
Fターム[3C269QC09]の内容
Fターム[3C269QC09]に分類される特許
1 - 17 / 17
画像処理装置及びプログラム
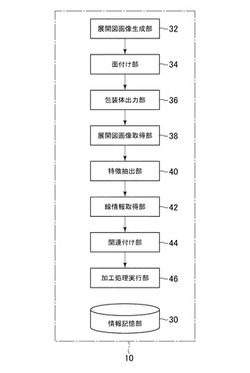
【課題】展開図を表す展開図画像に、その展開図の特徴に応じた線を関連付けることができる画像処理装置及びプログラムを提供する。
【解決手段】展開図画像取得部38は、展開図を表す展開図画像を取得する。線情報取得部42は、展開図に付される線を表す線情報を、展開図の特徴を表す特徴情報に関連付けて記憶する情報記憶部30から、展開図画像取得部38が取得した展開図画像の特徴を表す特徴情報に関連付けて記憶されている線情報を取得する。関連付け部44は、展開図画像取得部38が取得した展開図画像と、線情報取得部42が取得した線情報が表す線と、を関連付ける。
(もっと読む)
製造システム、製造方法、およびプログラム

【課題】簡単に、付加物が付加された対象物の形状を成形でき、特に、対象物を計測してから、より迅速に成形する。
【解決手段】スキャナ11は、人の顔16の表面の各点の3次元空間上の位置を測定し、ポリゴンデータを出力する。コンピュータ14は、ポリゴンデータを、顔16の形状を示すサーフェースデータに変換し、兜の形状を示すサーフェースデータと、顔16の形状を示すサーフェースデータとを合成する。マシニングセンタ15は、兜の形状が予め成形されているブランクに、合成されたデータで示される形状によって人の顔16の形状を成形する。本発明は、製造システムに適用できる。
(もっと読む)
データ処理装置及び制御方法及びプログラム
【課題】周期時間内にデータ処理を確実に完了させることとデータ処理結果の精度の向上を図ることを同時に達成する。
【解決手段】メインCPU200に、確実に周期時間内にデータ処理が完了するが、データ処理の精度は制御アルゴリズムBよりも劣る制御アルゴリズムAを割り当て、サブCPU300に、周期時間内にデータ処理が完了する保証はないが、データ処理の精度は制御アルゴリズムAよりも高い制御アルゴリズムBを割り当て、メインCPU200とサブCPU300が同時に制御アルゴリズムAと制御アルゴリズムBによりデータ処理を行い、周期時間内に完了したデータ処理結果のうち、精度が高いデータ処理結果を採用する。
(もっと読む)
金型補修方法
【課題】金型の補修の作業効率を向上させ、金型の補修にかかる時間を短縮することができる金型補修方法の提供。
【解決手段】金型補修方法のクラック切除工程では、刃物17を用いてクラック21aが生じているキャビティ画成部21Aの部分と共にクラック21aを切除して切除部分21bを形成する。次に、CTスキャン16により切除部分21bの形状を非接触でスキャンし、その結果をCTスキャン16において3次元化したデータとし、CADCAMシステム14へ出力する。次に、CTスキャン16からの3次元化したデータとCADデータとから、レーザー溶接装置10を自動制御するためのレーザー溶接CAMデータを作成するレーザー溶接CAMデータ作成工程を行う。次に、レーザー溶接装置10により切除部分21bに対してレーザー溶接による肉盛り溶接を施す。
(もっと読む)
工作機械のワーク形状測定装置
【課題】高精度センサのみを用いた場合と比較して短時間で測定することができると共に、所定の箇所に対して高精度に測定することができる工作機械のワーク形状測定装置を提供することにある。
【解決手段】広範囲に亘って測定可能な広範囲センサ11と、このセンサ11により測定されたデータに基づき、ワーク1の概略3次元形状を作成する第一のワークモデル作成器13と、高精度に測定可能な高精度センサ12と、このセンサ12により測定されたデータに基づき、ワーク1の高精度3次元形状を作成する第二のワークモデル作成器14と、ワーク1の概略3次元形状とワーク1の高精度3次元形状に基づき、当該ワーク1の概略3次元形状にてワーク1の高精度3次元形状と一致する箇所を当該ワーク1の高精度3次元形状に置き換えてワーク1の全体3次元形状を作成するワークモデル結合器15とを備えた。
(もっと読む)
工具衝突防止システム及び工具衝突防止方法
【課題】いかなるタイプの加工装置にも適用可能な工具衝突防止システム等を提供する。
【解決手段】
加工装置2においてユーザによる所定の判定開始操作があると、加工装置2は、予め用意された判定開始用プログラムP1に従って動作することにより、加工部21の状態情報及び加工プログラム情報と共に、衝突判定の開始指示としての開始トリガ情報を中継装置4へ出力する。中継装置4は開始トリガ情報を取得すると、取得した状態情報及び加工プログラム情報と共にシミュレータ3が認識可能な判定開始情報をシミュレータ3に出力する。判定開始情報を取得したシミュレータ3は、取得した状態情報に基づいて、取得した加工プログラム情報に対応する加工プログラムに従ってワークが加工される過程をシミュレーションし、加工処理中にワーク部と工具とが衝突するか否かを判定する。
