
Fターム[3C007LS05]の内容
マニピュレータ、ロボット (46,145) | 教示(プログラム作成) (978) | 直接教示(オンライン・ティーチング) (244) | 撮像装置を用いた教示 (65)
Fターム[3C007LS05]に分類される特許
1 - 20 / 65
動作プログラムの自動生成プログラムおよび装置
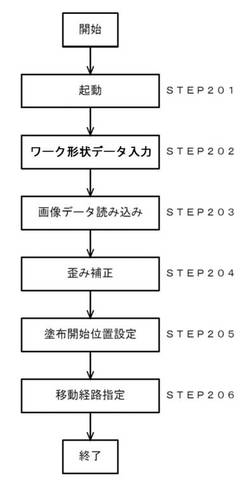
【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
レーザ加工ロボットの教示方法及び教示装置

【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
操作環境モデル構築システム、および操作環境モデル構築方法
【課題】作業ロボットの導入環境のモデル化負担を低減すること。
【解決手段】操作環境モデル構築システム100は、被操作体の計測により得られる立体像に対して幾何プリミティブを適応させて被操作体の幾何的特性を示す幾何情報を生成し、幾何情報の生成対象である被操作体の空間位置を示す位置情報を取得し、被操作体に対して作業ロボットにより行われるべき操作内容を示す操作情報を、生成された幾何情報及び取得された位置情報に対して関連付けて記憶する。被操作体に対して操作タグを仮想的に設定することができ、作業ロボットの導入環境のモデル化負担の低減を図ることができる。
(もっと読む)
ロボット制御設定支援装置
【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
ロボットのティーチングシステム
【課題】所定図形を撮像して取得される画像に基づいてロボットを制御するティーチングシステムにおいて、ロボット周囲の設備から制約を受ける場合であっても、ティーチング棒により適切にロボットを誘導できるようにする。
【解決手段】ロボットのティーチングシステムは、複数の関節を有するアーム12を動作させる多関節型ロボット10と、ロボット10の誘導に用いられるティーチング棒60と、ティーチング棒60に設けられキャリブレーションボードCの映像を表示する表示器と、アーム12に設けられ対象を撮像して画像を取得するカメラ14と、を備える。ティーチングシステムは、ボードCの映像がカメラ14により所定の目標画像として取得されるようにアーム12の動作を追従制御するロボットコントローラ20と、ボードCの映像の大きさ及び向きの少なくとも一方を、表示器から離れた位置で変更可能とするティーチングペンダント30と、を備える。
(もっと読む)
溶接マニピュレータ教示装置
【課題】レーザ光が照射された溶接ワークの撮像画像に基づく仮想ワイヤ距離Lを表示することで、溶接ワイヤの曲げ修正の手間をなくし、教示作業の精度向上、容易化を図る。
【解決手段】本発明に係る溶接マニピュレータ教示装置1は、溶接マニピュレータ2の溶接ノズル3に備えられる溶接ワイヤ4を溶接ワークWの溶接線Sに沿わす溶接動作を、溶接マニピュレータ2に教示する。溶接マニピュレータ2に、溶接ワイヤ4のワイヤ軸WJ方向又はこのワイヤ軸WJを横切る方向に沿ってレーザ光Kを溶接ワークWへ照射する投光器5と、投光器5のレーザ光軸LJを横切る方向からレーザ光Kが照射された溶接ワークWを撮像するカメラ6とを配備した光学機構7が設けられ、カメラ6の撮像画像Gと、撮像画像Gに基づいて計算された溶接ノズル3から溶接ワークWまでの仮想ワイヤ距離Lとを表示する表示手段8を有する構成となっている。
(もっと読む)
ロボット教示システム
【課題】作業効率の向上化が図れ、なお且つ、危険も伴わないロボット教示システムを提供することを目的としている。
【解決手段】ワークWに対して溶接等の作業を行うロボット1と、前記ロボット1の作業現場を撮影可能な複数の多視点画像撮影カメラ2と、前記各多視点画像撮影カメラ2によって撮影された画像を取得し、且つ、その取得した画像から前記ロボット1の作業現場の任意視点画像を生成する画像生成手段と、前記生成された任意視点画像を表示する表示手段と、前記表示された画像を用いて前記ロボット1の作動を指示可能な指示手段と、前記指示手段によって指示された作動に応じて前記ロボット1を制御するロボット制御手段とを有してなる。
(もっと読む)
相関分析システム
【課題】複数の時系列データ間の相関関係の推定精度の向上を図ることができるシステムを提供する。
