
Fターム[2B043EA15]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 車両又は作業機の状態 (190) | 車両又は作業機の傾斜 (12)
Fターム[2B043EA15]に分類される特許
1 - 12 / 12
作業車両
【課題】
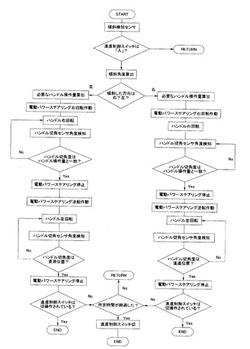
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
自走車両

【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
苗移植機
【課題】作業者が苗植付装置の入切や苗植付部の昇降などを操作することなく、作業者の労力の軽減が図れると共に、苗の植付作業の効率が向上する苗移植機の提供である。
【解決手段】左右前輪10及び左右後輪11と、フレーム15と、左右前輪10を操向操作するハンドル34と、ハンドル34の操向角度を検出する切れ角センサ93と、フレーム15の後方に昇降リンク装置3を介して昇降可能に連結し、苗載台51と苗植付装置52とを備えた苗植付部4と、苗植付装置52の作業状態切替レバー68と、昇降リンク装置3の油圧シリンダ46や油圧バルブ80などの昇降手段と、切れ角センサ93の値に応じて昇降手段による苗植付部4の昇降及び切替レバー68の切替を制御する制御装置100とを設けた苗移植機である。ハンドル操作に苗植付部4の昇降と苗植付装置52の入切が連動するため、作業者が苗植付装置52の入切をする必要がなく、労力が軽減する。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
作業車の最高速度制御機構
【課題】変速アクチュエータを駆動制御して移動速度を変更する構成において、最高移動速度を制限する最高速度設定器を備えることにより、操作性および走行性の良い作業車の最高速度制御機構を提供する。
【解決手段】エンジン5が搭載された走行機体3と、無段変速装置と、変速ペダル16(変速操作具)と、変速ペダル(変速操作具)の操作量に基づいて無段変速装置を変速制御する変速アクチュエータと、を備えた田植機1において、変速ペダル(変速操作具)を最大に操作したときの最高移動速度を制限する最高速度設定器を設け、路上走行または走行機体の傾動によって、最高移動速度を制限可能に構成した田植機(作業車)の最高速度制御機構である。
(もっと読む)
作業車両
【課題】各種機構を設け操作性を向上させる一方で各種連動を規制又は解除可能に構成して種々の状況に対応できるようにするとともに、操作具を減らして製造コストを低く抑えた作業車両を提供する。
【解決手段】走行部を制動させるブレーキ機構の入作動に連動して主クラッチ機構を切作動させて動力遮断状態とする一方でブレーキ機構の切作動に連動して主クラッチ機構を入作動させるクラッチ・ブレーキ連動機構46と、主クラッチ機構及びブレーキ機構の入切操作を行う単一の入切ペダル16と、操向連動機構54によるサイドクラッチの操向操作との連動を規制する規制機構49と、規制機構49を介してサイドクラッチの操向作動との連動を規制する規制操作を行う操作具51と、該操作具51の上記規制操作によって入切ペダル16によるブレーキ機構の入作動時に主クラッチ機構を入作動させることが可能な入作動機構47とを備えている。
(もっと読む)
自走式作業台車
【課題】 作業ユニットを安定的に支持することができるとともに、傾斜地でも安定して走行しながら作業を行うことができる自走式作業台車を提供すること。
【解決手段】 走行体本体4、前輪24及び後輪を備えた自走式走行体と、走行体本体4に設けられた支柱54と、支柱54に取り付けられた支持フレーム74と、支持フレーム74に装着された作業ユニット140と、支持フレーム74の先端部に設けられた支持・操作手段110と、を具備する。前輪24及び後輪の少なくともいずれか一方は駆動輪として機能し、また前輪24及び後輪の少なくともいずれか一方は操舵可能であり、更に、支持フレーム74は、支柱54を中心として180度以上の角度範囲にわたって旋回自在に支持されているとともに、仰俯角が水平方向を基準に5度以上となるように上下方向に揺動自在に支持されている。
(もっと読む)
農用作業機
【課題】水田などの走行不安定な圃場において安定走行を実現することができる農用作業機を提供する。
【解決手段】
走行検知手段により走行機体の走行状態を検知し、安定制御手段によりその走行状態と予め設定した走行条件とを比較演算し、もし、設定条件と異なる走行状態である場合、機体を安定制御する信号を走行安定化手段に出力し、その走行安定化手段により機体の走行状態を安定化させるので、水田などの走行不安定な圃場において、スタックなどに陥ることなく安定走行を実現することができる。
(もっと読む)
トラクタ作業機のローリング制御装置
【課題】圃場の畦際等でのトラクタ作業で操向旋回時における不安定なローリング制御状態を回避しようとする。
【解決手段】 トラクタ車体(1)に作業機(2)を装着し、車体(1)の左右傾斜角を検出する傾斜センサ(3)と、車速を検出する車速センサ(4)と、車体(1)の操向角を検出する操向センサ(5)等を有し、各センサ(3)、(4)、(5)の検出に基づいて、車体(1)に対して作業機(2)の連結姿勢を水平制御や、平行制御を行わせると共に、操向センサ(5)が一定以上の切り角を検出すると該水平制御を停止して平行制御を行わせ、この操向センサ(5)が一定以下の切り角を検出して一定時間経過すると該水平制御に復帰させる。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
クローラ走行車
【課題】作業を中断させることなくスピンターンスイッチ操作によってスピンターンの禁止及び許可の切換を行い、走行クローラの走行性能を路面条件に適応させて維持させる。
【解決手段】左右走行クローラを同一方向に同一速度で駆動する変速部材と、左右走行クローラの旋回用操向部材を設けるクローラ走行車において、操向ハンドルにスピンターンスイッチを設け、操向ハンドルを握る手で操作可能な範囲にスピンターンスイッチを配置させたことを特徴とする。
(もっと読む)
1 - 12 / 12
[ Back to top ]