
Fターム[2B063AA06]の内容
移植機(田植機の接地部) (1,596) | 目的、機能 (297) | 移植機等の性能向上 (291) | 作業精度の向上 (39)
Fターム[2B063AA06]に分類される特許
1 - 20 / 39
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
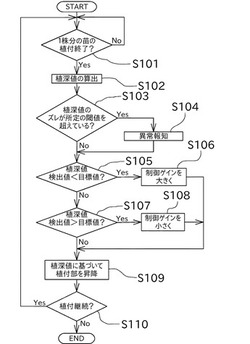
【解決手段】田植機は、植付部と、土壌反力検出装置と、制御部と、を備える。植付部は、植付爪を駆動することにより苗の植付けを行う。土壌反力検出装置は、植付爪が苗の植え付けを行うごとに土壌から受ける土壌反力を検出する土壌反力検出部と、植付爪の回転位相を検出する回転位相検出部を備えている。前記制御部は、前記土壌反力及び回転位相に基づいて植深値を算出する(S102)。そして制御部は、検出された植深値に基づいて、植付部を昇降制御する(S109)。
(もっと読む)
水田作業機

【課題】既植苗の存在箇所や既播種位置に近い側における整地用ロータの端部で、多量の泥押しや泥波が発生する可能性を低減させる。
【解決手段】左右方向での端部側に位置する端部ロータ部分53Bと、左右方向での中央側に位置する中央部ロータ部分53Aとを備えて構成された整地用ロータ53の端部ロータ部分53Bを、中央部ロータ部分53Aの駆動速度よりも低速での回転が可能な自由回転状態、または田面から離れた非整地状態に切換可能に構成してある。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
水田作業機
【課題】整地体の接地フロートから前方への突出の回避や抑制が可能で、かつ接地フロートの昇降調節に連動した整地体の昇降が可能でありながら、整地体に良好な泥土の押さえ込みを発揮させることができる水田作業機を提供する。
【解決手段】接地フロート11の横側方に整地体26を配置してある。整地体26を、フロート支軸36から機体前方向きに延出して延出端26tがフロート支軸36より機体前方側に位置する状態でフロート支軸36に一体回動自在に連結された取付け部26bと、取付け部26bの延出端26tから機体後方下方向きに延出して整地する板状整地部26aとを備えて構成してある。
(もっと読む)
苗移植機
【課題】旋回時にも圃場が均され過ぎないように整地できる対地作業用の旋回ロータを備えた苗移植機を提供すること。
【解決手段】走行車体2の後部に圃場に苗を植え付ける苗植付部4の下部に圃場面を均す左右の整地ロータ27a,27bと、エンジン20の駆動力を後輪11に供給する左右の後輪ギアケース18を設けた苗移植機において、左右の前記ギアケース18から左右両側の整地ロータ27a,27aに駆動力をそれぞれ独立して供給する左右別々のロータ駆動軸70a,70bを設け、旋回動作させたときに、旋回内側の整地ロータ駆動軸70a,70bが旋回外側の整地ロータ駆動軸70a,70bよりも低速で回転する構成としたので旋回内側の整地ロータ27a,27bで圃場の泥土が柔らかくなり過ぎて流れてしまうことが防止できる。
(もっと読む)
苗移植機
【課題】
畦際の旋回痕を整地ロータで充分に均し、圃場均平用フロートで均平にすることで、畦際での苗の植付深さを揃える苗移植機を提供することにある。
【解決手段】
走行車体2の後部に整地ロータ27とフロート55,56と苗植付装置52を設けた苗植機において、左右の整地ロータ27a,27bをそれぞれ独立昇降自在に構成し、畦際での植付作業を検出する畦際検出部材SAを設け、畦際検出部材SAで検出した畦側の整地ロータ27a,27bを反対側の整地ロータ27a,27bよりも下方へ降下させ、畦際検出部材SAを、左右の畦クラッチレバー71,71の操作を検知する左右の畦クラッチスイッチ71a,71bで構成し、左右の畦クラッチスイッチ71a,71bを操作すると左右の整地ロータ27a,27bのいずれか一方を下方に下降させる構成とする。
