
Fターム[2B304RA30]の内容
農作業機用昇降装置 (9,026) | 主要構成、被制御機器 (505) | その他 (20)
Fターム[2B304RA30]に分類される特許
1 - 20 / 20
乗用移植機
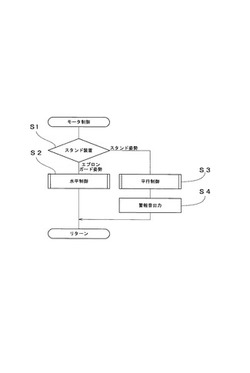
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
作業機のアンロード装置

【課題】油圧アクチュエータの停止時に油圧ポンプからの圧油を切換弁によってアンロード油路に流出させる作業機のアンロード装置を安価に得る。
【解決手段】切換弁102の背圧室から排油路104に圧油排出させる開き状態と圧油排出を停止する閉じ状態とに切り換え自在な開閉弁105、開閉弁105をパイロット油圧によって切り換え操作する制御弁107を備えてある。アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を駆動するべく操作されると、制御弁107が開閉弁105を閉じ状態に切り換え操作し、アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を停止するべく操作されると、制御弁107が開閉弁105を開き状態に切り換え操作する。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 苗移植作業装置を上昇させると共に走行距離算出手段にて走行距離の算出を開始し、該走行距離に応じて、先ず苗移植作業装置が下降する指令を出力し、その後、前記走行距離に応じて、線引きマーカ(195)が下降する指令を出力する制御装置(170)を設けた。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
トラクタ
【課題】耕耘作業時に急な車速変化が行われた場合や、枕地の耕耘作業を開始する場合に、圃場面の仕上がりが悪くなることを抑制するトラクタを提供することを目的とする。
【解決手段】ロータリ耕耘装置30を昇降させて耕深を予め設定した目標耕深に追従させる耕深制御により耕耘作業を行うトラクタ1において、車速が規定値以上変化した場合は、規定距離A又は規定時間Bが経過するまでは、前記耕深制御による前記ロータリ耕耘装置30の昇降を制限するものである。詳細には、ロータリ耕耘装置30の昇降を禁止する、または、耕深制御のゲインを小さくする、または、耕深制御の不感帯を大きくする、または、耕深制御の目標耕深を耕深側に補正するものである。
(もっと読む)
農作業機の操作給電システム
【課題】トラクタに装着して農作業を行う作業機をトラクタから脱着する際に、操作及び給電のためのハーネスの取り付け、取り外しが不要となる農作業機の操作給電システムを提供することを目的とする。
【解決手段】トラクタ1に装着して農作業を行いトラクタ1と脱着可能な作業機2と、トラクタ1側に設置される送信部16と、作業機2に設置される受信部22とを有し、操作部10からの操作情報を、送信部16と受信部22の間で無線送信して作業機2側に送信し、トラクタ1に有する電源11からの電力を、送信部16と受信部22の間でワイヤレスで電力伝送して作業機2側へ送る。
(もっと読む)
作業車両
【課題】オペレータが作業中に昇降制御や姿勢制御が確実に行われていることを確認できるようにすると共に、昇降制御や姿勢制御における感度調節のための参考情報を容易に得られるようにする。
【解決手段】昇降制御、或いは姿勢制御を行うアクチュエータ24,32に対して伸張指令が出されているか、縮小指令が出されているか、又は制御不能な状態にあるか否か等を、座席に座ったオペレータが目視可能なセンターピラー9bに設ける表示ユニット57を介してオペレータに表示する。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、操作パネル100、101、102上の操作スイッチを操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチの操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作ボックス10は、作業機の異なる機種に対応した複数の操作パネル100、101、102を有し、複数の操作パネル100、101、102は、操作ボックス10を構成する筐体の異なる面に設置されている。
(もっと読む)
農作業機の無線操作システム
