
Fターム[2B076BA04]の内容
収穫機本体(機枠、駆動) (12,770) | 機枠、機台に関する目的、効果 (1,380) | 重量バランス、機体水平バランス (80)
Fターム[2B076BA04]に分類される特許
1 - 20 / 80
走行車両
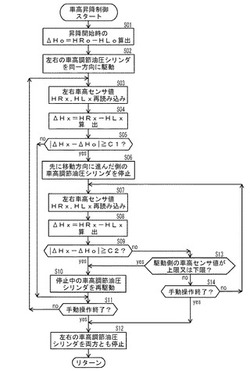
【課題】手動操作によって走行機体の車高を昇降させる場合において、左右のローリングアクチュエータにかかる負荷の大小に拘らず、走行機体の左右傾斜角度をできるだけ一定に維持した状態で、走行機体の車高を昇降できるようにする。
【解決手段】現時点の左右の車高センサ375,376値の差ΔHxと昇降開始時の左右の車高センサ375,376値の差ΔHoとの間の差分の絶対値|ΔHx−ΔHo|が予め設定された第1昇降基準値C1を上回ると、先に移動方向に進んだ側のローリングアクチュエータ38を停止させ、他方のローリングアクチュエータ38の駆動を継続させる。
(もっと読む)
走行車両

【課題】ローリングアクチュエータやピッチングアクチュエータを可動限界まで動作させて走行機体にねじれを生じさせたり、走行機体を極端な姿勢にしたりすることがなく、安定した姿勢制御を実現できる走行車両を提供する。
【解決手段】本願発明の走行車両は、左右の走行部2にて支持された走行機体1と、走行機体1の左右方向の傾斜姿勢を変更するローリングアクチュエータ38と、走行機体1の前後方向の傾斜姿勢を変更するピッチングアクチュエータ177と、各アクチュエータ38,177の駆動を制御するコントローラ371とを備える。コントローラ371には、走行機体1における各走行部2側の姿勢に関する一対の姿勢データML,MRを格納する。コントローラ371は、各アクチュエータ38,177による走行機体1の姿勢変更の可否を両姿勢データML,MRに基づき決定する。
(もっと読む)
コンバインの姿勢制御装置
【課題】本発明は、機体の水平制御に用いられる油圧シリンダを含む機構を機体に対してコンパクトに配置するコンバインの姿勢制御装置を提供する。
【解決手段】機体フレーム2において機体左右方向に配置される軸部17,22に、当該軸部17,22周りに回動しトラックフレーム10を昇降操作する昇降アーム19,24,26と、軸部17,22を回動させて昇降アーム19,24,26を操作する操作アーム18,23とを機体前後のうちの同方向に取り付け、軸部17,22から同方向への操作アーム18,23の長さF1,R1を軸部17,22から同方向への昇降アーム19,24,26の長さF2,R2以下に設定するとともに、操作アーム18,23と機体フレーム2に亘ってピストンロッド28a,29aを下方に出退させて操作アーム18,23を軸部17,22周りに回動させる油圧シリンダ28,29を鉛直方向に配置した。
(もっと読む)
コンバインの刈高さ検出装置及びこの刈高さ検出装置を備えた刈高さ制御装置
【課題】比較的狭いスペースに刈高さ検出装置を設けて、刈取部の前後左右の動きに追従して接地体に前後左右方向から作用する外力で刈高さ検出装置が破損しないようにしたコンバインの刈高さ検出装置及び刈高さ制御装置を提供する。
【解決手段】刈取装置(27)に備えた分草体(42)の下部に上下方向の第一支持軸(1)を設け、この第一支持軸(1)に対して第一支持体(2)を上下スライド自在及び回動自在に取り付け、この第一支持体(2)の後側部に設けた前後方向の第二支持軸(3)に対して第二支持体(4)を回動自在に取り付け、この第二支持体(4)に設けた左右方向の第三支持軸(5)に対して斜め後下方へ延出する接地体(6)の基部を取り付け、この接地体(6)の上下揺動による第三支持軸(5)の回動角度を検出する角度センサ(10)を設けたコンバインの刈高さ検出装置
(もっと読む)
コンバイン
【課題】車体フレームを簡単な構造で十分な強度を有したものとし、ミッションケースとエンジンとの配設位置間の距離を大きくして、前後バランスの安定化を図る。
