
Fターム[3D232EB13]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵力 (2,579) | 保舵力 (70)
Fターム[3D232EB13]に分類される特許
1 - 20 / 70
電動パワーステアリング装置
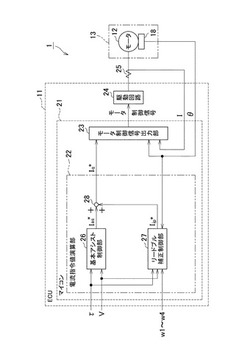
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
操舵制御装置

【課題】操舵制御装置において、車両が路面の轍や落下物を通過して車両の進路に影響するような外乱が入ったとしても、車両の安定性を確保して直進を継続しやすくすることにある。
【解決手段】操舵用制御手段(12)は、判定手段(12A)により運転者が操舵ハンドル(6)を握っていないと判定された時に、操舵ハンドル(6)をセンター位置に維持するように操作力軽減アクチュエータ(10)の作動を制御する制御信号をアクチュエータ制御手段(11)に出力する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供することにある。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルクとの間のトルク偏差Δτに基づいてγ軸電流増減値を演算し、当該γ軸電流増減値を積算することによりγ軸電流指令値Iγ*を演算する。そして、そのγ軸電流指令値Iγ*には、下限値が設定される。
(もっと読む)
電動パワーステアリング装置およびこれを備えた車両
【課題】誤組判定を行うことで安価な電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、車両1の操舵操作をアシストする電動パワーステアリング装置Sであって、運転者が操作するステアリングホイール3と、ステアリングホイール3の回転角度を検出するステアリングホイール回転角度検出手段と、車両1の転舵輪2l、2rを操舵するアシスト力を伝達するステアリングアシスト力伝達手段5と、ステアリングアシスト力伝達手段5に接続され、アシスト力を付与するモータ7と、モータ7の回転角度を検出するモータ回転角度検出手段と、モータ7を制御するステアリング制御手段8とを備え、ステアリング制御手段8は、ステアリングホイール3の回転角度とモータ7の回転角度とを基準減速比と比較し、ステアリングアシスト力伝達手段5とステアリング制御手段8とが適合しているか否かを判定する適合判定手段を有する。
(もっと読む)
後輪トー角制御装置
【課題】直進走行時であっても外乱に対する直進走行性を有効に高めることのできる車両挙動制御を提供する。
【解決手段】電動パワーステアリング装置を備え、後輪5l、5rのトー角可変制御される後輪トー角可変式の自動車Vに設けられ、後輪のトー角の制御に供される後輪トー角制御装置において、ヨーレートを検出するヨーレートセンサと、横加速度を検出する横加速度センサとを備え、検出されたヨーレートと横加速度とに基づいて、外力Fpの働く位置が車体重心CGよりも前方である場合、後輪5のトー角をトーイン側に設定し、外力Fpの働く位置が車体重心CGよりも後方である場合、後輪5のトー角をトーアウト側に設定する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
移動体の操舵反力調整装置
【課題】運転者の疲労状態により適した操舵反力に近づくように当該操舵反力を調整可能とすることを目的とする。
【解決手段】操舵反力用コントローラ6は、筋力検出部11と、疲労推定部12と、反力調整部13とを備える。筋力検出部11は、筋骨格モデルとアドミタンス計測手法をもちいて、運転者の肩部から手までに位置する腕の筋肉のうちから選択した複数の筋の筋力を推定する。そして、推定した複数の筋の疲労度と操作子の操舵状態とに基づき、操作子に付加する操舵反力を調整する。
(もっと読む)
差動制限機構の制御装置
【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
パワーステアリング装置
【課題】スリップ発生時に生じるトルクステアを抑えられるパワーステアリング装置を提供する。
【解決手段】コントローラがパワーステアリング出力部に供給される作動油の流量を制御する車両のパワーステアリング装置であって、車両が雪道やぬかるみ等の滑りやすい路面上を走行する際に、左右の車輪の一方が路面に対して滑るスリップが生じるとスリップ時指令値I3が高まり、スリップ時指令値I3に基づいてパワーステアリング出力部に供給される作動油の流量が制御される構成とした。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での発進時あるいは加速時において、適切な操舵補助力を付加することで操舵反力を相殺し、車両の悪路走破性と安定性の向上を図る。
