
Fターム[3C007LS19]の内容
マニピュレータ、ロボット (46,145) | 教示(プログラム作成) (978) | 確認運転 (26)
Fターム[3C007LS19]に分類される特許
1 - 20 / 26
オフラインティーチング方法
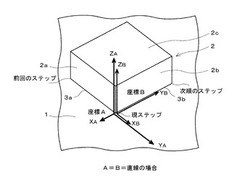
【課題】溶接システムにおけるオフラインティーチングを、操作の熟練を要することなく、高精度で、実施することができるオフラインティーチング方法を提供する。
【解決手段】
溶接線方向をY方向、被溶接材1の面に垂直の方向をZ方向、Y方向及びZ方向に垂直の方向をX方向とする3次元直交座標系を設定する。そして、前回のステップから現ステップを向く前段座標系として、XAYAZAの座標系Aを設定し、現ステップから次順のステップを向く後段座標系として、XBYBZBの座標系Bを設定する。よって、前回のステップから現ステップまでの溶接線セグメントはYA方向となり、現ステップから次順のステップまでの溶接線セグメントはYB方向となる。このワークを基準とする座標係で溶接線を規定し、オペレータがこのワーク座標上で、トーチ移動量を指定する。
(もっと読む)
ロボットの教示再生装置および教示再生方法

【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
ロボットの制御装置及びロボットの位置修正制御方法
【課題】ロボット本体の手先の教示点の修正が、アーム全体について意図しない動作を生じさせることを回避できるロボットの制御装置を提供する。
【解決手段】制御装置は、ティーチチェックモードの実行停止時点に実行中であった制御プログラム中の命令を判定し、当該命令が動作命令MOVEであれば当該動作命令を、動作命令MOVEでなければ直近に実行された動作命令MOVEを対象として、その時点の手先位置が動作命令MOVEの目標位置に一致しているか否かを判定する(S8,S9)。手先位置と目標位置とが一致していない場合は(S9:NO)、以降に行われるユーザの修正操作に応じた手先位置の修正制御を行い(S16)、手先位置と目標位置とが一致している場合は(S9:YES)、以降に行われる手先位置の修正制御に制限を付与する制限付き修正制御を行う(S10〜S12)。
(もっと読む)
作業マニピュレータのセンシング動作生成方法、センシング動作生成装置及びセンシング動作生成プログラム
【課題】実際の作業ワーク情報と教示データとの誤差が大きい場合でも、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する。作業マニピュレータ2の接触式センサ3が作業ワークWに接触するセンシング姿勢Sにおいて、接触式センサ3が接触する作業ワークWの接触面Tを抽出すると共に、この接触面Tを構成する一つのエッジEを選択し、選択された一つのエッジEの位置と、接触式センサ3の基端3b側に設定した設定位置6を接触面Tに射影した位置WPとが一致するように、作業マニピュレータ2のセンシング姿勢Sを再設定し、再設定されたセンシング姿勢Sを含むように作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
ロボット制御装置
【解決手段】 ロボット制御装置は、プログラムにより自動制御されるロボットハンド2の動きに対して動作確認を行うカメラ(撮像手段)7を備えており、このカメラから入力された画像に基づいて作動確認を行うことができるようになっている。上記ロボット制御装置は、上記カメラの撮像領域を変更する撮像領域変更手段8と、上記ロボットハンドの位置を検出する位置検出手段12とを備えており、位置検出手段が検出したロボットハンドの位置に応じて、上記撮像領域変更手段によりカメラの撮像領域を変更することができるようになっている。
【効果】 上記ロボットハンドの位置に追従してカメラの撮像領域を変更することができるので、1台のカメラであっても広い撮像領域を確保することができる。