【解決手段】左右一対のクローラ走行装置2のトラックフレーム20同士を連結するアーチ状の連結部材21を連結してトラックフレーム20を支持する足回り支持フレーム12を車体フレーム1の前端位置の横向き主フレーム11よりも前方側へ突出させて設け、左右の足回り支持フレーム12の前端位置の横向き主フレーム11よりも前方側へ突出した箇所に亘ってミッション支持フレーム13を設けて、このミッション支持フレーム13にミッションケース7を支持させてある。
(もっと読む)
普通型コンバイン
【課題】刈取部への正転駆動力と逆転駆動力とを伝達するための伝動機構を工夫して、機体重心の高くなる傾向を回避することが可能な普通型コンバインを提供する。
【解決手段】刈取正転伝動機構48を、エンジン動力を脱穀装置5に伝達する脱穀駆動系から分岐させた駆動力をフィーダ4Aの動力入力部47に伝える伝動機構によって構成するとともに、走行装置10の駆動系に対する変速機構を内装したミッションケース7に、刈取部4への逆転駆動力を出力する刈取逆転出力部74を設け、刈取逆転伝動機構Aを、刈取逆転出力部74と、その刈取逆転出力部74からフィーダ4Aの動力入力部47への伝動機構24とによって構成した。
(もっと読む)
コンバイン
【課題】車高が低下調節がされた場合にも刈取装置の高さ位置を確保できるコンバインを提供する。
【解決手段】コンバインは、車高調節部11を介して機体フレーム1aを高さ調節可能に支持する走行装置3と、機体フレーム1aの前部の刈取昇降部14を介して昇降調節可能に穀稈を刈取る刈取装置4とを備えて構成され、車高調節部11による調節高さを検出する車高検出部11sと、刈取昇降部14による昇降高さを検出する刈取昇降検出部14sと、前記車高調節部11及び刈取昇降部14の動作を制御する制御部Cとを設け、該制御部Cは、前記車高調節部11への下降出力の開始と前記車高検出部11sによる下降側への高さ変化とのうちの何れかが検出され、且つ、刈取昇降検出部14sによる高さが設定値未満となった場合に、前記刈取昇降検出部14sの検出値が設定値以上となるまで前記刈取昇降部14に上昇出力を行なう構成としたものである。
(もっと読む)
普通型コンバイン
【課題】刈取装置3と、扱胴21を有する脱穀装置9と、オペレータが搭乗する運転部5及び走行部2を有する走行機体1とを備え、前記刈取装置3から前記脱穀装置9にフィーダハウス11を介して穀稈を供給する普通型コンバインにおいて、前記運転部5と前記フィーダハウス11との配置関係を改善して、普通型コンバイン全体の重心バランスを向上させる。
【解決手段】前記フィーダハウス11と前記運転部5とを、前記走行機体1の前部に左右並べて設ける。前記フィーダハウス11と前記脱穀装置9との間に穀稈受継用のビータ18を配置する。前記運転部5の左右一側部を、前記フィーダハウス11及び前記ビータ18の一部にオーバーラップさせる。
(もっと読む)
コンバイン
【課題】
走行車台の左右一側にグレンタンクを、左右他側に脱穀部を搭載し、左右の車体水平制御機構を備えたコンバインにおいて、グレンタンクの重量増加による、湿田等での走行不能状態を回避する。
【解決手段】
脱穀クラッチスイッチ(SW3)及び前記自動水平制御スイッチ(SW1)が入りの状態において、前記グレンタンク(5)搭載側のクローラ走行装置(2)の相対高さ検出手段(SE1)が走行車台(1)に対する当該クローラ走行装置(2)の設定高さ(H)以上の下降を検出した場合に、グレンタンク(5)からの穀粒排出を促すべく報知手段(32)を作動させるコントローラ(31)を設ける。また、設定高さ(H)を設定可能な報知高さ設定手段(SW2)を設ける。
(もっと読む)
普通型コンバイン
【課題】走行機体の前後バランスを向上できるものでありながら、刈取装置または脱穀装置などの駆動構造のメンテナンス作業性などを向上できるようにした普通型コンバインを提供する。
