
Fターム[3C007EV01]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352)
Fターム[3C007EV01]の下位に属するFターム
平面接触 (57)
V型 (40)
曲面接触 (26)
下面当接 (63)
トング (13)
係合(凹凸係合、フランジ縁係合等) (51)
ローラを有するもの (25)
ネジ (2)
摩擦力増大のための処置 (58)
Fターム[3C007EV01]に分類される特許
1 - 17 / 17
把持搬送装置
【課題】接触センサ自体が、周囲の物体との干渉要因になり難いようにするとともに、複数の把持爪で対象物を把持する時に、当該対象物もしくはこれの周囲にある物体と当該把持爪との接触を検出できるようにする。
【解決手段】対象物を把持する複数の把持爪3と、把持爪3を動作可能に保持して移動する保持移動体5と、物体との接触を検出する接触センサ7とを備える。接触センサ7は、その一部が把持爪3の内部に配置されるように把持爪3の先端部に組み込まれている。
(もっと読む)
ロボットハンドのフィンガ構造

【課題】部品Pを複数のフィンガ72により把持するロボットハンド7において、あまりコストのかからない簡単な構造で所要の把持性能が安定して得られ、十分な耐久性を確保できるとともに、狭隘な環境下でも使用しやすい優れた構造のフィンガ72を提供する。
【解決手段】複数のフィンガ72のそれぞれにコイルばね81を巻き付け、その両端を除いた中間部分の巻き線をフィンガ72の外周に沿って長手方向に変位可能に取り付ける。こうすると、それらのフィンガ72によって取り囲むように部品Pを把持したときに接触点Cの数が増大する可能性があり、個々の接触点における摩擦力はあまり大きくなくとも、部品Pを安定して把持することができる。部品Pの寸法、形状等に応じてコイルばね81の巻き線の太さやピッチを選定することが好ましい。
(もっと読む)
ロボットハンド
【課題】種々の対象物を容易に取り扱うことができるロボットハンドを提供する。
【解決手段】可動部2を移動させて可動部2の物体接触面Pを対象物に接触させ、スライドアクチュエータ13を作動させてピストン11をシリンダ9内に所定量だけ押し込み、シリンダ9内に貯留されていた水を供給管10を介して液体供給口8から物体接触面P上に供給する。これにより、水の表面張力に起因して物体接触面Pの摩擦係数が変化し、種々の対象物を取り扱うことが可能となる。物体接触面Pの摩擦係数を元に戻す場合には、可動部2の物体接触面Pに超音波振動を発生させ、この超音波振動によって物体接触面Pに残った水分を霧化蒸発させる。
(もっと読む)
ホルダ
【課題】加工対象を、固定点又は他の加工対象に対して位置決めをするとともに位置決めした状態で固定するための、高強度、高精度、及び軽量なホルダを提供すること。
【解決手段】加工対象を、位置決めをするとともに位置決めした状態で固定するためのホルダ(1)であって、加工対象の固定具又は装置を搭載するための、又は該ホルダをロボットに固定するための1以上の固定手段(2、3)を含む。該ホルダ(1)は内側用の、互いに結合された、平板状で薄い、いくつかの内側材料部品(7、13、14)と、外側用の、互いに結合されかつ内側材料部品とも結合された、平板状で薄い、いくつかの外側材料部品(8)とから構成され、これらは互いに閉じた空間を形成し、そして材料部品同士の結合は機械的結合具(9、10、11)及び/又は接着結合により結合されている。ホルダの製造方法は、1以上の固定板(2、3)を備える工程を含む。この方法はさらに、薄い平板状の材料から平板状の内側用(12、13、14)及び外側用(8)の材料部品を切り出す工程と、ホルダ(1)を組み立てる工程と、を含み、該内側材料部品(7、13、14)は互いに結合されるとともに外側材料部品とも結合され、該外側材料部品により取り囲まれ、これらは閉じた空間を形成するように配列され、材料部品間の結合は機械的結合具(9,10,11)及び/又は接着結合によりなされている。
(もっと読む)
半導体ウェーハ用のクランプ治具
【課題】 フィラーが露出して半導体ウェーハを切削したり、フィラーが脱落してパーティクルを発生させるのを抑制できる半導体ウェーハ用のクランプ治具を提供する。
【解決手段】 半導体ウェーハWの直径以上の長さを有するクランプ板1を備え、クランプ板1の半導体ウェーハWに接触する複数の接触領域をダイヤモンドライクカーボン10によりそれぞれ被覆して耐汚染性、耐食性、耐摩耗性を向上させる。接触領域であるクランプチップ5にダイヤモンドライクカーボン10を皮膜として生成し、カーボンファイバーの端部が露出したり、短いカーボンファイバーが脱落するのを防止するとともに、導電性、耐食性、耐磨耗性等を付与するので、アウトガスや低分子不純物の移行を低減したり、最近の回路の微細化要求を満たしながら半導体ウェーハWの汚染を有効に抑制することができる。