(もっと読む)
溶接検査方法、溶接検査装置、溶接検査プログラム
【課題】CADシステムによらず溶接の適否を検査可能とすることを目的とする。
【解決手段】溶接の適否を検査する溶接検査装置であって、複数の基準溶接打点に関するデータを記憶した記憶部と、複数の実溶接打点に関するデータの入力を受け付ける入力部と、記憶部に記憶された基準溶接打点に関するデータ、及び前記入力部を通じて受け付けた実溶接打点に関するデータに基づいて、前記基準側と前記ロボット側の双方の図形パターンが、類似する図形パターンとなる溶接打点の組み合わせを決定する処理を行う組合決定手段と、前記類似する図形パターンを構成する組み合わせとして決定された基準側、ロボット側双方の溶接打点に基づいて、前記基準側の打点群に対して前記ロボット側の打点群を位置合わせする処理を行う位置合わせ手段と、前記位置合わせ後、前記基準溶接打点とそれに対応する実溶接打点とを比較することで溶接の適否を検査する検査手段と、からなることを特徴とする。
(もっと読む)
ロボット制御装置
【課題】ロボットに想定されている動作領域全体における各種動作、およびロボットの特定の領域における特定の動作について、両立して高い精度が確保されるロボット制御装置を提供する。
【解決手段】制御装置12は、ロボット11の動作を規定する実行プログラムに含まれるアプリケーションが特定領域における特定動作であるときに限り、専用パラメータ取得部36で取得した専用パラメータを適用してロボット11を制御する。一方、制御装置12は、特定領域外における特定動作でないとき、汎用パラメータ取得部35で取得した汎用パラメータを適用してロボット11を制御する。そのため、ロボット11の制御には、特定領域における特定動作であるとき専用パラメータが適用され、その他の領域および動作では汎用パラメータが適用される。
(もっと読む)
ロボットの教示装置
【課題】効率的に短時間で教示を行い、教示作業の負担を軽減することが可能となるロボットの教示装置を提供する。
【解決手段】ツール姿勢をツール姿勢入力手段1025で入力し、ジョグ移動させる際にロボット先端の位置または基本軸のみの軸操作で、姿勢を同時に変更させるツール姿勢自動変更手段1026を設け、冗長自由度がある場合は障害物位置入力手段1027から入力された位置情報を基に、ジョグ移動させる際にロボットが障害物に干渉しないように冗長自由度の姿勢をも変更させる冗長姿勢自動変更手段1028を設ける。
(もっと読む)
動作プログラム作成支援システム
【課題】 複数のロボットやそれに付随する装置が連携しつつ並行して動作するシステムにおける動作プログラムの動作所要時間を知ることにより、各指令のタイミング調整を容易にし、動作プログラムを効率よく作成することができる動作プログラム作成支援システムを提供する。
【解決手段】 動作プログラム作成支援装置1と、ロボットや装置の動作を制御するコントローラ2、3、4と、がネットワーク5で接続され、動作プログラム作成支援装置1に、動作プログラムの指令毎にコントローラに動作所要時間を問合わせる動作所要時間問合せ部13を備え、コントローラ2、3、4に、動作に要する動作所要時間を算出し動作所要時間問合せ部13に出力する所要時間算出部201、301、401を備える。
(もっと読む)
基板処理装置のための設置・搬送情報教示治具及び教示方法
【課題】より正確な、搬送位置ティーチングや基板搬送ロボット、及び処理室内の把持装置の水平確認、調整、及び基板搬送ロボット上に載置された基板が滑り出す基板搬送ロボットの動作加速度測定を、効率的に行うことができる設置・搬送情報教示治具及び教示方法を提供する。
【解決手段】処理対象の設置・搬送情報教示治具であって、加速度検出器と、該加速度検出器を支持する支持板と、該加速度検出器に加わる重力加速度又は動作加速度を電気信号に変換して通信する通信手段と、該通信手段から通信される電気信号を処理し、得られる該設置・搬送情報を表示、出力する制御手段とを含む設置・搬送情報教示治具及びそれを用いる設置・搬送情報教示方法である。
