
Fターム[3C007CY03]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | エネルギー供給 (611) | 流体供給 (66)
Fターム[3C007CY03]に分類される特許
1 - 20 / 66
ワーク搬送装置
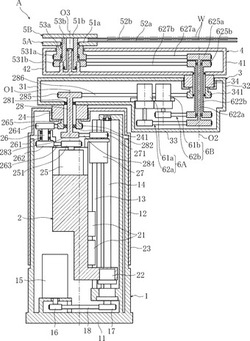
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
塗装ロボット及び塗装システム

【課題】塗装ブースを小型化することが可能な塗装ロボット及び塗装システムを提供する。また、ケーブルを覆うケーブル保護部材を省略することが可能な塗装ロボット及び塗装システムを提供する。
【解決手段】 塗装ロボット50は、塗装ブース20の側壁22に固定される固定部62と、固定部62に対して旋回可能に設けられる旋回部64と、旋回部64に設けられるアーム66と、アーム66の先端部に設けられる塗装ガン68と、を備え、側壁22に固定される固定部62の固定面120に、ケーブル92a、92bを引き込むケーブル引込部112a、112bが設けられる。
(もっと読む)
作業ツール用線条体の配索方法及び配索装置
【課題】ロボットの動作制限を解消しつつ実施する作業種類の制約を抑制できる作業ツール用線条体の配索方法及び配索装置を提供する。
【解決手段】ツールスタンド3に待機保持され且つロボット4の手首に選択的に着脱される作業ツールTと作業ツール用制御盤5とを接続する配線及び配管の少なくとも一方を含む線条体としてのケーブルガイド7の配索装置である。前記ツールスタンド3に回転可能に配置され前記作業ツールTに先端を接続した線条体の中途部を巻掛け保持する回転ドラム8を備える。そして、前記回転ドラム8に巻掛けた線条体の後端側に対して下方へ牽引力を付与して、前記作業ツールTの移動に伴い回転ドラム8の前方に引出される線条体に対して予め設定した引張り力を付与する付勢手段としてのスプリングバランサ12を備える。
(もっと読む)
産業用ロボット内部の線条体の配線方法
【課題】線条体を産業用ロボット外部に露出させることなく産業用ロボット内部に配線することができ、かつメンテナンス時に線条体を容易に交換することが可能な、産業用ロボット内部の線条体の配線方法を提供する。
【解決手段】まず、基端側線条部材21の一端21aを基台11に接続し、基端側線条部材21の他端21bを、基台11から第1の収納室12を通って、第1のロボット腕13まで配線する。次に、先端側線条部材22の一端22aを、第1のロボット腕13から第2の収納室14を通って第2のロボット腕15まで配線し、さらに先端側線条部材22の一端22aを手首部16に接続する。その後、基端側線条部材21の他端21bと、先端側線条部材22の他端22bとをコネクタ23によって接続する。
(もっと読む)
スカラロボット
【課題】アームの上下のデッドスペースを低減したスカラロボットを得ること。
【解決手段】ベース10と、第1関節軸を介して水平面内で回動可能にベース10に連結された第1アーム1と、第2関節軸を介して水平面内で回動可能に第1アーム1に連結された第2アーム2と、第2アーム2の先端部に上下動するように設置された先端軸4とを備えたスカラロボットであって、ケーブル15を収容してベース10と第1アーム1との間に架け渡された第1ケーブルダクト11及びケーブル15を収容して第1アーム1と第2アーム2との間に架け渡された第2ケーブルダクト12を備え、第1、第2ケーブルダクト11、12の一端は第1、第2関節軸上に位置しており、第1及び第2ケーブルダクト11、12は、上下方向に関して先端軸4の可動域上下動の範囲内に収まるように設置された。
(もっと読む)
ロボット手首部の線条体配設機構
【課題】線条体と周辺機器等との干渉を効率的に回避しつつ、簡易な構成で高剛性化された線条体配設機構を提供する。
【解決手段】線条体配設機構は、手首先端部に取り付けられる第1板状部材(36)と、第1板状部材に対向配置される第2板状部材(38)と、第1板状部材と第2板状部材を互いに連結する連結部材(40)とから構成される案内部材(28)を有し、連結部材の手首軸に垂直な断面における断面形状は、手首軸を含むとともに、手首軸から第1の半径方向に線条体の断面方向長さの1/2以上延び、かつ第1の半径方向と軸対称の第2の半径方向に該断面方向長さの1/2以下延び、案内部材が予め定めた回転角度範囲内のいずれの回転角度位置にあっても、線条体が第2板状部材及び連結部材の一方又は双方に当接するように配設される。
(もっと読む)
ロボットアーム部の線条体配設機構
【課題】案内部材等を使用せずとも、線条体と周辺機器等との接触や干渉を効率的に回避できるロボットアーム部の線条体配設機構を提供する。
