
Fターム[2B043EA35]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 圃場の状態 (78) | 圃場又は路面の状態 (57) | 畝又は畦 (36)
Fターム[2B043EA35]に分類される特許
1 - 20 / 36
乗用管理機
苗移植機
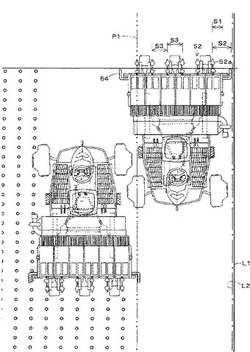
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
苗移植機

【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
苗移植機
【課題】レバー式植付操作機構に旋回連動機構を備える苗移植機において、植付昇降レバーの誤操作によることなく、植付部の安定動作を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、走行車体を旋回操作する操舵部材(4)と、走行車体に昇降可能に支持した植付部(6)と、この植付部(6)の上昇、中立、下降、植付の順に切替え動作させる植付昇降レバー(8)と、上記操舵部材(4)による旋回の開始及び終了と連動して植付昇降レバー(8)を上昇と下降の位置に移動させる自動昇降機構(C)とを備えて構成され、上記植付部(6)の植付作業を検知する作業検知部材を設け、検知した作業が所定の継続範囲に該当しない場合に自動昇降機構(C)の作動を停止するものである。
(もっと読む)
苗移植機
【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
苗移植機
【課題】
畦際作業の際に、線引きマーカが一側に連続して作動し、畦や圃場に植え付けた苗に線引きマーカが接触することを防止可能な苗移植機を提供する。
【解決手段】
畦際での植付作業を検知する畦際検知部材76を設け、畦際検知部材76が畦際での植付作業を検知すると、苗植付部4を昇降させてもマーカ切替装置72の線引きマーカ68の作動方向を切り替えない構成とすると共に、畦際検知部材76が畦際での植付作業を検知すると線引きマーカ68の昇降回数を記憶する作動回数検知部材77を設け、作動回数検知部材77の検知回数が所定回数未満であるときは苗植付部4を昇降させてもマーカ切替装置72の作動方向を切り替えない構成とすると共に、作動回数検知部材77の検知回数が所定回数以上になると線引きマーカ68が圃場に線を形成しないようにマーカ切替装置72の作動を停止する構成とする。
(もっと読む)
伸縮作業いす
【課題】着座状態で多方向を向いての作業を可能にし作業効率を向上、維持させるとともに労働者の体への負担軽減を可能にする。
【解決手段】本願の伸縮作業いすは畝上、畝溝上で移動可能な座板と臀部安定板により労働者にあった作業位置で多方向に座り、移動しながらの作業を可能にした農作業用の実用的ないすである。車輪を設け移動しながらの手入れ、種蒔き、収穫作業をする事が出来る。畝幅、労働条件に合せて幅と高さを調整し、座板を労働者にあった位置に据え付けることで、一定方向に限定されていた作業範囲を開放した。一定方向を向いての作業を開放することにより労働者は自身にあった作業体勢で作業ができ、長時間の作業の場合は着座位置を変更しながら楽な体勢で作業を維持、継続することができる。また座板に臀部安定板を組付けることにより臀部が安定板に緩衝することで走行移動を補助し、また、体の安定性を図った。
(もっと読む)
水田作業機
【課題】水田作業機において、畦際での旋回終了を適切に検出する。
【解決手段】右の車輪2に動力を伝達する右のサイドクラッチ40と、左の車輪2に動力を伝達する左のサイドクラッチ40とを備える。操向操作自在な車輪1が直進位置A1側から右又は左の操向限度A3側に操向操作されると、右又は左のサイドクラッチ40が遮断状態に操作され、操向操作自在な車輪1が右又は左の操向限度A3側から直進位置A1側に操作されると、遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されるように構成する。車輪2の回転数に基づいて機体の前進及び後進の走行距離を検出する走行距離検出手段を備える。遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されたことと、走行距離検出手段で検出された機体の前進の走行距離と機体の後進の走行距離との差、とに基づいて旋回終了を検出する。
(もっと読む)
作業機
【課題】機体の旋回走行が終了して次回の作業行程にて作業走行するときに、作動部を時間遅れなく作動状態にすることが可能となる作業機を提供する。
