
Fターム[2B043EA23]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 作物の状態 (37) | 作物の存在又は状態 (25)
Fターム[2B043EA23]の下位に属するFターム
刈残し穀稈
欠株
未刈地と既刈地又は未植地と既植地 (11)
Fターム[2B043EA23]に分類される特許
1 - 14 / 14
農作業機
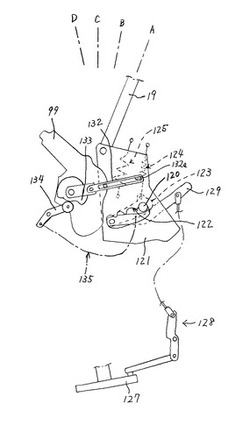
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
水田における雑草の発生防止用ロボット

【課題】稲作において農薬等を使用せずに栽培する場合の水田内の雑草の発生防止、除去に要する労力を如何にして軽減するか。
【解決手段】雑草の発生防止用攪拌機を装備した小型のエアーボートをコンピュータで制御し、障害物(稲)を避けて水田内を自由に、くまなく移動することによって、雑草の発生を防止する。障害物(稲)の認識には、CCDを使用した画像認識または、レーダーのような電波探知機を使用する。水田内をくまなく移動する為に、障害物(稲)の情報にジャイロセンサーからの位置情報を付加したデータをメモリー上にマップとして記録し、走行箇所、未走行箇所を判別する。作業時間の短縮には、複数のロボットを稼働させ、お互いが無線LANで情報を共有することにより、作業を分担する。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
作業車の操向制御装置
【課題】トランスミッションの応答性能に拠らず、さらに、機体位置検出手段が検出不能域に存在する場合であっても、機体を、所定の進行方向から外れることなく圃場の作物に沿って自動操向させることのできる作業車の操向制御装置を提供すること。
【解決手段】機体位置検出手段16の検出値に基づいて、修正出力を出して機体が圃場の作物Mに沿うように操向操作手段22a,22bを制御する操向制御手段23aと、操向制御手段23aが修正出力の出力を開始すると、右及び左の回転数検出手段26a,26bの検出値の差を演算する演算手段23bとを備え、演算手段23bの演算値が設定値以上になると、操向制御手段23aが修正出力の出力を停止するように構成する。
(もっと読む)
コンバインの自動方向制御装置
【課題】オペレータが疎植圃場を刈り取っていることしっかり認識し、刈取走行方向が乱れようとすると直ちに手動操向によって走行方向を修正出来るようにする。
【解決手段】穀稈センサ1a,1bが未刈穀稈に接触して刈取部13の位置を検出し、その検出結果で走行方向を制御する制御装置2を設けたコンバインの自動刈取方向制御において、従来の植付間隔よりも広い疎植を判定する手段S22を設け、刈取開始後に疎植を判定すれば、オペレータに疎植された圃場での刈取中であることを知らせる手段S23を設けたことを特徴とするコンバインの自動方向制御装置とした。
(もっと読む)
コンバインの方向制御装置
【課題】左右方向及び前後方向の株間を共に例えば30cmとした粗植栽培方式の圃場において、コンバインの方向制御を迅速に実行する。
【解決手段】刈取搬送部(6)に刈取対象穀稈への接近状態を検出できる方向センサ(21)を設け、該方向センサ(21)の検出結果に基づいて機体を操向させるように方向制御出力を行なうと共に刈取対象穀稈列の条横判定制御を行なう制御部(26)を設け、方向制御スイッチ(32)が入りで、前記条横判定入切スイッチ(31)が切りのときには、前記制御部(26)は条横判定をせずに方向制御出力をする構成とする。
(もっと読む)
コンバイン
【課題】デバイダの位置調整を行うための操作を簡潔にして、操作性を向上させたコンバインを提供する。
【解決手段】走行機体2の前方に、複数のデバイダ21、22、23を有する刈取り部20を昇降自在に支持し、前記走行機体2を操向操作手段15により操向操作してなる、コンバイン1において、最も外側にある前記デバイダ23を、幅方向に移動自在に支持すると共にアクチュエータにより幅方向位置を調整自在とし、前記操向操作手段15の操向レバーに、前記コンバイン1の走行方向を微調整する右方向微調スイッチ16を備え、該右方向微調スイッチ16により前記アクチュエータを操作して、前記デバイダ23の位置を調整するようにした。
(もっと読む)
コンバイン
【課題】グレンタンクに収穫穀物が貯留され、直進性が低下した場合に、走行方向を修正する操向制御手段を具備するコンバインを提供する。
【解決手段】走行機体の左右どちらか一方にグレンタンク15を具備するコンバインにおいて、作業時に、グレンタンク15の重量を検知して、その重量に応じて操向手段を駆動して、直進するように操向制御手段150を具備した。また、前記操向制御手段は、左右のクローラの回転数を変更することにより行う。
