
Fターム[3D232CC37]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661) | 故障対策(フェイルセイフ) (1,724) | バックアップ (148)
Fターム[3D232CC37]に分類される特許
1 - 20 / 148
電動パワーステアリング装置
【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置

【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
冗長機能付きステアバイワイヤ式操舵装置の制御装置
【課題】 転舵用のメインモータの失陥および制御装置の故障に対する冗長性確保のための多重化と、平常時は多重化部分を利用した高機能化を両立したステアバイワイヤ式操舵装置の制御装置を提供する。
【解決手段】 メインモータを切り離しサブモータの回転を伝えて転舵可能なフェールセーフモードとする切替機構17を有する。第1の制御装置101は、反力アクチュエータ4とサブモータ7を制御する。第2の制御装置201は、メインモータ6を駆動する。第1の制御装置101は、異常時切替指令部106を有し、メインモータ6が失陥であるとの診断結果を受けたとき、および相互故障診断部103で第2の制御装置201が故障であると診断したときに、切替機構17をフェールセーフモードとする。
(もっと読む)
電動パワーステアリング装置
【課題】モータ回転角センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】モータ回転角センサ(24)の異常が検出された場合には、モータ回転角にかえて、ステアリングシャフト(3)の回転角で、モータ(12)を駆動制御する。更に、前記ステアリングシャフト(3)の回転角は、モータ(12)の回転角に対して、トーションバー(17)の捻れ分だけ位相が進んでいるので、トーションバー(17)の捻れ分だけステアリングシャフト(3)の回転角の位相を遅らせる補正を行なう。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横Gに基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横Gに基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】トー角調整時に転舵軸の非回転分割軸と回転分割軸とが互いに抜けることが防げ、トー角調整用モータの消費電力量を抑えることができるステアバイワイヤ式操舵装置を提供する。
【解決手段】非回転分割軸10Aと回転分割軸10Bとがねじ結合部で互いに結合された転舵軸10を備える。両分割軸10A,10Bを一体に軸方向移動させることにより、転舵輪を転舵させる。非回転分割軸10Aに対して回転分割軸10Bを回転させて、ねじ結合部の螺合長さを調整することにより、転舵輪のトー角を変える。一方の分割軸10Aに、径方向に広がるつば部90b,90cを有する被係合部材90を設ける。他方の分割軸10Bに、ねじ結合部の螺合長さが一定長さ以下になった場合に、つば部90cに係合して螺合長さが短くなる側への両分割軸10A,10Bの相対軸方向移動を規制する係合部材91を設ける。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
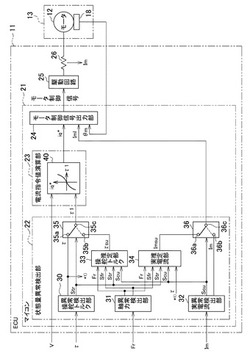
電動パワーステアリング装置
【課題】マイクロコンピュータが故障した場合においても、操舵トルクに応じた補助操舵力を、簡易・小型かつ信頼性の高い構成で、ステアリング系に付与することを可能とする電動パワーステアリング装置を提供する。
【解決手段】第1電動機駆動信号(PWM信号MCU)を発生するフィードバック制御の第1電動機駆動信号発生手段(例えばマイクロコンピュータ102)に故障が生じた場合には、第2電動機駆動信号発生手段(例えば、ディスクリート部品によって構成されるPWM信号発生部66)による操舵トルク信号VT3の直接変換によって発生した第2電動機駆動信号(PWM信号TS)に基づいて電動機36を駆動する。
(もっと読む)
電動パワーステアリング装置
【課題】電流センサが故障した場合でも、アシスト制御中にモータの断線や短絡といった異常を検出できるようにする。
【解決手段】電流センサ異常検出部91により電流センサ31の異常が検出された場合、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算し、電圧値重畳部83が、基本電圧V0に、交流電圧信号生成部82から出力された交流電圧信号である重畳信号V1を加算して電圧指令値V*を求める。モータ異常検出部92は、操舵トルクtrの振動の大きさを計算し、振動の大きさが基準値未満となる場合には、モータ20の通電路に異常が生じていると判定する。
(もっと読む)
電動パワーステアリング装置
【課題】第1電流センサのバックアップ用として設けた低分解能の第2電流センサを使っている場合でも、良好な操舵アシストを行う。