【解決手段】電動モータM3の操作によって作動状態と非作動状態とに切り換え操作自在な作動部が、作動状態側に切り換えてから起動用所要時間が経過したのちに作動状態に切り換わるように構成され、旋回行程中における機体の位置を検出する機体位置検出手段51と機体の走行速度を検出する車速検出手段50との検出情報に基づいて、機体が旋回走行を開始したのちに旋回終了位置に至ると予測される時点よりも起動用所要時間に相当する時間だけ前の時点における機体位置に至ると予測されるタイミングを求めて、そのタイミングにて電動モータM3を作動状態側に切り換える作動部操作手段53と、前記タイミングを補正する人為操作式のタイミング補正手段100とが備えられている。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
作業機
【課題】 本発明は、圃場状況や作業条件に対応して、整地ロータによる整地作用を適正に得られるようにすることを課題とする。
【解決手段】 走行車体の後側に昇降可能に作業部を設け、整地ロータを有する整地装置を作業部に設け、走行車体の走行速度に対する整地ロータの回転速度を変更するロータ変速装置を設け、畦際の近くでの作業であることを判別する畦際作業判別装置を設け、畦際作業判別装置により畦際の近くでの作業であることを判別されるのに連動してロータ変速装置を高速側に切り換える連動装置を設けた作業機とした。
(もっと読む)
作業車両
【課題】
本発明の課題は、旋回時の車速が速く設定されている場合にあっても、植付作業部をタイミング良く下降させて畦に対する干渉や空植えを防止することにある。
【解決手段】
この発明は、操向ハンドルの左右旋回操作によって前輪が左又は右に操向操作されると、旋回外側の後輪の回転速度に対して旋回内側の後輪の回転速度が所定速度以下になったとき旋回内側のサイドクラッチを強制的に「入」にして旋回内側の後輪を所定の回転量だけ強制駆動する旋回制御手段(TC)を備えた作業車両において、機体旋回時に作業部を上昇させ、機体旋回開始後、所定角度旋回すると作業部を所定位置に下降させる作業部昇降制御手段(UD)を備え、車速が速く設定されている場合には、作業部の下げ速度を増速制御する下降速度制御手段(DV)を設けてあることを特徴とする。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
走行散布作業機
【課題】GPS信号に基づき走行散布作業機の位置情報を得て、隣接位置での重複した農作業を行なうことがないようにした走行散布作業機を提供すること。
【解決手段】GPSより得られる位置情報から機体の直進方位と、旋回開始位置から90度旋回して旋回戻し位置(e地点)に達した後、さらに90度旋回して直進する隣接作業方位を求め、肥料噴管からの粉粒体の散布幅を読込み、求めた直進方位と隣接作業方位から両方位間の移動距離d1を算出し、隣接作業方位から隣接作業方位と旋回戻し位置の移動距離d2を算出し、移動距離d1から隣接作業方位と前記旋回戻し位置の間隔を差し引いて前記間隔(移動距離d1−d2)を算出し、旋回開始位置と旋回戻し位置の間隔(移動距離d1−d2)を位置情報に変換して旋回戻し位置を求め、旋回を開始すると粉粒体散布装置を駆動停止させ、隣接作業位置(f地点)に達すると粉粒体肥料散布装置を駆動開始させる。
(もっと読む)
乗用作業機
【課題】乗用作業機の畦越えや車両への積み降ろし時の自走移動を、地上からの操縦によって安全かつ的確に行えるようにする。
【解決手段】走行機体3の前部に、走行機体3側に後退した第1姿勢と、走行機体3の前方に突出した第2姿勢とに切り換え可能に構成した握り操作具16を備え、握り操作具16を第2姿勢に切り換えた状態での握り操作具16の下方への押し下げ操作により前輪1の操向作動を牽制阻止するように構成する。
(もっと読む)
農薬散布用ホバークラフト
【課題】特別なテクニックを要せずに、ラダーの向きを変え推進力を加えることで容易に離岸することができる農薬散布用ホバークラフトを提供する。
【解決手段】ホバークラフト本体5と、進行方向と進行速度の他、種々の設定を所望に遠隔制御する無線信号を送信すると共に、CCDカメラ12によって映し出される船艇前方の映像信号を受信しモニタ31に現出する他、畦道や土手等の障害物に対する接近状態を感知した際、超音波センサー装置11が送信する警告信号を受信し、スピーカー30から警告音を発生させるコントローラ26の組み合わせから構成されており、農薬散布用ホバークラフト1は、ホバークラフト本体5の船首6近傍上甲板及び船尾7近傍上甲板に設けられた固定具17間にグラスファィバー製の離岸ロッド16が右舷8縁及び左舷9縁より側方に円弧状膨出して張架されていることに特徴する。
(もっと読む)
走行車両
【課題】8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】旋回外側の後輪11の回転数センサ205aと旋回内側の後輪11の回転数センサ205bを用いて車体2の旋回時において、旋回内側の後輪11の駆動力を旋回連動機構Aにより断続的に入/切する周期を、旋回外側の後輪の回転数センサ205aにより検出される回転数(a1)に応じて変更する制御装置163を備えているので、たとえ湿田走行中であっても、所望の走行経路で旋回が可能となる。
(もっと読む)
1 - 20 / 36
[ Back to top ]