【解決手段】線条体配設機構は、非回転部に取り付けられ、線条体(14)が摺動不能に固定される第1固定部材(24)と、回転部(22)と一体に回転可能に構成され、線条体が摺動不能に固定される第2固定部材(25)とを有し、回転部が長手軸線(18)回りの回転動作範囲の中心位置にあるときに、第1固定部材は、第1接線方向に線条体が方向付けられるように配置され、第2固定部材は、第1接線に略垂直な第2接線方向に線条体が方向付けられるよう配置され、かつ長手軸線を含み第2接線に平行な境界面によって画定される2つの領域について、両固定部材は同じ領域に存在するように配置される。
(もっと読む)
産業用ロボット
【課題】本発明は、揺動アームと、揺動アームに回転軸を介して取り付けられるツール取付回転アームとを備えた産業用ロボットに関し、ツール取付部に気体を供給する流通路の外部構造物への干渉を防止できる産業用ロボットを提供することを課題とする。
【解決手段】本発明は、ツール取付部170に駆動用の気体を供給する流通路200を、ロボットベース110から旋回フレーム120、チューブ220、ショルダ140、揺動アーム150、ツール取付回転アーム160の内部を通ってツール取付部170まで配置したことを特徴とする
(もっと読む)
ロボットのアーム連結装置
【課題】小型化を図るとともに関節の可動範囲を拡大することができるロボットのアーム連結装置を提供する。
【解決手段】ロータリジョイント37は、ハウジング10に固定されたスリーブ17の円筒内に回転可能な状態で挿入されたシャフト15を介して駆動源12の回転力を第2の上アーム6に伝達するとともに、第1の上アーム5側から供給される圧縮空気をスリーブ17とシャフト15との間に設けられた空気通路を通じて第2の上アーム6側に排出する。回転関節用配線装置20は、スリーブ17の外周を囲むように設けられた筒状をなすケース41と、ケース41の内周に沿ってスパイラル状に緩く巻かれた状態で収容されたフラットケーブル42とから構成される。第1の上アーム5側から供給される電気信号は、回転関節用配線装置20のフラットケーブル42を通じて第2の上アーム6側へと伝達される。
(もっと読む)
溶接用ロボット
【課題】ワイヤ送給機と溶接用トーチとを接続する一線式パワーケーブルの耐久性及び溶接ワイヤの送給性の向上を図ることができる溶接用ロボットを提供する。
【解決手段】アッパアーム支持体15がロアアーム13の先端部に片持ち支持され、ワイヤ送給機30がアッパアーム支持体15の基端部又はロアアーム13に回転自在に取り付けられている。また、基台11に設けられた第1軸減速機に中空部が形成され、コンジットケーブル39の他端が基台11の基端部から挿入して第1軸減速機の中空部と旋回ベース12とを挿通してワイヤ送給機30に接続されている。この結果、一線式パワーケーブル50の耐久性及び溶接ワイヤの送給性の向上を図ることができる。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
線状対象物の配管・配線構造、ロボットの作業ヘッドおよび多関節ロボット
【課題】本発明は、特別な配管・配線スペースを必要とすることなく、正逆回転する中空作動軸に挿通した線状対象物の破損を有効に防止することができる線状対象物の配管・配線構造、ロボットの作業ヘッドおよび多関節ロボットを提供することである。
【解決手段】チューブ17およびケーブル16の少なくとも一方であるケーブル類18を、軸線周りに所定の角度正逆回転する中空作動軸12の中空部に挿通すると共に、中空作動軸12の一方の軸端側において回転不能となるように相対的に固定とし、他方の軸端側において中空作動軸12と同期回転するように相対的に可動としたケーブル類18の配管・配線構造であって、中空作動軸12の内壁とケーブル類18との間に介設され、ケーブル類18を囲繞するように保持すると共に、軸線周りに捻り変形自在な筒状プロテクター61を備えたものである。
(もっと読む)
ロボット用信号伝達装置およびそれを備えたロボット
【課題】省スペースのロボット用信号伝達装置を提供する。
【解決手段】ロボットのエンドエフェクター50へ信号伝達を行うロボット用信号伝達装置60であって、アーム18と、光導波路を備える光伝送路62と、前記アーム18と前記エンドエフェクター50とのそれぞれに設けられ前記光伝送路62を介して互いに光通信する光通信手段と、前記エンドエフェクター50を動作させる駆動機構40と、を備え、前記駆動機構40は、前記エンドエフェクター50を回転および昇降させる中空部30aを有する作業軸30と、前記エンドエフェクター50を動作させる気体を送風もしくは吸引するフレキシブルチューブと、を有し、前記光導波路は、前記フレキシブルチューブに沿って設けられ、前記フレキシブルチューブは、前記作業軸30の前記中空部30aに収容されている。
(もっと読む)
遠隔操作型加工ロボット
【課題】 遠隔操作型アクチュエータを正確な位置に支持することができ、かつ遠隔操作型アクチュエータは細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で変更することができる遠隔操作型加工ロボットを提供する。