(もっと読む)
水田作業機
【課題】圃場の泥水が作業装置の左右両側外方に多量に押し流されることを回避することが可能となる水田作業機を提供する。
【解決手段】走行機体と作業装置との間に整地装置が備えられ、整地装置が、横軸芯周りで駆動回転される整地用回転体62A,62Bと、泥水が作業装置に飛散するのを防止する泥除けカバー66とを備えて構成され、整地装置53が、外径寸法が互いに異なる大径の整地用回転体62Aと小径の整地用回転体62Bとを同一横軸芯周りで駆動回転する状態で備え、泥除けカバー66における小径用カバー部分66Bが、その後端部の位置を大径用カバー部分66Aの後端部の位置よりも機体前方側に位置させる状態で設けられ、且つ、小径用カバー部分66Bと大径用カバー部分66Aとの間に泥水通過用の隙間S2が形成されている。
(もっと読む)
田植機
【課題】フロートの上下動に対する昇降切換手段の切り換えの感度を制御し、植付装置における苗の植付深さを一定に保持することができる田植機を提供することを目的とする。
【解決手段】走行機体2の後方に昇降機構4を介して植付装置3を昇降自在に連結する田植機1において、昇降機構4には植付装置3を昇降する油圧シリンダ33(昇降アクチュエータ)と、油圧シリンダ33(昇降アクチュエータ)の昇降制御を行う油圧切換バルブ34(昇降切換手段)と、油圧切換バルブ34(昇降切換手段)の切換を行う切換操作アーム35とが備えられ、切換操作アーム35には植付装置3に設けられるフロート70の上下動を検知する上下動検知手段71と、走行機体2の走行速度を変更する変速アーム55とが連動連結され、油圧切換バルブ34(昇降切換手段)は、走行速度が増速側に変速されると、その増速に応じて植付深さが深くなる側に操作される田植機1である。
(もっと読む)
水田作業機
【課題】整地装置の泥滞留に起因した整地装置による泥水の押し出しを効果的に抑制することができる水田作業機を提供する。
【解決手段】整地装置40を整地作用する整地作用状態と整地装置40における泥滞留の解消を図る泥滞留解消状態とに切り換え操作する切り換え手段97,98と、整地装置40における泥滞留の発生を検出する泥滞留検出手段92,93とを設けてある。泥滞留検出手段92,93が検出作動すると、整地装置40が泥滞留解消状態に切り換え操作されるように泥滞留検出手段92,93による検出情報を基に切り換え手段97,98を自動的に操作する制御手段96を設けてある。
(もっと読む)
農作業機の整地装置
【課題】本発明では、整地ロータの藁屑などの夾雑物の埋め込み機能を整地装置の左右全面で良好に行われるようにすることを課題とする。
【解決手段】走行車体の後部で左右後輪の後側に位置して側部整地ロータを設け、その左右側部整地ロータの間に中央整地ロータ27bを配置し、これら側部整地ロータと中央整地ロータ27bの後部にフロートを配置した農作業機の整地装置において、側部整地ロータと中央整地ロータ27bをロータ片119で整地すると共に中央整地ロータ27bのロータ片119の外周径を側部整地ロータのロータ片の外周径よりも大径にしたことを特徴とする農作業機の整地装置とした。
(もっと読む)
乗用型水田作業機
【課題】回転駆動自在な整地ロータによる整地を行わせるものでありながら、水田作業装置の不適切な対地高さ制御の発生を回避しやすく、かつ整地ロータの昇降操作を構造簡単に行うことができる乗用型水田作業機を提供する。
