
Fターム[2B304LA08]の内容
Fターム[2B304LA08]に分類される特許
1 - 20 / 32
多目的機
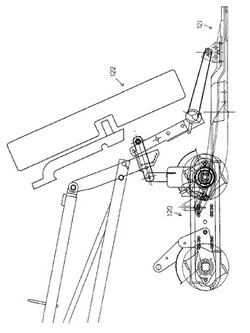
【課題】 本発明の課題は、苗移植機と播種機を含む複数種の作業機を選択的に装着できる多目的機の汎用性を高めることである。
【解決手段】 走行車体の後端部に昇降リンクを設け、苗移植機と播種機を含む複数種の作業機を選択的に装着するべく、前記作業機を着脱可能な着脱ヒッチを昇降リンクの先端部に設けた多目的機において、ロータ部(120)を着脱ヒッチよりも走行車体側に設けた多目的機とした。
また、排水溝を形成する排水用の作溝器を、上下方向に回動するアームの回動先端部に設け、アームを回動付勢する作溝器押圧スプリングを設け、作溝器押圧スプリングを操作して排水用の作溝器の圃場への押し付け荷重を変更する排水用作溝器上下用モータを設け、昇降制御における制御感度又は圃場の硬軟の検知結果に連動して、排水用作溝器上下用モータの作動を制御する制御部を設け、アームと一体のスタンドを設けた多目的機とした。
(もっと読む)
作業機

【課題】複数の表示装置を備えていても、表示装置の種類(機種)や仕様の変更を容易に行うことができる作業機を提供する。
【解決手段】トラクタ2は、検出器で検出した状態を表示可能な複数の表示装置(メータパネル30及び液晶モニタ80)と、該複数の表示装置がCAN通信網Nを介して接続されると共に検出器が接続され、且つ検出器で検出された状態を示す検出情報を複数の表示装置に出力するメインECU50と、を備える。メインECU50は、検出情報を表示させる表示装置を識別するための識別情報を出力する識別情報出力手段52と、該検出情報を出力する検出情報出力手段51とを有する。複数の表示装置は、識別情報によって指定されたときに、検出情報出力手段51によって出力された検出情報を表示する。
(もっと読む)
作業車両
【課題】昇降可能に装架した苗植付部や播種機等の作業装置の上昇操作を忘れた場合においても、機体後進による作溝機の詰まりや破損等の事態を招くことなく、圃場作業を円滑に進めることができる作業車両を提供する。
【解決手段】苗移植機は、作業装置4を昇降自在に支持するリンク機構およびその昇降位置検知部材と、作業装置4に設けた作溝器に粒状体を供給する粒状体供給装置5と、前後進の車速選択とリンク機構の支持高さ調節とを行う走行操作レバー73およびその走行操作検知部材73Sと、後輪回転検知部材と、報知部材71と、作業装置4に配置された報知停止スイッチ72とを走行車体に備えて構成され、リンク機構が所定高さ以下、走行操作レバー73が後進車速位置、後輪11が回転の3条件全てに該当した時に、報知停止スイッチ72の操作まで報知部材71を作動する制御を構成したものである。
(もっと読む)
苗移植機
【課題】
後輪ローリング機構をシリンダで制御して、植付作業時や旋回作業時に機体の走行姿勢が作業に適した形態となる姿勢制御装置を設けた苗移植機を提供する。
【解決手段】
車体4の後部に中央回動軸42を中心に左右方向に回動するローリング機枠41を設け、ローリング機枠41の両端部に後輪3,3に回転駆動力を供給する後輪伝動ケース8,8を設け、ローリング機枠41を回動させる回動アクチュエータ9を設け、ハンドル1の操舵角度を検出する操舵角度検出部材7を設け、操舵角度検出部材7の検出した操舵角度から旋回内側を判別して回動アクチュエータ9を伸張または収縮させて車体4の旋回内側が低位となる側にローリング機枠41を回動させて傾斜姿勢にする構成とした。
(もっと読む)
苗移植機
【課題】作業条件等に拘らず、苗植付部の苗取出口へ適正な苗量(苗本数)を精度良く供給し、適正な苗量で圃場に苗を植え付けることができる苗移植機を提供すること。
【解決手段】植付昇降操作部材(ノブ33又はレバー32)を上昇位置に移動させると制御装置200がエンジン回転数を上げ、油圧ポンプ29から油圧昇降シリンダ76への送油量を増やすため、該シリンダ76への送油が停滞しにくくなり苗植付部4の上昇操作が円滑に行われ、苗植付部4の上昇が遅れて走行車体2の旋回時に苗植付部4の下部が圃場面に接触することを防止でき、シリンダ76への送油量が増えることにより、シリンダ76の伸びる速さやシリンダ76を伸ばす力も増大するので、苗植付部4に積載された苗の重量にかかわらず苗植付部4を速やかに上昇させることができる。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のための設定等が携帯電話を利用することで、より簡単に行える農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、携帯電話2は、携帯電話2のボタンを利用して作業機3のための設定を行う設定機能と、設定機能による設定情報を送信する送信機能とを有し、作業機3は、作業機3に設けられた出力機器と、携帯電話2から設定情報を受信する受信部と、出力機器の操作を行う操作表示部70と、受信部が受信した設定情報と操作表示部70からの操作信号に基づき出力機器を制御する制御部5とを有する。