【課題】トラクタに装着して農作業を行う作業機が有する出力機器を携帯電話により操作可能な農作業機の無線操作システムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、作業機3は、作業機3のための出力機器40と、携帯電話2からの無線操作信号を受信する受信部11と、受信した操作信号に基づき出力機器40を制御する制御部12とを有し、携帯電話2は、携帯電話2が有するボタン30により出力機器40の操作が可能であり、ボタン30による操作方法は、作業機3の機種に合わせて変更可能であることにより上記課題を解決する。
(もっと読む)
作業車両
【課題】作業車両において、作業機を昇降させることのできるフィンガーレバーを利用した左右操舵装置、及びウインカ点滅を可能にする。
【解決手段】ステアリングハンドルの近傍に一回の操作で作業機を昇降させることのできるフィンガーレバー、該フィンガーレバーの昇降操作検出用のフィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチ、及び、チエックヒューズを設け、旋回切れ角センサの故障時には前記チエックヒューズを取り外すと緊急操舵モードに移行し、前記フィンガーレバーの昇降操作に基づく前記フィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチの検出信号により、前記旋回切れ角センサの検出値を無視して前記旋回駆動手段、前記操舵装置を作動させて左右操舵するコントローラを設けたことを特徴とする作業車両とする。
(もっと読む)
農作業機用無線受信制御装置及び農作業機用リモコン装置
【課題】無線受信制御装置の電源スイッチを入れたときにいきなり農作業機の動作が実行される可能性をなくし、安全性を高めることができる農作業機用無線受信制御装置及び農作業機用リモコン装置を提供する。
【解決手段】農作業機用無線受信制御装置70は、走行機体の後部に装着される農作業機に設けられ、農作業機の動作を指令する操作指令を無線信号によって指令するリモコン装置60からの信号を受信し、リモコン装置に返信の信号を送る通信手段と、通信手段によって受信された信号に従って農作業機の作動を制御する制御手段を備え、電源スイッチをオンしたときに、リモコン装置からの信号が受信圏内に存在するときには、自動的に制御手段への電力の供給を遮断する電源停止制御手段200aを備える。
(もっと読む)
農作業機用リモコン装置
【課題】電源を入れたと同時に、操作者が意図しない農作業機の動作が実行される可能性をなくすことができる農作業機用リモコン装置を提供する。
【解決手段】農作業機用リモコン装置60は、電源スイッチ210がオン状態のとき、指令信号を搬送するための電波を送信し、各指令スイッチがオンされたとき指令信号データに基づいて指令信号を電波に載せて送信する通信手段223と、各指令スイッチがオンされたとき指令信号データを記憶手段222から読み込み、指令信号データを通信手段223に送る制御手段221を備え、通信手段223は、電源スイッチ210が入れられた立ち上げ時には、各指令スイッチを操作するときに出力する電波の強度よりも小さい強度で出力する制御を行う出力制御手段226を備える。
(もっと読む)
無線受信制御装置
【課題】走行機体に搭乗した作業者が操作する無線指令装置からの指令信号を確実に受信し、装置内部への水の浸入を防止可能な無線受信制御装置を提供する。
【解決手段】走行機体の後部に装着される耕耘作業機1に設けられ、耕耘作業機1に搭乗した作業者が操作する無線指令装置から送信される無線方式の指令信号を受信しこの信号に応じて耕耘作業機1の作動を制御する無線受信制御装置70であり、耕耘作業機1に設けられた取付板71と、内部に形成された収容凹部の開口部が取付板71に面して塞がれた状態で取付板71に設けられた制御ボックス82と、収容凹部内に収容され、無線指令装置からの指令信号を受信するアンテナが基板上に形成された電子基板100を備え、制御ボックス82は、耕耘作業機1の作業姿勢時において、電子基板100が耕耘作業機1に搭乗した作業者側を向いて取付板71に設けられる。
(もっと読む)
作業車輌の傾斜制御装置
【課題】静電容量の変化により走行機体の傾斜を検出する傾斜センサは、温度ドリフトがあり、高い精度による傾斜制御を妨げる原因になっている。
【解決手段】傾斜センサの複数の温度ドリフト特性A,B,C…を予め格納しておき、搭載センサに応じて、上記複数の特性から1つを選択する。作業機を水平にして、上記選択した温度ドリフト特性の0点電圧を、その測定時温度(例えば25℃)と共に記憶し、使用時の温度(例えば50℃)との差並びに上記選択した特性で、使用時のセンサの0点電圧(基準値)を補正する。該補正したセンサの検出値に基づき、作業機の左右傾斜姿勢を制御する。