(もっと読む)
ロボット
【課題】本発明は、音声合成部と音声認識部の設定およびセリフとなる文字列を自動的に適切に調整し、ユーザの作業を簡易化することができるロボットを提供する。
【解決手段】出力音声を合成する音声合成部3と、入力音声の認識を行う音声認識部4と、前記音声合成部3および前記音声認識部4の設定を調整する調整部5とを備えたロボット1において、前記調整部5は、前記出力音声を前記音声認識部4の入力音声とした認識結果を基に調整するものである。
(もっと読む)
負荷機械の制御装置とその衝突検出しきい値更新方法
【課題】予め設定した衝突検出しきい値を、工作機械や産業用ロボット等のの負荷機械の状態に応じて自動更新し、機械に作用する摩擦等に変化が生じる場合でも、衝突検出の感度を低下させることなく、衝突時の負荷を最小限に抑える信頼性の高い機械の制御装置提供する。
【解決手段】衝突検出しきい値の初期値を設定する初期値設定モードと、負荷機械の通常行なう動作パターンで動作させる通常動作モードとを有し、初期値設定モードにおいて、動作パターンをN分割して各動作区間の動作を開始させ、サーボ制御部12から現在の外乱推定最大値を保持する制御統括部11と、各動作区間における外乱推定値を推定してその最大値を現在の外乱推定最大値として制御統括部11に渡すサーボ制御部12とを備え、通常動作モードにおいて、制御統括部11が、外乱推定値と現在の衝突検出しきい値とに基づいて現在の衝突検出しきい値を自動的に更新する。
(もっと読む)
軌跡データ生成装置、軌跡データ生成方法及び軌跡データ生成プログラム
【課題】本発明は、音楽に合わせて動き対象を動かすための軌跡を得る。
【解決手段】本発明は、音楽ロボット装置11の楕円体状筐体20が動くときに再生する圧縮音楽データを設定し、ユーザによって描かれた楕円体状筐体20の動きの軌跡に対し、その設定した圧縮音楽データの再生時間情報を関連付けて軌跡データを生成することにより、楕円体状筐体20を動かすための所望の軌跡を示し、かつ圧縮音楽データの再生に同期して楕円体状筐体20を動かすための軌跡データを容易に生成でき、音楽に合わせて楕円体状筐体20を動かすための軌跡を容易に得ることができる。
(もっと読む)
作業ロボットのオフラインティーチング装置
【課題】 オフラインティーチングで、作業ロボットとワークおよび周辺装置の干渉チェックを行うに際して、干渉チェックの精度、信頼性を高く維持しつつも、干渉チェックの処理時間を減らす。また、作業ロボットの3次元モデルを画面上で実際の作業ロボットと同じ速度で再生動作させるに際して、画面更新間隔の時間内に干渉チェックを確実に終了させるようにして、コマ落ちすることなく画面上で作業ロボットを滑らかに再生動作させる。
【解決手段】 作業ロボット1の3次元モデル1M(ポリゴン90)とは別に干渉チェック用線分20が設定され、線分20と、ワーク10および周辺装置80の3次元モデル10M、80Mを構成するポリゴン91とが交差していることを判定することで、両者の干渉を判定する。また、干渉チェックサブルーチン処理に使用する干渉チェック用線分20の本数Cを調整することで、干渉チェックサブルーチン処理に要する時間を調整して、画面更新間隔の時間tを標準更新時間tstd付近に調整する。
(もっと読む)
複数のロボット間のインターロック自動設定装置及び自動設定方法
【課題】複数のロボットを含むシステムにおいて、オフラインのシミュレーションを行うことによって適切な干渉領域を求め、それに基づいてインターロックを自動的に設定することができるインターロック自動設定装置及び自動設定方法を提供する。
