
Fターム[3C007KV04]の内容
マニピュレータ、ロボット (46,145) | センサの方式 (946) | 電気式(例;静電容量) (195)
Fターム[3C007KV04]の下位に属するFターム
スイッチ(例;リミットスイッチ) (34)
歪ゲージ、感圧抵抗体 (93)
Fターム[3C007KV04]に分類される特許
1 - 20 / 68
水平多関節ロボット
【課題】角速度センサーを用いて制振制御を行う水平多関節ロボットにおいて、該角速度センサーに接続される電気配線の耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、第2水平アーム15に設置され基台11に対する第1水平アーム12の角速度を得るための角速度センサー30を備え、第1水平アーム12の角速度に基づく第1モーター13の駆動によって第1水平アーム12を制振する。ロボット10は、基台11と第2水平アーム15とに端部が連結されるとともに、第1水平アーム12の外側、且つ第2水平アーム15の外側に配設されて、基台11内と第2水平アーム15内とに通じる通路を有する配線ダクト33に、第2水平アーム15に内蔵された第2モーター16に接続される電気配線35と、角速度センサー30に接続される電気配線36とが引き回されている。
(もっと読む)
水平多関節ロボット及び水平多関節ロボットの制御方法

【課題】制振制御に用いられる角速度センサーの数を低減するとともに該角速度センサーに接続される電気配線に要求される耐久性を低くした水平多関節ロボット及び水平多関節ロボットの制御方法を提供する。
【解決手段】ロボットは、基台に連結される第1水平アームと、第1水平アームを介して前記基台に連結される第2水平アーム15と、各アームを回転させる第1及び第2モーター13,16と、各モーターの回転角度及び回転速度を算出するための第1及び第2エンコーダー13E,16Eとを有している。第1モーター制御部43は、角速度センサー30が検出したセンサー角速度ωA2から第1及び第2エンコーダー13E,16Eに基づく第1及び第2角速度ωA1m,ωA2mを減算し、演算結果である振動角速度ωA1sに基づく振動速度V1sと第1回転速度V1fbとの加算した速度計測値が速度指令Vcとなるように第1モーター13を制御する。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム
【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
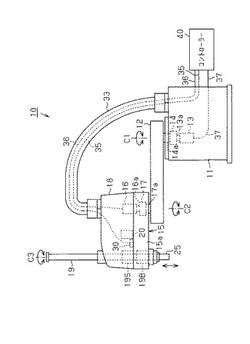
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、測定圧を一定にして計測精度をより向上できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11Aに対し、他方の電極12Aが、所要の間隔を保ちつつスライド可能に配されたセンサー部10Aと、両電極11A、12Aに関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて計測情報を出力する計測情報出力回路50と、一方の電極11Aが固定される基部20と、ワークに対して接離動可能に設けられてワークに当接されるチャック用可動爪部30Aと、チャック用可動爪部材30Aに乗った状態で付勢部材39によってワークへの当接方向へ付勢されると共にその付勢部材39の付勢力に抗して後退可能に配されたワークへの計測用接触部37を備え、且つ他方の電極12が一体の計測用可動部材36とを具備する。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
自動溶接装置における溶接トーチ位置決め方法
【課題】 枝管が傾いていても、溶接個所に対する溶接トーチの角度を一定にする。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。枝管溶接機4の溶接トーチ11の先端より突出する溶接ワイヤ15の先端を、現実の空間の或る1点に保持してロボットのマスタリングを行い、枝管溶接機4について、その点を原点Oとし且つ溶接トーチ11の円周動作の軸心位置に座標軸を備えたツール座標系16を設定する。ツール座標系16における溶接トーチ11の円周動作の軸心位置に対応する座標軸を、センシングにより検出された母管1に仮付けした枝管2の鉛直方向からの傾きに一致させる座標変換を行った後、馬蹄型ガイド5を溶接対象の枝管2に外嵌させて、溶接トーチ11の円周動作の軸心方向を、枝管2の軸心方向に一致させる。
(もっと読む)
静電容量型センサおよびセンサ取付構造
【課題】柔軟で、荷重の測定レンジが広い静電容量型センサを提供することを課題とする。
【解決手段】静電容量型センサ5は、エラストマー製であって、積層方向のばね定数が異なる複数の誘電層500、501が積層されてなる誘電体50と、誘電体50の表側に配置され、エラストマーと、エラストマーに充填される導電性フィラーと、を有する表側電極01X〜12Xと、誘電体50の裏側に配置され、エラストマーと、エラストマーに充填される導電性フィラーと、を有する裏側電極01Y〜12Yと、を備える。