【解決手段】第1電流センサ31の異常が検出されている場合には、異常時モータ制御量演算部80が電圧指令値V*を演算する。異常時モータ制御量演算部80は、操舵トルクtrに比例した基本電圧V0に、逆起電圧の推定値に相当する補正電圧V1と、逆起電圧を推定するための交流電圧V2とを加算した値(V0+V1+V2)を電圧指令値V*として設定する。
(もっと読む)
車両用操舵装置およびその制御方法
【課題】ステアバイワイヤシステムを有する車両用操舵装置において、旋回制動時等の走行安定性を向上させること。
【解決手段】ステアバイワイヤシステムと、ステアリングラック部材14と車輪とを連結する転舵用リンク部材と、転舵用リンク部材と並行して設置し、車体と車輪とを車両上下方向に揺動可能に連結する懸架用リンク部材と、ステアリングラック部材14を車両前後方向に移動させるラック移動手段27a、27b、27cと、ラック移動手段27a、27b、27cによるステアリングラックの移動に応じて、入力側ステアリング軸と出力側ステアリング軸との連結状態を切り替えるクラッチ27dと、を有し、ラック移動手段27a、27b、27cが、ステアリングラック部材14を、転舵用リンク部材との連結点が懸架用リンク部材に近づく方向に移動させる車両用操舵装置とした。
(もっと読む)
ヨーレート推定装置及びそれを用いた車両姿勢制御装置
【課題】ヨーレートセンサに頼らずにヨーレートを推定し、ヨーレートセンサが故障したときでも、車両姿勢制御を継続可能にする。
【解決手段】電動モータ20に流れる電流を検出し、検出された値に基づき、軸力Fを推定する。予め設定され記憶された軸力及び横加速度の関係に、前記推定された軸力を適用して、横加速度Gを推定し、このに推定された横加速度Gを用いて、車両のヨーレートを推定する。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合の電気角の推定精度を向上させる。
【解決手段】電気角推定部110は、操舵トルクTrによりモータの第1推定回転方向d1を推定する第1回転方向推定部111と、誘起電圧ベクトルの移動方向からモータの第2推定回転方向d2を推定する第2回転方向推定部114と、第1推定回転方向d1と第2推定回転方向d2とを選択的に切り替える回転方向修正部115とを備える。回転方向修正部115は、第1推定回転方向d1と第2推定回転方向d2とが相違する場合、誘起電圧ベクトルの向く方向から決まる第2推定電気角と、モータ制御で使用している推定電気角θebとが一致したタイミングで、最終推定回転方向dxを第2推定回転方向d2に切り替える。
(もっと読む)
車両用操舵装置
【課題】操舵用の電動モータのフェール時にも、転舵輪の向きを容易に変位することのできる車両用操舵装置を提供する。
【解決手段】電動モータ21,22のロータ31,41によって駆動されるボールナット48と、転舵軸6に設けられボールナット48にねじ結合されたねじ軸47とを含むボールねじ機構23が設けられている。転舵軸6の回転は、第1規制機構60によって規制されている。ねじ部材58は、ブッシュ26から取り外すことが可能である。ねじ部材58は、ハウジング5の第2雌ねじ部63およびロータ31の第2挿通孔64を挿通することにより、ロータ31,41の回転を規制する。このとき、ブッシュ26を回転させることにより、転舵軸6は、ボールナット48に対して回転しながら、軸方向X1に変位し、転舵輪の向きが変わる。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】温度変化などによるドリフトの影響を完全に除去することができるトルクセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】回転軸に生じるトルクに応じて互いに逆方向にインピーダンスが変化する2対の検出コイル13a〜13dを軸方向に配列したトルク検出部10と、前記2対の検出コイルのうち軸方向の両端側の2つの検出コイル13a,13dとこれらに直列に接続した抵抗体とで構成される第1のブリッジ回路210Aと、前記2対の検出コイルのうち軸方向の中央側の2つの検出コイル13b,13cとこれらに直列に接続した抵抗体とで構成される第2のブリッジ回路210Bと、前記第1のブリッジ回路210A及び第2のブリッジ回路210Bに個別に交流信号を印加したときの差分信号に基づいて少なくとも2組の検出トルクを演算するトルク演算部21A,21Bとを備えている。
(もっと読む)
トルク検出装置および電動パワーステアリング装置
【課題】 レゾルバの検出コイルの一方が断線した場合でも、操舵トルクを検出できなくなる状況を低減する。
【解決手段】 第1レゾルバ110,第2レゾルバ120は、ハンドル中立状態におけるロータ部110r,120rとステータ部110s,120sとの相対位置関係が、sin相検出信号の振幅がゼロでcos相検出信号の振幅が最大となる位置を基準位置(θe=0°)として、その基準位置に対して電気角で45°+90°×K(Kは整数)だけずれるように、組み付け位相が設定されている。これにより、ハンドル中立状態においては、レゾルバの電気角が回転角不確定領域に入らなくなり、操舵トルクを検出できなくなる頻度が低下する。
(もっと読む)
1 - 20 / 148
[ Back to top ]