【解決手段】接地センサフロート12の左側及び右側に、回転駆動自在な整地ロータ50を設けてある。左側の整地ロータ50と右側の整地ロータ50とに各別に動力伝達する一対の伝動手段60,60を設けてある。左側の整地ロータ50を水田作業装置のフレーム14に対して昇降自在に支持する左支持手段70L、右側の整地ロータ50を水田作業装置のフレーム14に対して昇降自在に支持する右支持手段70Rを設けてある。左支持手段70Lと右支持手段70Rを連動させる連動手段を設け、左側の整地ロータ50を上昇側及び下降側に操作する駆動機構を設けてある。
(もっと読む)
多条苗移植機
【課題】本発明は、走行車体の左右幅よりも広い八条以上の植付幅を有する苗移植機に関し、植付幅が広いことによって生ずる問題点で、苗植付部に吊り下げて設ける整地ロータの左右外側の整地ロータが中央側の整地ロータよりも低くなって整地後の圃場の植付面が均一にならないために、苗の植付深さが均等にならず苗の生育に支障が出る問題点を解決することを課題とする。
【解決手段】走行車体の後部に苗植付部を昇降リンクで昇降可能に設けた多条苗移植機において、苗植付部の整地ロ−タ装置を複数の中央整地ロータ227bと側部整地ロータ227a及び外側整地ロータ227a1で構成し、該整地ロ−タ装置を苗植付部の苗載部支持フレームにそれぞれ吊り下げて設け、少なくとも左右外側整地ロータ227a1の吊り下げ高さを調整可能にしたことを特徴とする多条苗移植機とする。
(もっと読む)
乗用型水田作業機
【課題】接地センサフロートを安定的に作動させるとともに作業機全体としての長さを短く済ませることができ、さらに良好な作業仕上がりを得ることができる乗用型水田作業機でありながら、不適切な対地高さ制御の発生を防止しやすくする。
【解決手段】接地センサフロート12の前端12bが、接地フロート11の前端11bよりも車体前方側に位置している。自走車の後方で、かつ接地センサフロート12と接地フロート11のうちの接地フロート11だけの前側に、車体横向き軸芯Xまわりに回転駆動自在な整地ロータ50を設けてある。整地ロータ50の支持手段70を、水田作業装置のフレーム14aに連結してある。
(もっと読む)
乗用型田植機
【課題】低コストで植付け深さに連動して整地装置の高さ位置を調節する乗用型田植機を提供することを目的とする
【解決手段】植付部15の幅方向に延設された植付部フレーム23の両端には、苗載せ台を支持する支持ステー30,30が立設されており、支持ステー30,30間には連動軸57が回動自在に支持されている。連動軸57には整地ロータ昇降用アクチュエータ54及びフロート遥動角検出ポテンショメータ55が取付けられたモータ・ポテンショベース59が遊嵌されていると共に、整地ロータ昇降用アクチュエータ54の出力ギヤと噛合するセクタギヤ67が固設されている。連繋リンク73が植付け深さが変更されたことに応じてモータ・ポテンショベース59を回動させると、出力ギヤ及びセクタギヤ67の噛合によって連動軸57が回動し、該連動軸57に取付けられた第2連結アーム65及びステー62を介して整地ロータ17が昇降する。
(もっと読む)
水田作業機の排水溝形成装置
【課題】 排水溝を元の地面に対する深さを深く且つ幅広に形成できるようにするとともに、排水溝の土壌の押えを確実にして崩れにくくし、排水溝からの排水を十分に行なうことができるようにして排水効率の向上を図る。
【解決手段】 水田の土壌に対して作物に係る埋設物を埋設する水田作業機に設けられ水田作業機の走行により土壌表面に排水溝を形成する水田作業機の排水溝形成装置Sにおいて、水田作業機に設けられるベース体1と、ベース体1に設けられ水田作業機の走行により移動させられて土壌を押しのけて土壌表面に下地溝を形成する第一作溝体10と、ベース体1の第一作溝体10より走行方向後側に設けられ第一作溝体10により形成された下地溝の土壌を更に押しのけて排水溝に整形する第二作溝体20とを備えて構成した。