(もっと読む)
作業車両搭載用制御装置
【課題】制御手段210,213,281,282の組み付け工程において、作業車両1の各搭載箇所に対して、誤ったプログラム書き込み済制御手段を取り付けてしまう人的ミスを回避できるようにする。
【解決手段】各制御手段210,213,281,282を作業車両1に組み付けた状態において、各制御手段210,213,281,282にその固有情報に応じた識別子を設定する。通信バス280に接続された外部端末290から識別子毎の制御プログラムを読み出して、識別子の一致する制御手段210,213,281,282にインストールするように構成する。
(もっと読む)
苗植機
【課題】 苗植機のバックリフト制御において、エンジン回転を高くするのは、後進変速であるから、急速にエンジン回転が上げられて危険性を伴ったり、燃料消費を大きくして不経済となり易い。このようなバックリフト制御において、走行安全を図り、無駄を少くするものである。
【解決手段】 車体の後進走行操作によってエンジンの回転数を上げて苗植装置を上昇するバックリフト制御を行わせる苗植機において、この苗植装置が既に上昇位置にあるときは、前記エンジンの回転数の上昇を規制する。
(もっと読む)
作業車両
【課題】傾斜センサや加速度センサは高価な備品であり、できればそのような高価な備品を使用しないで作業機を適切に操縦できる走行車両を提供すること。
【解決手段】一対の後輪3,3の上部を覆う左右後部フェンダ21,21またはその近傍にそれぞれGPSアンテナ20L,20Rを装着し、また走行車両の前方のカビネットの天井部にもGPSアンテナ20Fを装着し、アンテナ20L,20Rにより、またはアンテナ20L,20R,20Fにより走行車両の左右方向又は前後方向の傾斜度合いをGPSとの送受信で検出でき、作業機の水平制御などを行うので、その制御の精度が優れたものとなり、高価な角速度センサをはじめ、作業機姿勢制御用の各種センサが不要になる。
(もっと読む)
水田作業機
【課題】 機体の後部に水田作業装置を支持し、対地作業装置を水田作業装置に昇降自在に支持した水田作業機において、対地作業装置に左右方向から負荷が掛かっても、対地作業装置が左右方向に移動し難いように構成する。
【解決手段】 対地作業装置54の右側部及び左側部の上方の水田作業装置の部分で、対地作業装置54の右側部及び左側部よりも左右中央側の水田作業装置の部分に、昇降機構71,77を備える。対地作業装置54の右及び左側部と昇降機構71,77とに亘って連係部材72を接続して、昇降機構71,77により連係部材72を上方及び下方に移動駆動することにより対地作業装置54を昇降駆動する。農用供給体を貯留する貯留部と繰り出し部とを機体に備え、農用供給体を田面に供給する供給部を水田作業装置に備えて、繰り出し部と供給部とに亘って接続される搬送ホース22を、連係部材72と水田作業装置との間に配置する。
(もっと読む)
田植機における植付苗量制御方法及び装置
【課題】田面に植え付けられた苗を検出して植付苗量を制御することが可能な田植機における植付苗量制御方法及び装置を提供する。
【解決手段】苗使用量検出器14(ロータリエンコーダ14e)と植付苗検出装置15(光センサからなる前後部センサ15b、15c)との検出値に基づいて、苗植付け体10により田面に植え付けられた苗の使用量、苗が植付けられた面積、苗植付け株間、田植機1の走行速度を算出し、当該算出値に応じて予め設定した苗マット枚数で所定の面積を植付けるように、苗植付け体10による苗の取出し量を増減させる制御装置23を備えるようにする。
(もっと読む)
三次元測位システムを利用した均平作業機と均平工法
【課題】
高低差のある圃場等の区画を、牽引車両に牽引される均平機を用いて均一平面にする方法において従来はレーザ光を基準にして、均平板に土を抱えられる程度に高さを保持し、土を抱えなくなったら徐々に均平板を下げることを繰り返しながら均一にしていた。その結果最後まで均一高さにならず、均平作業後半で低い部分があった場合には、全体から広く薄く運土せねばならず非効率的であった。また、オペレータは常に後方を振り返り均平板の土の様子を見ながら作業せねばならず危険であった。
【解決手段】
本願は均平作業前に圃場高さを測定し、均平にしたときの均平基準面高さを算出し、基準高さと比較した高低マップを運転席に表示し、均平作業中もリアルタイムに測定し高低マップを書き換え、効率的に作業を行えるようにしたものである。
(もっと読む)
1 - 20 / 20
[ Back to top ]