
Fターム[3D232DA47]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | エンジン状態 (193)
Fターム[3D232DA47]の下位に属するFターム
Fターム[3D232DA47]に分類される特許
1 - 20 / 52
操舵機構の制御装置
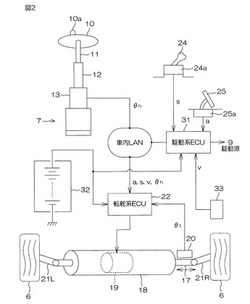
【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
電動パワーステアリング装置

【課題】通電不良相発生における、特に高速走行中でのトルクリップルの影響を抑制し、微妙なハンドル操舵を容易にすることのできる電動パワーステアリング装置を提供する。
【解決手段】CPU17は、モータ12の何れかの相に通電不良が発生した場合に該異常の発生を検出可能な異常判定部31を備え、該異常が検出された場合には、当該通電不良発生相以外の二相を通電相としてモータ制御信号の生成を実行する。そして、このとき、CPU17は、当該通電不良発生相に応じた所定の回転角を除いて、q軸電流指令値Iq*に対応したq軸電流値Iqが発生するようにd軸電流指令値Id*を演算する。そして、EPSECU11から、CAN通信20を通じてエンジンECU19に、車速制限要求信号Vrsを出力する。エンジンECU19は受取った車速制限要求信号Vrsが「1」の場合、エンジン回転数制御を行い、車速を所定車速V0以下にする。
(もっと読む)
車両の後輪操舵制御装置
【課題】指示トー角への実トー角の追従性を向上させる車両の後輪操舵制御装置を提供する。
【解決手段】車両の左右後輪の指示トー角を設定する指示トー角設定手段119と、車両の運動状態量を検出する状態量検出手段17と、を備え、指示トー角と検出された実トー角との偏差に基づき操作量を算出し、この操作量に基づいて車両の左右後輪に設けられたアクチュエータ11を作動させることによってトー角を変化させる後輪操舵制御装置である。本装置は、偏差を積分する積分手段124と、前記アクチュエータの制御特性に起因した前記指示トー角、前記実トー角、もしくは前記偏差の変動に応じて前記積分手段の偏差の積分量を減少させる指令を行うリセット指令手段120とを備える構成とする。
(もっと読む)
稼動体の異常検出方法及び異常検出システム
【課題】外部からの影響によって異常程度の進展や監視信号が変化する場合でも、異常程度の進展を的確に捉えることができ、外部からの影響を排除して異常検出を精度よく行える稼動体の異常検出方法及び異常検出システムを提供する。
【解決手段】稼動体1のデータを継続して収集し、稼動体1のイベントを検出し、上記イベントで区切られた所定期間内に収集される上記データを対象データとして抽出し、あらかじめ異常検出のための比較用データを用意しておき、上記対象データと上記比較用データとを比較し、その比較結果に基づいて稼動体1の異常を検出する。
(もっと読む)
電動パワーステアリング装置
【課題】 アイドリングストップ機能によりエンジンが自動停止あるいは自動再始動しているときでも、充分な操舵アシストが得られるようにする。
【解決手段】 主電源100からモータ駆動回路31への電源供給路107に、スイッチ111を介して副電源50を接続する。電源制御部32bは、アイドリングストップECU201がアイドリングストップ制御を実行しているとき(エンジンの自動停止中および自動再始動中)、スイッチ111をオン状態にして副電源50により主電源100の電源供給を補助する。また、アイドリングストップ制御中であっても、操舵ハンドル11が回動操作されていないときには、スイッチ111をオフ状態に維持する。
(もっと読む)
運転支援装置
【課題】ドライバの運転意思低下時に適切な運転支援制御を行う運転支援装置を提供する。
【解決手段】自車両前方の環境を認識して操舵機構に操舵力を付与する操舵制御、及び、自車両を減速させる減速制御を行う運転支援装置を、自車両の走行車線を認識する車線認識手段110と、走行車線内に設定された目標走行位置に沿って自車両が走行するように目標操舵力を設定する目標操舵力設定手段140と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段160と、自車両を減速させる減速制御手段190と、ドライバの運転意思低下を判定する運転意思判定手段180とを備え、操舵制御手段は、運転意思低下の判定に応じて操舵力の付与を中止し、減速制御手段は、運転意思低下の判定に応じて自車両を減速させる構成とする。
(もっと読む)
操舵支援装置
【課題】操舵機構に付与される操舵力とドライバの操舵操作との干渉時に積分制御を適切に終了する操舵支援装置を提供する。
【解決手段】操舵支援装置は、環境認識手段110と、目標走行位置設定手段120と、自車横位置認識手段130と、目標走行位置に対する自車両の横位置の偏差算出手段140と、偏差積分手段150と、偏差の積分値に基づく目標操舵力設定手段180と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段190と、操舵操作力検出手段23と、目標操舵力の方向と操舵操作力の方向とが異なったときに、偏差積分手段150による積分値の加算を停止させる積分停止手段181と、自車両に対外力推定手段170とを備え、操舵力設定手段180は、偏差積分手段が積分値の加算を停止した後、所定の積分停止時間の経過後に積分値に基づいた操舵力を低下させるとともに、横方向外力の増加に応じて積分停止時間を延長する構成とする。
