定に応じてロータ27a,27bの設定高さを調節し、接地圧変動によるフロート55の姿勢変化に基づいて苗植装置4の上下位置を制御し、モータ63によるロータ27a,27bの設定高さを低く設定すればする程、フロート55の制御感度を鈍感側に補正する制御をする制御装置100を設けている。
(もっと読む)
水田用除草機
【課題】条間除草機構及び株間除草機構の除草の作業深さを別個に調整しなければならず、かつその操作も面倒で、除草の準備作業に時間が掛ってしまう。
【解決手段】メインフレーム3と支持ベース4との間に作業深さ均等調整機構10を介在し、ハンドル10bにより、株間除草機構6及び条間除草機構5を上下方向に平行に調整する。作業深さ相対調整機構を介して条間除草機構5を連結し、操作レバー11により、株間除草機構6に対して条間除草機構5を上下方向に調整する。
(もっと読む)
1 - 20 / 43
[ Back to top ]