(もっと読む)
工具経路算出装置、工具経路算出プログラムおよび工具経路算出方法
【課題】4軸制御において深い縦壁部分を含んだ加工面であっても、高速かつ高精度な切削を実現するための工具経路を算出する。
【解決手段】工具経路算出装置130は、設計データ120から3軸等高線経路を取得する(ステップS131)。そして、旋回2軸のうち、変動軸の初期旋回角度変化率を決定し(ステップS132)、変動軸の旋回角中心を算出する(ステップS133)。この算出結果から、さらに工具ベクトルを算出し(ステップS134)、経路軸コードを算出して(ステップS135)、NCデータ140を出力する。
(もっと読む)
加工シミュレーション方法及び加工シミュレーション装置
【課題】現実的で正確な加工シミュレーションを実行可能な加工シミュレーション装置などを提供する。
【解決手段】加工シミュレーション装置1は、工具保持機構,ワーク保持機構,駆動機構及び数値制御装置61を備えた工作機械に設けられており、工具保持機構に保持された工具及びワークを保持していない状態のワーク保持機構を撮像して実画像データを生成する実CCDカメラ11と、数値制御装置61から受信した動作指令と、各保持機構,工具及びワークのモデルデータを基に、各保持機構を動作させたときのモデルデータを生成するモデルデータ更新処理部14と、生成されたモデルデータを基に工具及びワークの仮想画像データを生成する仮想画像生成処理部15と、生成された実画像データ及び仮想画像データを基に、実画像上に仮想画像を重ね合わせた合成画像データを生成して画面表示装置18に表示させるレンダリング処理部17とを備える。
(もっと読む)
金型加工データ変更方法
【課題】元の加工データを有効に利用して短時間に二番型用の加工データを得る。
【解決手段】成形品モデルに基づき、NC加工データを作製する。NC工作機械により、NC加工データに基づいて金型を作製する。金型の修正をして一番型を得る。計測器により、一番型を3次元的に計測して、メッシュデータ34を得る。NC加工データにおける加工工具16の移動経路20を示す複数箇所のデータから選択された箇所36で、加工端面16aがメッシュデータ34に対して点接触する位置まで加工工具16をZ方向に移動させる。元のNC加工データを、移動後の加工工具16の位置に基づいて変更する。
(もっと読む)
CADシステム及びCAM加工情報の生成方法
【課題】 CAM加工情報を生成する三次元CADシステム及び三次元CADを利用したCAM加工情報の生成方法において、二次元CADを合理的に利用する手法を提供すること。
【解決手段】処理装置は三次元CAD画像を生成しモニタに表示可能であり、この三次元CAD画像からCAMによる加工情報を生成する。処理装置は、二次元輪郭抽出部、区画分割部、最高点抽出部及び二次元加工範囲抽出部を備え、二次元輪郭抽出部は製品における加工対象部側視で加工対象部の二次元輪郭を投影させて抽出する。二次元加工範囲抽出部は、各区画A〜Nと区画高さZ0〜Z4により定まる二次元加工範囲を抽出し、CAMによる加工情報を生成する。
(もっと読む)
CADシステム並びにこれを実行するためのコンピュータプログラム及びこのコンピュータプログラムを記録した記録媒体
【課題】 設計者が設計段階において容易に且つ迅速に設計変更を行うことができるCADシステム並びにこれを実行するためのコンピュータプログラム及びこのコンピュータプログラムを記録した記録媒体を提供すること。
【解決手段】親部品生成部は親部品属性データベースから入力装置を介して選択された属性の親部品51〜54を作成する。部品ユニットデータベース14から入力装置を介して子部品を選択すると共に親部品にその子部品の配置位置を指示することで、シェルユニット生成部が部品シェル基礎データ400及び未加工シェル基礎データ300に基づいて対応する属性の親部品51〜54に部品シェル及び/又は未加工シェルを生成すると共に部品シェル及び未加工シェルを関連づけてシェルユニット20を生成する。シェルユニット20は親部品51〜54に重ねられてモニタに表示される。
(もっと読む)
ワーク加工方法及び加工プログラム
【課題】 湾曲面上にエッジ線を有するワークを効率よく短時間で加工することを可能にするワーク加工方法、及びそれをコンピュータで実行するためのプログラムを提供する。