(もっと読む)
車両挙動制御装置
【課題】摩擦円の影響が小さい緩加速時やアクセルオフ等での不必要な車両制御を防止して、違和感無く自然で扱いやすい車両挙動を実現すると共に、各輪のグリップ状態を監視して、必要な運転領域では確実に、限界領域における車両挙動の安定性を確保する。
【解決手段】制御部50は、前後軸の接地荷重に基づく第1のステア特性量A1と摩擦円の限界を考慮した第2のステア特性量A2を演算し、A1≧A2の場合は、エンジントルク制御、及び、舵角制御を禁止する。また、A1<A2の場合は、第1のステア特性量A1と第2のステア特性量A2の差分を考慮した、エンジントルク制御、及び、舵角制御を実行する。
(もっと読む)
車両制御装置
【課題】電力が確保されている状態であるエンジン停止前までに左右車輪についての中立復帰を行う車両制御装置を提供する。
【解決手段】車両制御装置は、左右後輪RW1、RW2を転舵するための電動モータ21を備えている。電動モータ21は、後輪転舵制御回路34により制御され、左右後輪RW1、RW2を目標舵角に転舵する。後輪転舵制御回路34は、イグニッションスイッチ37がオン状態からオフ状態へ切換られたことに応答して、電動モータ21を駆動して左右後輪RW1、RW2を中立位置に復帰させ、中立位置に復帰が完了した後にエンジンEを停止する。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、適切に障害物を回避することを可能とする。
【解決手段】車両の制御装置は、運転者が車両を実際に操舵した実操舵量を取得する取得手段(100等)と、取得された実操舵量に応じた操舵力を前記車両の少なくとも前車輪に付与する付与手段(17)と、車両の進行方向における障害物を検知する検知手段(21)と、検知された障害物と前記車両とが衝突する衝突時間を算出する算出手段(100)と、算出された衝突時間に基づいて、障害物を回避するために目標となる目標操舵量の所定範囲を特定する特定手段(100)と、取得された実操舵量が所定範囲内にある場合、操舵力を付与するように付与手段を制御し、取得された実操舵量が所定範囲内にない場合、操舵力に加えて障害物の回避を補助するための補助操舵力を付与するように前記付与手段を制御する制御手段(100)とを備える。
(もっと読む)
モータ制御装置およびパワーステアリング装置
【課題】 運転者に与える違和感を低減したモータ制御装置を提供する。
【解決手段】 回転軸位置検出手段のポジション信号が正常のとき、ポジション信号に基づきモータの電気子コイルに通電する電流を制御し、ポジション信号の異常が検出されたとき、この異常が検出されたときよりも前のポジション信号に基づき、電気子コイルに通電する電流を制御する通電制御手段を有することとした。
(もっと読む)
パワーステアリング制御装置
【課題】ステアリングに対するアシスト特性を車両の運転状態に合わせて適正に設定することができるようにする。
【解決手段】モータ制御部72には、E/G_ECU22に格納されている異なるエンジン出力特性を有するエンジン制御モードM(ノーマルモードM1、セーブモードM2、パワーモードM3)に対応して、異なるアシスト特性を有するパワステアシストモードMs(パワステノーマルモードMs1、パワステセーブモードMs2、パワステパワーモードMs3)を有しており、E/G_ECU22で設定されているエンジン制御モードMを読込み(S37)、このエンジン制御モードMに対応するパワステアシストモードMsを設定し(S41)、設定したパワステアシストモードMsに格納されているアシスト特性に基づいて目標アシストトルクτpを設定する。
(もっと読む)
電動パワーステアリング装置
【課題】車両応答の悪化を抑制しつつ、操舵フィーリングの悪化をも防ぐ。
【解決手段】車両転舵制御装置(10)は、ドライバの操舵入力に応じた操舵トルク及び操舵角の少なくとも一方に基づいて、操舵入力を補助するためのアシスト操舵力を算出する第1算出手段(30)と、アシスト制御力を操舵入力における操舵トルクに付与する操舵力付与手段(10)と、アシスト操舵力を付与された操舵トルクに対する車両挙動又は操舵入力における操舵角の特性が、(i)操舵入力における操舵周波数fが所定値以下となる範囲のうちの少なくとも一部において、操舵周波数fが所定値以下となる範囲のうちの他の一部における操舵トルクに対する車両挙動又は操舵角の特性よりも増大し、且つ、(ii)操舵周波数fが所定値以上となる範囲において、操舵周波数fが大きくなるほど低減するように、第1算出手段を制御する操舵力制御手段(30)とを備える。
(もっと読む)
パワーステアリング装置
【課題】イグニッションスイッチがOFF状態となっている間に油圧回路の圧力が低下した際の操舵アシストの応答性低下を防止したパワーステアリング装置を提供する。