(もっと読む)
乗用型水田作業機
【課題】回転駆動自在な整地ロータによる整地を行わせるものでありながら、水田作業装置の不適切な対地高さ制御の発生を回避しやすく、かつ整地ロータの昇降操作を構造簡単に行うことができる乗用型水田作業機を提供する。
【解決手段】接地センサフロート12の左側及び右側に、回転駆動自在な整地ロータ50を設けてある。左側の整地ロータ50と右側の整地ロータ50とに各別に動力伝達する一対の伝動手段60,60を設けてある。左側の整地ロータ50を水田作業装置のフレーム14に対して昇降自在に支持する左支持手段70L、右側の整地ロータ50を水田作業装置のフレーム14に対して昇降自在に支持する右支持手段70Rを設けてある。左支持手段70Lと右支持手段70Rを連動させる連動手段を設け、左側の整地ロータ50を上昇側及び下降側に操作する駆動機構を設けてある。
(もっと読む)
多目的小型電動式トラクター
【課題】畑作農作業のほとんどを機械化でき、密閉された空間でも作業が可能な多目的小型電動式トラクターと、ユニット化した小型農機具を提供する。
【解決手段】多目的小型電動式トラクター1は、荷物及び各農機具ユニットを載せる荷台8を有し、荷台8を載せる車体フレーム2にはロボットアーム10が設けられている。一対の駆動前輪3a、3bと一対の前輪駆動モータ4a、4bと一対のフリー回転の後輪9a、9bを有し、車体フレーム2に搭載されているウィンチワイヤー巻き取りドラム11と、ドラム駆動するモータ12を有している。荷台8は小型農機具ユニットを搭載して、荷台高さ調整モータ5で上下に移動可能になっている。ロボットアーム10は360度回転可能で3箇所に関節が設けられ、手首は360度回転可能で物体を挟むことが出来る。また手首部分は取り外し可能で、別種の農具を付け替えることが出来る。
(もっと読む)
農作業機
【課題】走行中は作溝器が不用意に圃場に作溝跡を作って、圃場を荒らさないようにした農作業機を提供すること。
【解決手段】ハンドル操向角度検出センサ109によりハンドル14が所定値まで操向操作されると制御装置110により、まず作溝器用油圧シリンダ89が作溝位置にある作溝器(溝切り装置)95を非作溝位置まで上昇させ、次いで播種装置用油圧シリンダ46を作動させて作業位置にある播種装置82を非作業位置まで上昇させ、また旋回終了直前又は旋回終了を判断すると、まず播種装置82が作業位置まで下降させ、次いで作溝器95を作溝位置まで下降する作動を行わせることで、作溝器95を播種装置82より先に上昇させて、また上昇した作溝器95を播種装置82より後で圃場に降ろすことで、圃場を荒らしたり、作物を傷めたりすることを防止できる。
(もっと読む)
多目的農作業機
【課題】直播装置82と苗植付部4などトラクタ本体に装着可能な装置側に高価なセンサを設置することなくローリング制御ができる多目的農作業機を提供すること。
【解決手段】 走行車体2の後部に複数条分の種子を圃場に播くための直播装置82又は複数条分の苗を圃場に植え付けるための苗植付部4を車体2に対して昇降自在に且つ着脱自在に設け、車体2の後部に圃場面を整地するロータ27,27をロータ昇降リンク66を介して設け、該ロータ昇降リンク66に水平センサ81aを取り付けたので、作業装置を取り替えても前記左右傾斜センサ81aを利用することができる。
(もっと読む)
走行車両
【課題】 本発明は、機体が小回り旋回性を維持しながら、旋回後半には旋回後のための位置合わせが容易に行えるようにすることを課題とする。
【解決手段】 ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して旋回内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して旋回内側のサイドクラッチを常時入状態にする旋回連動機構と、走行車体の旋回中において、前輪の向きが操舵状態から直進状態側へ戻されるのを旋回角度センサが検出するのに連動して、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更し、以降、前輪が直進状態へ戻るまで前記入状態の割合を小さく変更しない制御装置を備えた走行車両とした。
(もっと読む)
直播機
【課題】硬軟センサの設置位置を工夫することにより、苗植付深さ又は播種深さの制御度合いを高めた直播機を提供すること。