(もっと読む)
コンバイン
【課題】株間距離の大きい疎植圃場を含めて植付け条に対する追従性を確保することが可能となる簡易な構成のコンバインを提供する。
【解決手段】コンバインは、刈取部Eに取付けられて刈取るべき未刈穀稈を接触により検出する穀稈センサ1a(または1b)の検出信号により、機体進行方向に続く刈取条の未刈穀稈列A(またはB)に追従走行するべく左右の旋回方向を決定して機体の進行方向を制御処理する制御部Cを備えて構成され、上記穀稈センサ1a(または1b)はコンバインが刈取るべき刈取幅のいずれかの外側位置で同側の最外側穀稈A(またはB)までの内側方向距離を検出する位置に設定し、その内側方向距離が所定値となるように上記制御部Cが左右方向の機体旋回制御処理をするものである。
(もっと読む)
作業車の画像処理装置
【課題】 列状に並んだ物体を撮影し、列状に並んだ物体に沿って線分を設定する作業車の画像処理装置において、外乱の影響をできるだけ小さくする。
【解決手段】 撮影データから物体A1,A2の色相を備えた画素を抽出する抽出手段と撮影データにエッジ処理を施して画素を抽出するエッジ処理手段とを備え、抽出手段及びエッジ処理手段の両方の処理を受けて抽出された画素を物体A1,A2に対応する画素として設定、又は、抽出手段及びエッジ処理手段の一方の処理を受けて抽出された画素を物体A1,A2に対応する画素として設定する画素設定手段を備える。物体A1,A2に対応する画素に沿って線分を設定する線分設定手段を備える。
(もっと読む)
根菜類収穫機の根菜類列検知装置
【課題】 センサの調整条件を極力減らせる簡易な構造にすることで茎葉等の夾雑物の絡まりを防止するとともに、畝からの接地負荷に対する追従性を高めることにより、根菜類列の検知精度を高めることができる根菜類収穫機の根菜類列検知装置を提供する。
【解決手段】 接触アーム3は、畝から受ける上方向の押圧力を吸収し得る弾性力を備えているとともに、所定の下向傾斜角で左右の内側方向に延設された接触先端部32と、この接触先端部32から左右の外側方向に湾出された湾曲部31とを有しており、接触先端部32が根菜類の頭側部に当接した場合、その当接力により湾曲部31を左右の外側方向に回動させてその回動変位を変位センサ5Aに伝達し、接触先端部32が畝に接触して下方から押圧された場合、その押圧力を湾曲部31の弾性力によって吸収して変位センサ5Aに伝達しないように構成されている。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、自動走行手段及び人為選択操作具を備えた場合、人為選択操作具の操作により自動走行手段の作動の選択が適切に行われるように構成する。
【解決手段】 前輪1を操向操作可能なアクチュエータ27を備えて、アクチュエータ27を前輪1に機械的に連係させる連係状態及び解除状態に設定自在に構成する。検出手段38の検出に基づいて機体が既に植え付けられた隣の苗列L1に沿って走行するように、アクチュエータ27により前輪1を自動的に操向操作する自動走行手段を備える。人為選択操作具29により自動走行モードが設定されると、アクチュエータ27が連係状態に設定されて自動走行手段が作動し、人為選択操作具29により手動走行モードが設定されると、アクチュエータ27が解除状態に設定される。
(もっと読む)
コンバイン
【課題】 倒伏穀稈状況における自動方向制御の不安定化。
【解決手段】 左右一対のクローラ3を有する走行装置2と、前記走行装置2の前方に設けた圃場の穀稈を刈取搬送する刈取部5とを有し、該刈取部5は、圃場の株列Kと株列Kの間の株間を各分草体10が通るように、自動方向制御機構Sにより方向修正しながら走行するように構成し、前記自動方向制御機構Sは、前記脱穀装置4あるいはグレンタンク6等の任意の機体後部に設けた後方撮影機材15による撮影した画像により、前記刈取部5が既に切断した穀稈の株列Kを認識し、この株列Kと機体とのずれを検出して方向制御を行うように構成したコンバイン。
(もっと読む)
操向制御方法及び装置
【課題】
視界に入っている一行程前に移植された苗一列全てに対してただ一つの直線を定め、これに対して平行に移植機を走行させる。
【解決手段】
移植機に設けた撮像手段によって既植の苗列を撮像して苗列の画像情報を取得するステップと、該画像情報から苗列領域が抽出された2値画像を取得するステップと、該2値画像を逆透視変換して2値化された苗列領域の仮想地平面画像を取得するステップと、該仮想地平面画像において該苗列領域を直線で近似するステップと、該直線に対する移植機の位置情報に基づいて操向制御を行うステップとを有する。
(もっと読む)
1 - 14 / 14
[ Back to top ]