【解決手段】オイルポンプ駆動用の電動モータ10を駆動制御するコントロールユニット20が、イグニッションスイッチ21がONとなった後、アシスト駆動トルク算出手段29の算出したアシスト駆動トルク値TAに基づいて電動モータ10を駆動制御する操舵アシスト制御を開始する前に、昇圧駆動トルク算出手段30の算出した昇圧駆動トルク値Tiに基づいて電動モータ10を駆動制御する昇圧制御を行い、リザーバタンクから油圧回路内に作動油を吸入して当該油圧回路の圧力を予め高める。
(もっと読む)
車両用操舵装置
【課題】左右の転舵輪を独立してスリップ角制御することができると共に、左右の一方の転舵アクチュエータに異常が発生した場合にフェイルセーフ動作を確保することができる車両用操舵装置を提供する。
【解決手段】運転者が操舵する操舵機構2と、該操舵機構2とは切り離されて転舵輪3FL,3FRを転舵する転舵機構4とを有し、前記転舵機構4は、左右の転舵輪に対して個別に転舵力を付与する転舵アクチュエータ43L,43Rを有する一対の転舵部と、該一対の転舵部間を連結する可動抵抗を与えながら可動可能な連結部材44とを少なくとも有する。
(もっと読む)
電動パワーステアリング装置
【課題】 電動パワーステアリングECUにサーミスタを追加することなく、ECUの雰囲気温度を検出し、モータへの供給電流を制限してモータの発熱を抑え、ECUのモータ制御装置を過熱から保護すること。
【解決手段】 電動パワーステアリング装置1において、モータ電流検出装置34が検出したモータ10に流れる電流と、エンジン制御用温度検出手段60が検出したエンジンルーム内の温度に基づき、モータ10への供給電流を制限するモータ目標電流抑制処理手段45を有してなるもの。
(もっと読む)
車両挙動制御装置
【課題】より確実に車両が障害物に衝突する能力を確保できる車両挙動制御装置を提供すること。
【解決手段】車両に設ける車両挙動制御装置に、電力によって作動すると共に車両走行時における障害物への衝突回避の支援が可能な複数の制御デバイス3と、制御デバイス3を作動させることにより衝突回避の支援の制御を行なうと共に複数の制御デバイス3を作動させる電力が不足している場合に障害物への衝突回避の効果が高い制御デバイス3に優先して電力を供給する制御をする衝突回避支援制御部82と、を備える。これにより、複数の制御デバイス3を作動させる電力が不足している場合には、障害物への衝突回避の効果が高い制御デバイス3に優先して電力を供給する制御を行なうため、電力不足の場合でも、障害物を回避し易くすることができる。この結果、より確実に車両が障害物に衝突する能力を確保することができる。
(もっと読む)
車両挙動制御装置
【課題】より確実にロールオーバーを抑制できる車両挙動制御装置を提供すること。
【解決手段】車両が有するECU60に、ロールオーバーが発生する危険性があるかを判定可能なロールオーバー判定部68と、ロールオーバーが発生する危険性があると判定された場合に車両の前輪の舵角を旋回方向と反対方向に操舵する制御であるカウンターステア制御が可能な舵角制御部66と、ロールオーバーが発生する危険性があると判定された場合に車両の加速制御が可能な駆動力制御部71とを設ける。これにより、ロールオーバーが発生する危険性があると判定された場合には、カウンターステア制御と加速制御とを行ない、旋回方向の反対方向のヨーレートを大きくすることができる。つまり、ロールオーバーさせようとする力を打ち消す方向の力を発生させることができる。この結果、より確実にロールオーバーを抑制することができる。
(もっと読む)
ステアリング制御装置
【課題】例えば、車両の据え切り時に要する操舵トルクを低減する。
【解決手段】第2アシスト特性曲線L2は、ステアリングの据え切り領域R1において、操舵トルクMTに対するアシストトルクの変化率が、第1アシスト特性曲線L1に基づいて特定されるアシストトルクの変化率より大きいため、操舵トルクMTに対して第1アシスト特性に基づいてアシストトルクを特定する場合に比べて、操舵トルクMTに対して相対的に大きなアシストトルクを出力可能な条件に設定されている。ステアリングの据え切り領域R1において、据え切り領域R1において運転者によって操舵トルクMTを急激に増大させなくても、車輪等の操舵輪の操舵が可能になり、操舵トルクMTが増大することによって運転者が感じる違和感を低減できる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】イグニッション信号回路の断線故障やエンストが発生した場合においても、ハンドル操舵の操舵トルクやモータ角速度の大きさにより判定を行うだけでなく、動作される継続時間とを比較して判定することにより、より信頼性の高い電動パワーステアリング装置の制御装置を提供する。
【解決手段】操舵トルクに基づいて電流指令値を演算し、電流指令値により操舵補助を付与するモータをフィードバック制御する電動パワーステアリング装置の制御装置において、操舵トルクの異常を判定して第1アシスト停止信号を出力するトルク信号監視部と、モータの角速度を検出するモータ角速度検出部と、角速度の異常を判定して第2アシスト停止信号を出力するモータ角速度監視部と、第1及び第2アシスト停止信号が入力されたときにモータ駆動を停止してアシスト停止とするアシスト停止部とを設ける。
(もっと読む)
1 - 20 / 52
[ Back to top ]