【解決手段】 内方に湾曲する円弧形状の切刃を有する円柱状の回転工具により、ワークの外方に湾曲したエッジ線を有する外方湾曲部を切削加工する方法であって、前記工具を前記ワークの外方湾曲部の目標製品形状の中心線(CL)に沿って移動させてワークを加工するとき、目標製品形状をその中心線(CL)上で所定のピッチをとって切る面と前記目標製品形状の湾曲面部との交線に、工具の中心線(4c)を通る面で工具の先端部を切ってできる形状線を重ね合わせながら、前記工具の中心線上の先端点(4b)を算出し、該先端点の位置を工具座標位置を示すNCデータとして工具による加工を行う。
(もっと読む)
食品装飾加工システム
【課題】食品の外観を完全に自動的に装飾ができる食品添え食加工システムを提供する。
【解決手段】外部情報2を受け取ってその外部情報2をデジタルファイルに変換する入力装置10と、この入力装置10と接続され、デジタルファイルを処理して移動経路情報にする情報処理装置11と、食材を収納するための貯蔵部120とこの貯蔵部120に連通され食材を送出する加工部121を有する加工装置12と、前記情報処理装置11からの移動経路情報を受け取って前記加工装置12を駆動する駆動装置13とを具備し、前記駆動装置13が貯蔵部120から加工部12に食材を輸送し、加工部12を移動させると同時に食材を送出し、前記食品に絵を描いたり、トリムや装飾を行うようにすることを特徴とする。
(もっと読む)
製造システムおよび製造物
【課題】対象物に印加されるフィールド[f] に応じて生成されるポテンシャル[x] を有する対象物の製造システムを提供する。
【解決手段】演算処理可能な対象物の数学モデル(801)は対象物外形状より分割した複数の有限要素(802)に関連するフィールド[f] 及びポテンシャル[x] の各数値を特定して生成する。各有限要素(802)の素材の各物性値(804)の対称性が特定され、関係式[f]=[k][x]及び対称性に基づいて素材の物性マトリックス[k] を算出する。素材の物性値(804)の係数を、素材の物性マトリックス[k] から有限要素毎に抽出し、抽出された素材物性値(804)の係数と既知の素材物性値の係数とを一致するように比較する。製造設備を制御するための各製造パラメータ(805)を一致した素材物性値(804)の各係数に基づいて決定し、上記決定された各製造パラメータ(805)に応じて製造設備を制御して上記対象物を製造する。
(もっと読む)
作業用ロボットの教示データ作成装置
【課題】ロボットに搭載した三次元スキャナのデータに基づいて教示データを短時間かつ高精度に自動的に作成し得る作業用ロボットの教示データ作成装置を提供する。
【解決手段】作業用ロボットに付帯して設置された三次元スキャナと、該三次元スキャナで読み取ったデータを処理する演算装置を備え、演算装置は、三次元スキャナのスキャンにより得られるワーク平面の点群データと、該スキャン時の作業用ロボットのアームの位置情報とを取得し、これら両情報を演算処理して教示データを作成することを特徴とする。前記制御装置は、ワークが所定の大きさの場合にワーク平面の点群データを複数回取得しこれら複数の点群データを合成処理して1つの点群データとしたり、前記点群データに重複部分がある場合に予め設定した条件により間引き合成処理する。
(もっと読む)
マルチヘッド複合材料使用機械を動かすプログラムを作成する方法、マルチヘッド複合材料使用機械をプログラムするためのコンピュータプログラムプロダクト、およびマルチヘッド複合材料使用機械を動かすプログラムを作成するための複合部品プログラムポストプロセッサ
【課題】複合部品プログラムを効率的に作成できる方法および装置を提供する。
【解決手段】コンピュータ数値制御(CNC)マルチヘッド複合材料使用機械とともに使用するための複合部品プログラムを作成する複合部品プログラムポストプロセッサ。ポストプロセッサは定義受信器、ルートデリニエータ、接近および離脱プロファイラ、機械軸解コンピュータおよび出力ファイルコンポーザを含む。定義受信器はたとえば複合部品プログラム生成器から材料使用経路定義を受取る。ルートデリニエータはツールキャリッジおよび製造ツールのルートを描く。さらに、接近および離脱プロファイラは接近および離脱のプロファイルを経路に追加し、機械軸位置コンピュータは機械軸位置を計算して複合材料使用機械を制御しかつ複合材料使用ヘッドを経路に沿って案内する。出力ファイルコンポーザはCNC複合部品プログラムを組合せる。
(もっと読む)
三次元の物体の外面を、バーチャルに、もしくはプラスチック、合成物または薄い材料に、調査、デジタル化、再生する、電子写真光学系
任意の種類の物体の外形を調査し、再度生成し、それをCAD 3Dシステム内に、バーチャルに、またはプラスチック、合成物または薄い材料に物質的に再生するべく、システム(1、2)の取得および再生ユニットはネットワーク(3、4、6)を用いて相互に接続される。  (もっと読む)
(もっと読む)
1 - 17 / 17
[ Back to top ]