(もっと読む)
苗移植機
【課題】ロータ領域で泥水を押し除けて隣接する苗植付条領域に泥水を押し出すことがないようにした苗移植機を提供することである。
【解決手段】走行車体2の後部に昇降自在に設けた複数条分の苗植付具52aを有する苗植付部4に対して昇降自在に、かつ走行車体2の横幅方向に向けて、接地することで地面を整地する整地具27a,27bを配置し、整地具27a,27bの前方に泥波分散用のV字プレート29とを備えた苗移植機であり、V字プレート29で泥水を多く含む圃場内の耕盤であっても整地性が向上する。
(もっと読む)
水田作業機
【課題】 機体の後部に水田作業装置を備え、機体と水田作業装置との間に整地装置を備えた水田作業機において、整地装置が田面の泥を押す状態を少なくする。
【解決手段】 機体の後部に水田作業装置5を備え、機体と水田作業装置5との間に整地装置53を備えて、整地装置53を田面Gに接地する作業位置と田面Gの上方に位置する退避位置とに亘って昇降自在に構成する。水田作業装置5が作業位置に下降駆動され且つ機体が設定距離だけ前進すると、整地装置53を作業位置に下降駆動する下降操作手段を備える。
(もっと読む)
移植機
【課題】機体の外側方に振出されて次植付行程への指標を圃場面に形成する左右一対のサイドマーカの振出しに連動して整地体を左右方向に変位させることが可能な移植機において、利便性及び汎用性が高い移植機を提供することを課題とする。
【解決手段】走行機体3の後方に昇降可能に連結された植付作業機7と、植付作業機7の前方で左右方向に並列され圃場の整地を行う整地体9と、整地体9を左右方向に移動させる移動機構とを備えた移植機において、機体の外側方に振出されて次植付行程への指標を圃場面に形成する左右一対のサイドマーカ11と、整地体9の左右移動及び左右のサイドマーカ11の振出し制御を行う制御部79とを設け、制御部79が整地体9をサイドマーカ11の振出し方向に自動的に変位させるモードと、整地体9をサイドマーカ11の振出し方向とは関係無く左右方向中立位置に位置決め可能なモードとを有する。
(もっと読む)
乗用型田植機
【課題】本発明の課題は、圃場が荒れやすい枕地あるいは枕地近くにおいて適正に整地が行える整地ロータ付きの乗用型田植機を提供することである。また、整地ロータの上下調節及び収納を同じロータ昇降用モータで行って、苗植付作業時に整地ロータを収納位置にしたままで使用できないような不具合を防止できる整地ロータ付きの乗用型田植機を提供することである。
【解決手段】走行車体2の後部に苗植付部4を昇降自在に設けると共に、走行車体2の横幅方向に向けて配置され地面を整地するロータ27a,27bを苗植付部4に対して昇降自在に設けた乗用型田植機において、ロータ27a,27bをロータ昇降用モータ63の作動にて収納状態に自動的に切替え、苗植付作業時にはロータ昇降用モータ63の作動にてロータ27a,27bをロータ高さ調節ダイヤルで設定した高さに自動的に調整する制御装置100を備えた乗用型田植機。
(もっと読む)
苗移植機
【課題】ロータの苗植付部に対する自動昇降制御が可能な対地作業装置付きの苗移植機を提供すること。
【解決手段】畦クラッチレバーセンサ19aが畦クラッチが切り位置にあることを検出するとロータ昇降用モータ63が整地ロータ27a,27bが圃場上で対地作業をする位置に移動されるので、枕地及びその近傍などで、畦クラッチが切りになると、自動的にロータ27a,27bを下降させて整地作業を行わせることができ、圃場内において荒れやすい枕地又は枕地の近くを確実に整地することができる。
(もっと読む)
1 - 20 / 39
[ Back to top ]