(もっと読む)
力検出機能をもった駆動装置
【課題】駆動機能と力検出機能を備えた装置の構造単純化を図る。
【解決手段】基板100と基板200を、Z軸が中心軸となるように、XY平面に平行に配置する。4本のリニアアクチュエータP10〜P40を、X軸の正側および負側、Y軸の正側および負側にそれぞれ配置し、その上下両端を、転がり球面軸受Q10〜Q40、R10〜R40を介して各基板に接続する。各基板の中心には、接続部材P50を配置し、上端を転がり球面軸受Q50を介して基板100に接続し、下端を基板200に固着する。P10〜P40を伸縮駆動することにより、上方基板100をX軸/Y軸まわりに回転駆動させる。可撓性導電膜201〜204と、基板300上の固定電極E10〜E40とによって容量素子が構成され、その静電容量値の変化に基づいて、基板100に作用したX軸/Y軸まわりのモーメントMx,Myを検出する。
(もっと読む)
力検出機能をもった駆動装置
【課題】駆動機能と力検出機能を備えた装置の構造単純化/薄型化を図る。
【解決手段】上方基板15と下方基板25との間に、2本のリニアアクチュエータU1,U2を、互いに逆方向に傾斜するように配置する。アクチュエータU1,U2の上端は、上方膜部11,12を介して上方基板15に接続され、下端は、導電性の下方膜部21,22を介して下方基板25に接続される。上方基板15に右方向の力が作用して右方へスライドすると、U1は寝る方向へ傾いて下方膜部21は上方へ変形し、U2は立つ方向へ傾いて下方膜部22は下方へ変形する。下方膜部21と電極E5による容量素子と、下方膜部22と電極E6による容量素子との容量値の差により、X軸方向の力検出を行う。両容量値の和により、Z軸方向の力検出もできる。アクチュエータU1,U2を伸縮駆動すれば、上方基板15を移動させたり回転させたりできる。
(もっと読む)
相関性評価方法、相関性評価装置、動作再現装置
【課題】力に関する複数の収集データの相関性を適切に評価することが可能な相関性評価方法、及び装置等を提供すること。
【解決手段】人が特定の物体に対して所定の動作をする際に加えられる力を複数回計測するステップと、前記計測された力の時系列データを複数個、記憶手段に格納するステップと、前記記憶手段に格納された力の時系列データを標本とし、該時系列データ間の相関性を示す値で重み付けした隣接行列を求めるステップと、前記隣接行列を正規化した正規化隣接行列を求めるステップと、前記正規化隣接行列の固有値が1となる場合の固有ベクトルの要素の大きさに基づいて、該要素に対応する時系列データの他のデータとの相関性を評価するステップと、を備えることを特徴とする相関性評価方法。
(もっと読む)
電子部品把持装置及び電子部品検査装置
【課題】電子部品を載置するトレイなどの高さを適宜自動的に測定することのできる電子部品把持装置及び電子部品検査装置を提供する。
【解決手段】供給側ロボットハンドユニット20は、電荷を拡散させる材料からなるトレイに載置されたICチップを把持部32を当接させて把持する当接装置20Aと、当接装置20Aをトレイに対して上下方向に駆動制御する制御手段とを備える。把持部32は当接装置20Aにて独立した導電性を有するとともに、電荷の拡散に基づいて電荷を拡散させる部材との当接を検出する当接検出装置40が接続され、制御手段は、電荷を付与された把持部32をトレイに下降させ、把持部32のトレイへの当接を検出したとき、把持部32の上下方向の位置を測定する。
(もっと読む)
ロボット指アセンブリ
【課題】ロボット指アセンブリを提供すること。
【解決手段】ロボット手が、第1、第2、および第3の指骨を有する指を備える。第1の関節が、ベース構造体に対して第1の指骨を回転自在に連結する。第2の関節が、第2の指骨に対して第1の指骨を回転自在に連結する。第3の関節が、第2の指骨に対して第3の指骨を回転自在に連結する。第2の関節および第3の関節は、第2の指骨に対する第3の指骨の位置が第1の指骨に対する第2の指骨の位置によって決定されるように、運動学的にリンクされる。
(もっと読む)
接触検出装置及びロボット
【課題】外部から加えられる力に対する接触センサの耐久性を従来よりも高めること。
【解決手段】ロボットに対する物体の接触を検出する接触検出装置であって、ベース層51と、ベース層51上に積層されると共に、少なくとも部分的に粗面を有する抵抗層52と、抵抗層52上に積層されると共に、抵抗層52の粗面に対応する粗面を有する抵抗層54と、ベース層51上に積層されると共に、抵抗層52、54間に層間空間を形成するスペーサ層53と、を備え、抵抗層52、54間の間隔は、抵抗層52、54の少なくとも一方の変形時、抵抗層52の粗面と抵抗層54の粗面間に摩擦が生じるように設定されている。この構成を採用することによって、外部から加えられる力に対する接触センサの耐久性を従来よりも高めることができる。
(もっと読む)
触覚センサー装置およびそれを用いたロボット
【課題】より正確な力の検出が可能な触覚センサー装置およびそれを用いた構造が簡単で小型のロボットを得ること。