(もっと読む)
ナノピンセットおよびその製造方法
【課題】汚れにくいナノピンセットの提供。
【解決手段】ナノピンセット1は、開閉自在な一対のアーム3と、アーム3の各々に形成された試料把持部3aと、各アーム3の少なくとも試料把持部3aを含む領域に形成された撥水性膜とを備えることを特徴とする。撥水性膜には、例えば、導電性を有する撥水性膜や化学吸着単分子膜が用いられる。
(もっと読む)
ロボットハンド
【課題】クランパの耐久性を高めると共に、段取り替えも不要として作業効率を向上させる。
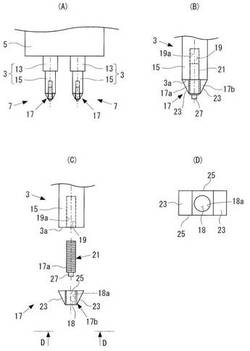
【解決手段】ロボットハンド1における各クランパ6の前端に設けられる平面鋭角状の把持爪12の先端には、前面13から傾斜面14にかけて斜めに面取部が形成されて、面取部と傾斜面14とがなす平面角θが略90度となる当接部16を形成している。一方、クランパ6,6の間でベース2の前面には、一対の当接体18,18によって平面V字状の受部19を形成し、成型品取り出しの際には湯口部分22の周面に当接して把持爪12,12による湯口部分22の把持位置を位置決めする位置決め部材17が設けられている。
(もっと読む)
チャック装置
【課題】チャック爪が把持動作を行うチャック動作時のダミーピンとチャックとのカジリ発生を防止して、チャック動作を繰り返し確実で滑らかに行うことができるチャック装置を提供すること。
【解決手段】チャック本体1にチャック爪2が軸方向に移動可能に支持され、チャック爪2の軸方向移動に連動して縮径および拡径を行いチャック爪2の先端部にワークWを把持および解放するチャック装置であって、チャック爪2がワークWを把持する際に、チャック爪2の根元で把持可能なダミーピン4をチャック本体1に上下に移動可能に支持した。
(もっと読む)
物品拾い上げ装置
【課題】確実かつ容易に水没した物品を拾い上げる。
【解決手段】物品拾い上げ装置2は、アウターチューブ3の内部に芯線4が進退動自在に収容された可撓性を有するワイヤ5と、このワイヤ5の一端に設けられた掴み部6と、このワイヤ5に遊びを持たせて緩装された案内部7と、ワイヤ5の他端に設けられ芯線4を介して掴み部6を開閉動作させる操作部8とを備えている。掴み部6は、本体10に固定された固定爪11と、本体10に枢支さればね15により常時閉状態に弾発付勢されるとともに芯線4に接続され、開閉動作される可動爪14とを備えている。操作部8は、握り枠30と、両端がこの握り枠30の内側に形成された案内溝33、33に係止され案内溝33、33に沿って進退動するとともに芯線4に接続される操作ロッド34とを備えている。
(もっと読む)
搬送装置
【課題】多関節指機構を持つ搬送装置において、多関節指機構の負担を増大させることなく、搬送物を多様な移動軌跡で移動させる。
【解決手段】搬送される搬送物33に接する搬送板32と、搬送板32表面に対して垂直軸周りの回転方向の振動を発生させる回転方向振動部34と、搬送板32表面に対して平行方向の振動を発生する各平行方向振動部35、36と、搬送板32表面に対して垂直方向の振動を発生する垂直方向振動部37とを備えている。各振動部34〜37は、搬送板32表面に対して垂直方向に積み重ねられている。搬送板32表面には、回転方向の振動、X方向の振動、Y方向の振動、及びZ方向の振動を合成してなる振動が生じる。
(もっと読む)
往復旋回によるロボットハンドの把持装置
【課題】塵埃等の問題もない往復旋回によるロボットのワーク把持装置を提供する。
【解決手段】角柱枠1の中心部に駆動歯車軸6が回転できるように形成し、下面部には、角柱枠1の駆動歯車軸6の下部に取り付けられた歯車7にかみ合わせた歯車8A,8B,8Cを3等配に配置し、該歯車8A,8B,8Cに取り付けた旋回軸9A,9B,9Cにシールド形軸受け15A,15B,15Cと防塵シール16A,16B,16Cを挿入できるように形成した下フタ10を角柱枠1にネジで取り付け、該旋回軸9A,9B,9Cを下フタ10下面より突出させて、該旋回軸9A,9B,9Cの下部にフインガー12A,12B,12Cを固着した腕11A,11B,11Cを取り付け、駆動歯車軸6を往復回転させることにより、同時にフインガー12A,12B,12Cも旋回してワーク50を把持、開放する。
(もっと読む)