【解決手段】本発明の相関分析システム100によれば、一の対象から取得された複数の状態軌道の状態空間における分布態様に応じて、当該複数の状態軌道が分類される。状態軌道において特異な形状特性を示す特異点のうち、状態空間における位置および形状因子が近似する特異点群がクラスタリングされることによりクラスタが生成される。
(もっと読む)
ロボットの駆動システム、及び、ロボットの駆動プログラム
【課題】 形状が複雑で自己遮蔽の多い動作物の動作にもとづき、見まね(非接触的方法)によりロボットを駆動するシステムを提供することにある。
【解決手段】 ロボットの複数の画像データと事前収集動作指令とを対応付けて画像対応動作指令記憶手段11に記憶する。ロボットを動作させるために、動作物に所望の動作を行わせ、その際に動作物の画像データを時系列でロボット動作用画像データとして取得する。画像データ特定及び動作指令発生装置14は、ロボット動作用画像データに含まれる画像データに対応する画像データを画像対応動作指令記憶手段11に記憶している複数の画像データから時系列で特定し、特定した画像データに対応する事前収集動作指令を動作指令としてロボットに与えてロボットを駆動する。これによりロボットは、動作物の形状の複雑さや自己遮蔽を解消して見まねにより動作する。
(もっと読む)
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
(もっと読む)
ロボットの動作を制御する方法およびロボットシステム
【課題】ロボットの動作を制御する方法およびロボットシステムにおいて、人間の手とは異なる構造を有するロボットに対し、人間の手のようなリアルタイムの動作の制御を行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示情報取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手指の関節および指先の位置を表す手指座標を決定し(手指座標決定ステップ、ステップS3)、この手指座標に基づいて、ロボットハンドの各関節の角度を算出する(ロボットハンド関節角度算出ステップ、ステップS4)。
(もっと読む)
ロボットの教示データを作成する方法およびロボット教示システム
【課題】ロボットの教示データを作成する方法およびロボット教示システムにおいて、ロボットアームを含むロボットの教示を簡単に行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示画像取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手首22の位置および向きを表す手首座標を決定し(手首座標決定ステップ、ステップS2)、手首座標に基づいて、ロボットアーム110の動作を教示するロボットアーム教示データを作成する(ロボットアーム教示データ作成ステップ、ステップS11)。
(もっと読む)
ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム
【課題】ティーチング作業をより簡略するとともにティーチング時間のさらなる短縮を可能とするためのロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】撮像装置を用いて教示を行うことが可能なロボット制御システムの教示用補助具の一実施形態であるティーチングツール50は、角錐面52a、52b、52cの色が互いに異なる三角錐部52を有するツール本体51と、このツール本体51に連結されたハンドル54とを備える。
(もっと読む)
ロボットティーチング装置
【課題】カメラを接続して映像を取り込んで行うティーチングはもちろん、カメラを使用しないオフライン作業においても、簡単にロボットのティーチングと同時にプログラミングができるロボットティーチング装置を提供する。
【解決手段】ロボットティーチング装置は、画像データ入力機能、ロボット動作プログラム作成機能及びロボット位置座標データ作成機能を有するコンピュータ、入力される画像データを表示するディスプレイ、及び上記ディスプレイに表示された画像の位置を指定するポインティングデバイスを備えたロボットティーチング装置において、上記コンピュータは、上記ポインティングデバイスにより指定された上記ディスプレイに表示された画像の位置情報に基づいて、ロボット位置座標データを作成する。
(もっと読む)
ロボットの制御装置及びロボットのティーチング方法
【課題】ロボットをティーチングする際に並行して撮像対象物までの距離計測を行うロボットの制御装置を提供する。