【解決手段】刈取装置3と扱胴21を有する脱穀装置9と、運転座席42を有する走行機体を備え、刈取装置3から脱穀装置9にフィーダハウス及びビータ18を介して穀稈を供給する普通型コンバインにおいて、走行機体の後部にエンジン7を搭載し、扱胴21が軸支された扱胴軸20の後端側にエンジン7の動力を伝達する一方、扱胴軸20の前端側から刈取装置3とビータ18にエンジン7の動力を伝達し、扱胴軸20を介してビータ18を駆動し、ビータ18を介して刈取装置3を駆動するように構成する。
(もっと読む)
コンバイン
【課題】収穫作業中の車台水平制御出力によって、刈取昇降制御装置が地面に突っ込むことを防止する。
【解決手段】車台(11)を支持する左右一対の走行装置(10)に、該走行装置(10)を左右独立して昇降させる昇降機構を設け、車台(11)の前部には刈取前処理装置(13)を刈取昇降シリンダ(19)で昇降自在に設け、該刈取前処理装置(13)の地上高を刈幅方向の複数個所で検出する接地高さセンサ(25)を設け、該接地高さセンサ(25)で検出された地上高に基づいて走行装置(10)の昇降機構を制御して刈取前処理装置(13)を所定の地上高に維持するコンバインにおいて、接地高さセンサ(25)で検出された地上高が予め設定された下限高さ以下となった場合に、走行装置(10)の昇降機構への水平制御指令を停止する構成とする。
(もっと読む)
コンバイン
【課題】搬送車輌への積み降ろし作業などが容易なコンバインを提供する。
【解決手段】作業切替ダイヤルが積載位置に切替えられると、制御部は積載モードへと切替る(タイミングl)。積載モードになると制御部は、エンジンの回転速度を、作業時に使用可能な回転速度域よりも低い設定低回転速度に設定すると共に、車高を最上げ位置に設定する。また、制御部は、前処理部を最下降位置に設定すると共に、ナローガイドも作業位置から収納位置へと切替える。
(もっと読む)
コンバイン
【課題】湿田走行性能を向上できるものでありながら、刈取り性能又は脱穀性能等を低下させることなく、製造コストを低減できるようにしたコンバインを提供しようとするものである。
【解決手段】走行部2及び運転座席42を有する走行機体1と、刈刃15を有する刈取装置3と、扱胴21を有する脱穀装置9と、刈取装置3から脱穀装置9に刈取り穀稈を供給するフィーダハウス11と、各部を駆動するエンジン7と、脱穀装置9の脱粒物を選別する穀粒選別機構10と、穀粒を収集するグレンタンク6を備えた普通型コンバインにおいて、平面視で、機体の前後方向中心線上に、フィーダハウス11と、運転座席42と、扱胴21を配置させたことを特徴とする。
(もっと読む)
コンバインの刈取フローティング装置
【課題】刈取搬送装置を、安定した弾性力で位置保持し、地表面基準で異常振動の発生も少なく、安定した作業走行が行なえるものとする。
【解決手段】走行フレーム(1)の前部に、刈取搬送装置(2)を、支持した刈取バランススプリング装置(3)のスプリング張力を、土壌の接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、いずれか一方の取付位置を、他方に対して遠近方向に自動的に調節してバランススプリング(8)の全長を変更することにより調整する構成とした。また、刈取バランススプリング装置(3)は、そのスプリング張力を、接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、走行フレーム(1)側の取付位置か、又は刈取搬送装置(2)側の取付位置のいずれか一方を、他方の取付位置に対して上下方向に取付位置を自動的に調節して前記バランススプリング(8)の全長を変更して調整する構成とした。
(もっと読む)
コンバイン
【課題】走行機体1の左右又は前後の傾斜角度の初期設定基準値(機体水平値)を簡単に認識でき、走行機体1の左右方向又は前後方向の傾斜姿勢を、走行状況等に対処して俊敏に変更できるように従来技術を改良した走行車両を提供するものである。