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】フィンガー部101の先端が閉じた状態(a)において、回転部材230を一方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423によって、フィンガー部101の屈曲部335が内側に向かって押される。圧縮ばね501の付勢力に逆らって、回転部材230をそのまま回転をさせていくと、フィンガー部101の後端は閉じていき、フィンガー部101の先端は開いていく。一方、フィンガー部101の先端が開いている状態(b)において、回転部材230を他方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423に追従して、フィンガー部101の屈曲部335が外側に向かって移動する。回転部材230をそのまま回転させていくと、フィンガー部101の後端は開いていき、フィンガー部101の先端は閉じていく。
(もっと読む)
ワークの把持機構およびそれを用いた把持システム
【課題】 把持機構が備える各部分の動きを小さくすることにより小型化が可能になるワークの把持機構およびそれを用いた把持システムを提供すること。
【解決手段】 把持爪26を備えたハンドベース部23と、他方の把持爪28を備えたクランプアーム24と、クランプアーム24を連動させた状態でハンドベース部23の基端側と先端側との間を移動して把持爪28を把持爪26に対して進退させる楔ブロック25とで把持機構20を構成した。そして、ハンドベース部23に前部ガイド溝27aを設け、クランプアーム24に前部ガイドピン39aを設けた。また、ハンドベース部23に後部ガイド溝27bを設け、クランプアーム24に後部ガイドピン39bを設けた。また、楔ブロック25に楔ガイド溝25aを設けてクランプアーム24を回転させることにより、把持爪28を把持爪26に押圧できるようにした。
(もっと読む)
ハンド及びハンドリングロボット
【課題】 エンドエフェクタとしてのハンドにおいて、属性が異なる種々の物体を安定して把持できるとともに、様々な姿勢で置かれた物体を容易に取り出せるようにする。
【解決手段】 ハンド10は、基部12と、基部12に関連して設けられ、物体を引掛けて持ち上げることができるフック要素14と、基部12に関連して設けられ、フック要素14と協働して物体を挟持する挟持要素16と、フック要素14と挟持要素16とを相対的に移動させる駆動部18とを備えて構成される。フック要素14は、基部12上で挟持要素16に対し接近及び離反する方向へ移動可能に設置される。把持動作に際しては、最初にフック要素14に物体を引掛けて持ち上げ、その物体を、フック要素14上で重力の作用によりハンド10に対し特定の相対位置に自動的に移行させた後に、フック要素14を駆動して挟持要素16に物体を押し付けて挟持する。
(もっと読む)
ワーク保持装置
【課題】 構造を簡略化でき、かつ小型化、軽量化を図ることができるワーク保持装置を提供する。
【解決手段】 ワーク40をワーク保持装置1で保持するときには、まず、アーム2を動かしてワーク保持体10を下方へと降下させ、ワーク支持棒20の先端をワーク40の挿入孔40B内に挿入する。次に、エアシリンダ30を伸長させることにより、ワーク支持棒20を傾動させ、この状態でワーク保持体10を引き上げる。ここで、ワーク支持棒20は挿入孔40Bの軸線に対して斜めに傾いているため、ワーク40の挿入孔40Bをワーク支持棒20の外周面に引っ掛けるようにしてワーク40を保持することができる。
(もっと読む)
把持装置
【課題】 ガラス基板等の薄板状ワークを把持して搬送を行う把持装置において、複数のワークを搬送するのにサイクルタイムを短くすることのできる把持装置を提供する。
【解決手段】 ベースに固定された2本のフォーク2と、ベースの左右に固定した2個の位置決めシリンダ3と、フォークの根本に固定されたクランプシリンダ4と、クランプシリンダに連結されるとともにフォーク先端でガイドされた連結棒6と、位置決めシリンダおよび連結棒に固定された2対のクランプ部材8と、クランプシリンダの動作を規制するストローク規制部材10をピストン先端に固定したストッパシリンダ5より構成される把持装置であり、クランプシリンダのストロークをストローク規制部材が規制するとともに、ストッパシリンダの動きにより把持位置を2箇所に制限した把持装置を構成する。
(もっと読む)
爪状体、及び作業ロボット用ハンド装置
【課題】ワーク及びワーク以外の把持対象物を把持する毎に行っていた爪状体の交換作業の手間を省く。
【解決手段】ワーク及びアタッチメントを把持するための爪状体31を、一対の指状体21の左右対称位置である第1内面部と第3内面部との2箇所に1つずつ計4つ取り付ける。各爪状体31を、指状体21の幅と略等しい寸法となる長さMの細長板のベース板部76を備えて形成する。各ベース板部76に、特にワークを把持するため、円柱形状体に対する把持力を集中させるための第1爪部77を、その両端の2箇所に1つずつ一体的に設ける。各ベース板部76の中央に、特にアタッチメント80を固定するため、両側の第1爪部77の突設高さよりも低く形成された第2爪部78を、1つずつ一体的に設ける。
(もっと読む)
1 - 17 / 17
[ Back to top ]