【解決手段】 遠隔操作型アクチュエータ80とその支持装置81とでなる。遠隔操作型アクチュエータ80は、細長形状のスピンドルガイド部3と、このスピンドルガイド部3の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材2と、スピンドルガイド部の基端が結合された駆動部ハウジング4aとを備える。先端部材2は、工具1を保持するスピンドルを回転自在に支持する。支持装置81は、ベース部82に対して遠隔操作型アクチュエータ80が1方向の自由度を持つ1自由度機構、または2自由度以上の自由度を持つ多自由度機構からなる。自由度機構を駆動する駆動源84b,87a,89aを設ける。
(もっと読む)
特にロボット工学のための多軸継手、継手アセンブリおよびロボット工学のためのキット
【課題】特にロボット工学のための多軸継手(1)を提供する。
【解決手段】多軸継手は、回転軸(P)を備えた少なくとも1つの回転ピボット継手(26)とピボット継手(26)と直列に接続されかつ回転軸(P)に垂直に延在する旋回軸(R)を有する少なくとも1つの回転スイベル継手(13)とを介して互いに軸回転可能かつ旋回可能に接続された遠位継手部(2)と近位継手部(4)とを含む。そのような多軸継手を用いて2自由度を実現化することが可能である。小型の構造形状を得るために、ピボット継手(26)とスイベル継手(13)とは、互いの中に摺動されることによって合体されて、構造ユニットを形成する。多軸継手(1)は、動物またはヒトの関節の運動をシミュレートするために牽引手段を介した操作を可能にすることを特に意図されている。大きな力を吸収するために、分岐された構造(28)が選択されてもよい。
(もっと読む)
内圧防爆構造のロボット
【課題】内圧防爆構造を有しながらも、また塗装ガンなど手首部先端のエンドエフェクタに接続される配管を有しながらも、コンパクトなロボットを提供すること
【解決手段】第1アーム64と第2アーム65とが互いに相対回転する関節部において、一端が危険雰囲気に開口し、第1アーム64の気密室37c内を通り、関節部の回転軸73を含むよう第1アーム64に固定された第1パイプ57と、一端が第1パイプ57に連通し、第2アーム65の気密室37d内を通り、他端が危険雰囲気に開口するよう第2アーム65に固定された第2パイプ59と、第1と第2アームの気密室を危険雰囲気からシールする第1シール部材55と、第1と第2パイプが互いに相対回転する部分をシールする第2シール部材58と、を備え、第1と第2パイプ内にエンドエフェクタへ接続されるチューブ68類が配線されるようにした。
(もっと読む)
産業用ロボット
【課題】第1のアーム3や第2のアーム5の回動範囲を360°の範囲とすることのできる産業用ロボットを提供する。
【解決手段】第1の関節軸2、第2の関節軸4、作業軸6を中空に形成するとともに、第2のアーム駆動用モータ9の回転トルクを第2の関節軸4に伝える第1の中空プーリ軸25と第1のエンドエフェクタ駆動用モータ10の回転トルクを作業軸6に伝える第2の中空プーリ軸37を第1の関節軸2の内側に同軸に配置し、かつエンドエフェクタに空気を供給するための給気用環状空間とエンドエフェクタから空気を排気するための排気用環状空間とを第1の関節軸2と第2の中空プーリ軸37との間に同心円状に形成した。
(もっと読む)
ワーク搬送装置
【課題】輻射熱を受けやすい部材から効率よく熱を逃すことができるワーク搬送装置を提供する。
【解決手段】ワークを搬送するためのワーク搬送機構を備えたワーク搬送装置であって、ワーク搬送機構の外表面各所には、冷媒循環用の冷却パイプ84が付設されており、冷却パイプ84は、上記外表面に対して弾性部材85を挟んだ状態で固定具86を介して押圧固定されている。
(もっと読む)
ワーク搬送装置
【課題】 装置全体の小型化を図り、製造設備のダウンサイジングに貢献することができるワーク搬送装置を提供する。
【解決手段】 ワーク搬送装置A1は、ワークを水平方向に往復移動させるハンド機構8と、ハンド機構8を鉛直方向に昇降させるシザースリフト機構4と、シザースリフト機構4を搭載する台座2と、台座2を鉛直軸周りに回転させる回転機構とを備えている。第1のシザースリンク41の下端部から中間部にかけては、下部配管が付設されているとともに、第2のシザースリンク42の上端部から中間部にかけては、上部配管5が付設されており、かつ、第1および第2のシザースリンクの中間部同士の間には、下部配管7および上部配管5に連通するように中間配管6が接続されている。
(もっと読む)
ロボットハンド
【課題】チャックの開閉を検出するセンサに接続される電線の断線の可能性を低減させるロボットハンドを提供する。
【解決手段】ロボットハンドは、産業用ロボットのアームに装着されるハンド本体部31と、ハンド本体部31に接続されるとともに、被把持物を把持するチャック4の取付けが可能なハンド先端部32とを備え、ハンド先端部32は、チャック4に設けられ当該チャック4の動作を検出可能なセンサSNに電線84を介して接続される副プリント基板64を有し、ハンド本体部31は、副プリント基板64と電気的に接続される主プリント基板61を有している。
(もっと読む)
1 - 20 / 66
[ Back to top ]