【解決手段】インターロック自動設定装置は、動作プログラムに基づいてオフラインのプログラミングシステム上でシミュレーションを行い、各ロボットの動作経路を取得し、第1の2次元干渉領域を求める。次に、第1の2次元干渉領域を鉛直方向に延長して形成された第1の3次元干渉領域内において、各ロボットの3次元モデルを用いて厳密な第2の3次元干渉領域を求める。
(もっと読む)
プログラミングペンダント
【課題】オフライン上で生成されたコマンド列において、実ラインにてそのコマンドに付随する物理的な接触力等の制御パラメータを容易に教示することが可能なプログラミングペンダントを提供する
【解決手段】ハンドに力センサ2を備え、部品同士4、5を接触遷移させて組立作業を行うロボット1と、力センサ2の出力がフィードバックされるインピーダンス制御部13を備えてロボット1を制御する制御装置11とに対して教示を行うプログラミングペンダント7に、部品同士の接触反力を教示作業者に触覚として伝える反力提示手段10と、反力提示手段10に力センサ2の出力に基づいた動作指令を与える反力制御手段16と、インピーダンス制御部13の制御パラメータを調整する調整手段9とを設けた。
(もっと読む)
ロボット動作編集システム
【課題】ロボット動作編集システムにおいて、ロボット実機による検証を省略して効率向上を図ること。
【解決手段】ロボット動作編集システムは、モーション入力部、データ形式変換部、モーション編集部、ロボット用データ生成部を備える。ロボット用データ生成部は、モーション編集部で制作された動作データに対する関節構造変換処理部と、関節構造変換処理部から出力されるデータを平滑化処理する平滑化処理部と、平滑化処理部から出力されるデータを用いてロボットの駆動回路の挙動を検証する駆動回路検証部とを備え、ロボットを動作させるための動作データの連続性を保つように処理する機能と、ロボットの駆動回路における駆動電流が許容範囲内に収まるようにデータを変換する機能とを有する。
(もっと読む)
自動組立システムにおける組立機構の動作教示方法
【課題】より効率的かつ柔軟にロボットアーム等の組立機構の動作を教示する。
【解決手段】部品把持手段22を備える組立機構20を用いて複数の部品10を順次組みつけて所定の組立対象物を構成する自動組立システムにおいて、前記組立機構の動作を教示する方法であって、各部品10の組み付け時の動きを定義するステップと、定義した各部品10の動きが実現されるように、組立機構20の動作を決定するステップとを含む。
(もっと読む)
レーザ溶接教示装置及び方法
【課題】 スキャナ動作の教示を簡単にし、ロボットの溶接作業時間の短縮を可能にするレーザ溶接教示装置及び方法を提供する。
【解決手段】 レーザ溶接教示装置10は、ワークWに対し溶接作業を行う溶接ロボット12を制御するロボット制御装置14に接続されて、ロボット制御装置14に対し種々の指示を送る。溶接ロボット12の作業ツール16には、レーザ発振器18が接続されるとともにレーザスキャナ20が設けられる。高速移動可能なレーザスキャナ20を用いることにより、エアカット動作時のロボット12の動作が大幅に削減され、システム全体としてのサイクルタイムも大幅に短縮される。
(もっと読む)
溶接ロボットのティーチング方法
【課題】 溶接打点位置の補正を容易に行うことができるとともにティーチングデータの精度の低下を防ぐことができる溶接ロボットのティーチング方法を提供する。
【解決手段】 CAD端末上に構築されたシミュレーションモデルによりオフラインティーチングを行って得られた各溶接打点位置と、オフラインティーチングデータに基づいて動作させた溶接現場の実溶接ロボットにおいてレーザー式三次元測定機により実治具の座標系を基準にして測定された前記各溶接打点位置に対応する固定側ガン先端位置との誤差値を算出し、前記各溶接打点位置に前記誤差値の分、前記誤差値と逆方向にそれぞれ加算してオフラインティーチングデータを補正し、補正されたオフラインティーチングデータに基づいて溶接現場の実溶接ロボットを動作させて実ワークを溶接する。
(もっと読む)
1 - 20 / 26
[ Back to top ]