【解決手段】触覚センサー81,82の検出期間がそれぞれ異なるので、他の触覚センサー81または82の振動の伝達による検出時のSN比の低下を抑えることができる。したがって、より正確な力の検出が可能な触覚センサー装置1000を得ることができる。また、触覚センサー81,82を順次駆動するので配線が少なくてすみ、前述の効果を備え、構造が簡単で小型のロボット100を得ることができる。
(もっと読む)
自動作業システムにおける位置ズレ補正方法及び位置ズレ補正プログラム
【課題】位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレを検出して補正する。
【解決手段】アームの先端部位に保持ツール105及び慣性センサ106を具備する位置決めロボット100と、アームの先端部位に作業ツール205を具備する作業ロボット200と、ロボット制御装置300と、を有した自動作業システムにおいて、位置決めロボット100によりワークを保持した保持ツール105をワークの作業位置に応じた保持ツール105の位置決め基準位置P0に搬送して位置決めするとともに、作業ロボット200により当該ワークに対し所定の作業を行う際、ロボット制御装置300は、慣性センサ106の慣性力に基づいて保持ツール105の位置決め基準位置P0からの位置ズレ量ΔP1を検出し、検出した位置ズレ量ΔP1に基づいて保持ツール105の位置決め基準位置を位置ズレ前の位置P0に補正する。
(もっと読む)
ワーク加工装置とその制御方法
【課題】鋳鉄等の硬い材質のワークを加工する場合に、衝撃的な加工反力が発生しても加工精度を維持しかつ工具の破損等を防止することができるワーク加工装置とその制御方法を提供する。
【解決手段】3次元的に移動可能なロボットハンド4に取り付けられ、これに作用する外力を検出する力センサ12と、力センサに取り付けられワーク1の外面を倣う倣い部材15を有する倣い治具14と、倣い治具に取り付けられワークを加工する加工工具16と、倣い治具のワーク外面に対する倣い治具押付力Fallを予想される加工反力Rの最大値よりも大きい値に力制御する加工制御装置20とを備える。倣い部材14でワーク1の外面を倣いながら倣い治具14をワークの外面に沿って移動し、加工工具16によりワーク1を加工する。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、計測精度を向上できると共に、安価に製造できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11に対し、他方の電極12が、所要の間隔を保ちつつスライド可能に配されたセンサー部10と、両電極11、12に関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて一方の電極11に対する他方の電極12の変位に関する計測情報を出力する計測情報出力回路50と、一方の電極11が固定されると共に、計測と同時に保持されるべきワークの一端側に当接されるストッパ部22を有するチャック用基部20と、他方の電極12が装着されて一体となってストッパ部22に対して接離動可能に設けられ、前記ワークの他端側に当接されるチャック用可動爪部30とを備える。
(もっと読む)
ワークピックアップ装置及び方法
【課題】把持手段をワークに適切に吸着させることができるワークピックアップ装置を提供すること。
【解決手段】ワークピックアップ装置1は、サーボシリンダ11を待機位置から下降させる下降手段21と、バキュームカップ13がブランク15を押圧する力に対応する物理量を検出する検出手段22と、検出した物理量と基準となる物理量とを比較する比較手段23と、比較結果に基づき、サーボシリンダ11を下降させるか停止させるかを制御する停止制御手段と、を含む。
(もっと読む)
多指ハンドおよびロボット並びに多指ハンドの把持方法
【課題】物体の形状に影響されることなく物体を傷付けることなく最適な力で把持できるようにした多指ハンドおよびロボット並びに多指ハンドの把持方法を提供する。
【解決手段】物体を把持する多指ハンドであり、指部に設けられた物体との相対位置を検出した検出結果に応じて駆動部を制御する制御手段と、指先と物体との接触状態を調整する手段とを備え、指部の先端部に設けた少なくとも2つの感圧素子を設け、すべり量検出手段として、光源と、画像情報を取り込むイメージセンサと、イメージセンサの画像情報の差分に基づいて多指ハンドに対する物体の相対的な移動量を演算する演算手段とを具備する。
(もっと読む)
ロボットハンドの位置補正方法、ロボットハンド、ロボット
【課題】良好にティーチングを実施することが可能なロボットハンドの位置補正方法、ロボットハンド、ロボットを提供する。
【解決手段】複数の関節とCCDカメラ313を有するロボットハンド300とを備えるロボットに対してワーク200に設定された目標位置を教示する際にロボットハンド300の位置を補正する方法であって、目標位置に挿入したブッシュ210に設けられた目標マークをCCDカメラ313により撮像して、当該撮像した目標マークとCCDカメラ313の撮像範囲の基準位置とから、ロボットハンド300と目標位置との相対的な位置ズレを認識する認識ステップと、認識した位置ズレが小さくなるようにロボットの関節の駆動を制御してロボットハンド300の位置を補正する第1の位置補正ステップと、を備える。
(もっと読む)
1 - 20 / 68
[ Back to top ]