【解決手段】エンジン14が搭載された走行機体1に、左右又は前後の複数本の油圧シリンダ38又は177を介して、左右の走行部2を設け、走行機体1の左右及び前後の傾斜角度を変更させるコンバインにおいて、走行機体1の左右又は前後の傾斜角度の少なくともいずれか一方が初期設定基準値(機体水平値)に戻ったときに、油圧シリンダ38又は177を一旦停止させるように構成したものである。
(もっと読む)
コンバインの姿勢安定装置
【課題】コンバインの走行フレーム上の重量変化を検出して実際に走行フレームが傾く前にバランス装置を作動させて機体の重心位置が変化しないようにすることで、機体の前後左右の水平を維持して、脱穀装置の選別性能を良好に維持する。
【解決手段】コンバインの走行フレーム(1)上に備えたグレンタンク(2)との機体中心対称位置に、二次元的に移動可能なバランスウエイト(3)を備えたバランス装置(4)を設け、グレンタンク(2)内に設ける穀粒センサ(S1,S2,S3,S4)の穀粒溜まり具合の検出結果に基づいて、グレンタンク(2)内の穀粒が増加しても機体全体の重心位置が変化しないように前記バランス装置(4)を作動させる構成とする。
(もっと読む)
クローラ走行作業車
【課題】簡単な構成で揺動リンクの支持箇所に対する強度を高め、少ない部品点数で加工工数も少なく、かつ構成部材の大型化を避けながら高強度の揺動リンク支持構造を備えたクローラ走行作業車を得る。
【解決手段】前後一対の揺動リンク11,12を介してクローラ走行装置1Lを昇降自在に支持させ、横連結フレーム21を左右のメインフレーム20の存在箇所よりも機体横外側へ延出し、この横連結フレーム21の機体横外側への延出箇所と左右の各メインフレーム20とにわたって、揺動リンク11,12の揺動支点となる枢支部が形成された支持ブラケット3を取り付けてある。
(もっと読む)
コンバイン
【課題】走行機体1の傾斜姿勢が自動的に修正されることを利用して、穀物タン7ク内の穀粒の質量を高精度で計測でき、穀粒の質量の計測誤差を簡単に低減できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3及び脱穀装置5及び穀物タンク7を装設した走行機体1と、走行機体1の左右方向又は前後方向の傾斜姿勢を修正する傾斜姿勢アクチュエータとしての車高調節油圧シリンダ38又は前後傾斜用油圧シリンダ177と、穀物タンク7の質量を計測する計量手段としての計量器399を備えるコンバインにおいて、走行機体1の左右方向又は前後方向の傾斜姿勢が自動的に修正されることによって、走行機体1が水平姿勢に維持されているときに、計量器399によって穀物タンク7の質量が計測されるように構成したことを特徴とする。
(もっと読む)
コンバイン
【課題】穀粒貯留部に必要容量を備えさせながら、横幅が小であり、かつ安定面で優れた状態に得ることができるコンバインを提供する。
【解決手段】左右一対のクローラ走行装置1,1のうちの穀粒貯留部5に近い側のクローラ走行装置1における接地輪21での左右中心21Cと穀粒貯留部5の機体左右方向外側端5aとの間隔D2を、左右一対のクローラ走行装置1,1のうちの脱穀装置4に近い側のクローラ走行装置1における接地輪21での左右中心21Cと脱穀装置4の機体左右方向外側端4bとの間隔D1よりも小に設定してある。
(もっと読む)
コンバイン
【課題】簡便な構造で実現することができる3つ以上の対地高さ検出用ソリ体を備えたコンバインを提供する。
【解決手段】コンバイン150は、複数の対地高さ検出用ソリ体36L、36C、36Rに刈取部4を横断する状態で各支軸40L、40C、40Rをそれぞれ連設し、少なくとも支軸40L、40Cを内外層の同軸構成とし、かつ該支軸の各左軸端に前記対地高さ検出用ソリ体36L、36Rとポテンショメータ52L、52Cとを連動連結する複数の連動リンク機構75L、75Cを設けた。また、右支軸40Rの右軸端に対地高さ検出用ソリ体36Rとポテンショメータ52Rと連動連結する連動リンク機構75Rを設けた。
(もっと読む)
1 - 20 / 80
[ Back to top ]