【解決手段】初期位置で撮像される画像フレームの中心周りで注視領域を設定し、初期位置の座標を移動元座標とする。入力された移動方向に対し、注視領域が撮像フレームに収まるようカメラを上記移動方向にTB(ベクトル)だけ微小移動させ、移動元座標,移動先座標(移動後の座標)からカメラの移動距離TC(ベクトル)を計算し、移動先座標,移動元座標で夫々捉えた画像から注視領域の移動距離を求めてカメラ間視差とし、カメラの焦点距離,移動距離,視差から三角測量法で移動元座標から注視点Pcまでの撮像距離を求め、入力された移動方向と撮像距離とから移動先座標を始点,撮像距離を半径としてカメラが注視点方向を常に向いた状態での目標円弧軌道を計算し、カメラを前記軌道に沿って移動させるようロボットに指令を出力する。
(もっと読む)
ロボット制御システム及びロボット制御プログラム
【課題】物体の搬送作業を行えるロボットを好適に制御できるロボット制御システムを、提供する。
【解決手段】カメラ画像が表示されているタッチスクリーン上の或る範囲を指定する操作が行われた場合、カメラ画像に対する画像セグメンテーション処理結果を利用して、カメラ画像中の、ユーザが指定した範囲内に所定割合以上の部分が含まれているセグメント群からなる画像を探索し、探索した画像を、搬送対象物の画像として特定(S102)し、特定した画像に基づき搬送対象物をロボットに搬送させる制御処理(S110)を行う。
(もっと読む)
移動体及び移動体の教示方法
【課題】教示作業を効率化するとともに、移動体の走行位置精度を向上することができるようにした、移動体及び移動体の教示方法を提供する。
【解決手段】車体1を走行させる走行装置4と、走行装置4を制御する制御装置3と、車体1の前方向を撮像する第1カメラ6と、車体1の後方向を撮像する第2カメラ7と、を有して構成し、制御装置3は、予め設定された車体の走行経路上の複数の教示地点のそれぞれにおいて、第1カメラ6及び第2カメラ7によって画像を取得し、それぞれ取得した画像を教示画像として記憶する教示画像取得部21と、第1カメラ6によりリアルタイムに撮像された撮像画像と、教示画像取得部21により予め取得された教示画像との比較結果に基づいて走行装置3を制御する走行制御部22とを有する。
(もっと読む)
モーションキャプチャデータを模倣するロボットの追跡及びバランス維持システム及び方法
【課題】モーションキャプチャデータに基き、自然な動作(例えば人間のような動作)を実行するロボットを提供すること。
【解決手段】コントローラ100を、バランス制御信号を供給するように構成されたバランスコントローラ101と、前記バランス制御信号に従ってバランスを維持しながら入力基準動作を追跡するように設定された動作命令を生成するように構成されたトラッキングコントローラ102とを備え、ロボットの複数の関節の各々が前記動作命令を使用でき、前記基準動作の追跡及びバランスの維持をもたらす構成とした。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】ユーザが、室内の所望の場所のみの掃除を行わせる作業等(その内容を確定させるために場所の指定を必要とする作業)をロボットに容易に行わせることが可能な環境を実現できるロボット制御システムを提供する。
【解決手段】ロボット制御システムを、ディスプレイ21上に、管理対象エリアの状況/様子を示す画像を表示するシステムであって、ディスプレイ21に表示されている画像上にユーザによって描画された線分図形の形状及び位置から、ロボット25に行わせるべき作業の内容を把握し、把握した内容の作業を行うようにロボット25を制御するシステムとして構成しておく。
(もっと読む)
ロボットハンドの位置補正方法、ロボットハンド、ロボット
【課題】良好にティーチングを実施することが可能なロボットハンドの位置補正方法、ロボットハンド、ロボットを提供する。
【解決手段】複数の関節とCCDカメラ313を有するロボットハンド300とを備えるロボットに対してワーク200に設定された目標位置を教示する際にロボットハンド300の位置を補正する方法であって、目標位置に挿入したブッシュ210に設けられた目標マークをCCDカメラ313により撮像して、当該撮像した目標マークとCCDカメラ313の撮像範囲の基準位置とから、ロボットハンド300と目標位置との相対的な位置ズレを認識する認識ステップと、認識した位置ズレが小さくなるようにロボットの関節の駆動を制御してロボットハンド300の位置を補正する第1の位置補正ステップと、を備える。
(もっと読む)
1 - 20 / 65
[ Back to top ]