【解決手段】走行車体2の後部に複数条分の種子を圃場に移送する移送管93,95を備えた直播装置82と移送管93,95の種子排出口を圃場上に向けて保持するフロート55,56を走行車体に対して油圧シリンダ46とリンク装置3により昇降自在に設け、フロート55,56の前方に接地して地面を整地するロータ27a,27bを直播装置82に対して昇降自在に設け、フロート55,56とロータ27a,27bの間に圃場の硬軟センサ114を設け、該センサ114の検出値に応じて油圧シリンダ46を伸縮して直播装置82の播種深さを調節する制御装置101を設けている。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
田植機
【課題】 走行機体の後部に苗植付け装置を昇降可能に連結するとともに、苗植付け装置における植付け部位の前方に整地装置を配備してある田植機において、深植え傾向になることを回避するとともに、苗植付け装置を前後に短いものにして機体方向転換などを容易に行えるようにする。
【解決手段】 苗植付け装置5を、整地フロートを備えないものに構成するとともに、整地装置16の前方に苗植付け装置5の田面に対する高さを検知する高さ検出機構26を配備し、高さ検出機構26の検出情報に基づいて苗植付け装置5を昇降制御する制御手段を備えてある。
(もっと読む)
農作業機用モータ稼動状況通知システム
【課題】トラクタに装着して農作業する農作業機に設置されているモータの稼動状況を的確に確認可能とする農作業機用モータ稼動状況通知システムを提供することを目的とする。
【解決手段】ハーネス24、29のモータ4近傍に分岐点25、30を設け、分岐点25、30から分岐される別ハーネス26、32によりモータ4と並列に接続される通知デバイス6と、分岐点25、30より電源側にハーネス24に直列に接続されたヒューズ23とを有することにより上記課題を解決する。
(もっと読む)
水田作業機
【課題】 機体の後部に水田作業装置を支持し、対地作業装置を水田作業装置に昇降自在に支持した水田作業機において、対地作業装置に左右方向から負荷が掛かっても、対地作業装置が左右方向に移動し難いように構成する。
【解決手段】 対地作業装置54の右側部及び左側部の上方の水田作業装置の部分で、対地作業装置54の右側部及び左側部よりも左右中央側の水田作業装置の部分に、昇降機構71,77を備える。対地作業装置54の右及び左側部と昇降機構71,77とに亘って連係部材72を接続して、昇降機構71,77により連係部材72を上方及び下方に移動駆動することにより対地作業装置54を昇降駆動する。農用供給体を貯留する貯留部と繰り出し部とを機体に備え、農用供給体を田面に供給する供給部を水田作業装置に備えて、繰り出し部と供給部とに亘って接続される搬送ホース22を、連係部材72と水田作業装置との間に配置する。
(もっと読む)
施肥機
【課題】偶数個の肥料吐出口を備える施肥機において、実際の施肥条数よりも多くの肥料吐出部を設けることなく、回行毎の旋回半径を略同一にする。
【解決手段】走行機体1と、該走行機体1の後部に連結される施肥作業機3とを備え、該施肥作業機3に、左右方向に所定の間隔を存して並ぶ偶数個の肥料吐出口5aを設け、作物条に沿った走行機体1の往復回行に伴い、作物条間に肥料を追肥する施肥機において、偶数個の肥料吐出口5aを、左右方向に1条間分だけ移動可能に構成し、回行時に偶数個の肥料吐出口5aを回行外側又は回行内側に1条間分だけ移動させることにより、回行毎の旋回半径を略同一にする。
(もっと読む)
作業車
【課題】 作業車において、操作制御が適切なタイミングで行われるように構成する。
【解決手段】 車輪の回転数に基づいて機体の走行距離を検出する走行距離検出手段と、作業地に対する車輪のスリップ率を検出するスリップ率検出手段とを備える。走行距離検出手段で検出された機体の走行距離と、スリップ率検出手段で検出された車輪のスリップ率とに基づいて、操作制御を行う操作制御手段を備える。
(もっと読む)
作業車
【課題】 作業車において、操作制御が適切なタイミングで行われるように構成する。
【解決手段】 車輪の回転数に基づいて機体の走行距離を検出する走行距離検出手段と、操向操作自在な車輪の操向角度を検出する操向角度検出手段とを備える。走行距離検出手段で検出された機体の走行距離と、操向角度検出手段で検出された車輪の操向角度とに基づいて、操作制御を行う操作制御手段を備える。
(もっと読む)
農作業機用制御装置
【課題】トラクタの種類に合わせて制御ユニットを交換する必要がない農作業機用制御装置を提供する。
【解決手段】農作業機用制御装置8は、トラクタ1の信号出力部4に電気的に接続した車速信号変換ユニット11と、車速信号変換ユニット11に電気的に接続した制御ユニット12とを備える。車速信号変換ユニット11は、トラクタ1の種類に応じて異なる車速信号を入力し、この入力した車速信号を1種類の共通車速信号に変換して出力する。制御ユニット12は、車速信号変換ユニット11からの共通車速信号を入力し、この入力した共通車速信号に応じて作業部7を制御する。
(もっと読む)
1 - 20 / 32
[ Back to top ]