【解決手段】車両の姿勢が不安定になるような特定の運転状況にある場合、電動パワーステアリングにより車両の姿勢を安定させる方向へ操舵補助力である付加トルクを付加し姿勢安定化制御を行う。このときの操舵補助力は、“ハンドル取られ”が生じたときの車体側から作用する操舵反力に対し、操舵トルクセンサ値と電動パワーステアリングの基本アシストトルクの比例制御および積分制御により演算して求め、操舵トルクセンサ値が零となるようなステアリングトルクを電動パワーステアリングの付加トルクとして与える。また、付加トルクの上限値を、LSDの拘束トルクをもとに規定し、前記付加トルクを制限することにより、LSD作動に伴う操舵反力変化を抑制する。
(もっと読む)
車両用操舵制御装置
【課題】 運転者の意図しないステアリング操作を回避し、運転者に違和感を与えることのない車両用操舵制御装置を提供すること。
【解決手段】 運転者によって操舵されるステアリングの操舵状態に応じて操向輪を転舵する転舵手段と、ステアリングに操舵反力を付与する反力付与手段と、を備えた車両用操舵制御装置において、運転者の意図しない操舵操作が発生する状況を検出したときは、ステアリング操舵角の変化を抑制するように操舵反力を付与することとした。
(もっと読む)
車両用操舵装置
【課題】運転者の操舵フィーリングを向上させる。
【解決手段】車両用操舵装置は、操舵ハンドル(11)に付与すべき目標操舵反力を操舵角及び車速に基づいて設定し、目標操舵反力を付与する反力制御を行う車両用操舵装置であって、操舵ハンドルの操舵速度を特定する操舵速度特定手段(120)と、操舵速度特定手段によって特定された操舵速度の絶対値の大きさに応じて目標操舵反力の大きさを変更する目標操舵反力変更手段(110)とを備える。
(もっと読む)
車載用モータ制御装置
【課題】一般的な入力オフセットを有する増幅回路を用いて、入力オフセットを的確に補正し、且つ、機能安全の面において優れたモータ電流検出手段を備えたモータ制御装置を提供すること。
【解決手段】モータ制御装置は、増幅手段9の入力オフセットを補正する入力オフセット補正手段を少なくとも二つ以上備え、これら複数の入力オフセット補正手段の中から状況に応じたものを選択して、その選択したものを用いて入力オフセットを補正する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵トルクセンサを用いて操舵アシスト力と旋回保舵判定を行い、車輌が高速にて旋回保舵走行する場合に於ける操舵アシスト力を低減することで、安価な構成の電動パワーステアリング装置としながら、必要な保舵力が低減されて運転者の保舵負担を軽減することが可能な電動パワーステアリング装置を提供する。
【解決手段】操舵トルクセンサからの操舵トルク検出値と車速信号を用いて、旋回保舵判定部からの判定結果に基づいて保舵アシスト力設定部の出力ゲインを調整し、旋回保舵時の操舵アシスト力を増加させる。
(もっと読む)
電動パワーステアリング装置
【課題】ドライバーが感知した車両の横流れを、ドライバーの意図に合った横流れ補正を行うことで、運転操舵の疲労感を軽減し、安全に走行できる電動パワーステアリング装置を提供する。
【解決手段】ハンドルに作用する操舵力を検出するトルクセンサと、トルクセンサから出力されるトルク検出値に基づいてモータを駆動し、車両の操舵系に操舵補助力を付与するようにした電動パワーステアリング装置において、トルクセンサから出力されるトルク検出値をドライバー自身が補正することができるスイッチを備えた電動パワーステアリング装置とし、車両の走行状態に合わせて、運転席に設置されたスイッチにより、トルクセンサからの操舵トルク検出値を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合において、操舵フィーリングの低下を抑制する。
【解決手段】電動モータの端子電圧Vu,Vv,Vwと相電流Iu,Iv,Iwと操舵トルクTrの符号とから誘起電圧eを算出し推定角速度ωmを求める(S11〜S15)。推定角速度ωmがゼロ近傍範囲に入っている場合(S16:Yes)には、操舵トルクセンサの回転角θt1を読み込みんで、その変化量Δθt1を算出する(S18〜S19)そして、変化量Δθt1を電気角の変化量に換算した角度Δθet1だけ推定電気角θebを変化させる(S20〜S21)。これにより、保舵状態を解除する場合でも、電動モータがスムーズに回り始める。
(もっと読む)
電動パワーステアリング装置
【課題】タイヤが縁石に当接した場合でもトルク伝達部材に伝達される衝撃力を確実に抑制することができる電動パワーステアリング装置を提供すること。
【解決手段】モータ回転角速度ω及びモータ回転角加速度αのそれぞれが、対応する所定値ωs、αs以上の場合、異常外力判定部は、所定値以上の外力がステアリング機構に入力されたと判定して、異常外力判定フラグ(FLG)を1にする。d軸電流指令値演算部は、入力される異常外力判定フラグ(FLG)が1の場合、モータ回転角速度減速部を有効とし、モータ回転速度/d軸電流指令値マップに基づいて強め界磁制御を行う。
(もっと読む)
車両制御システム
【課題】自車の進路上の障害物を回避する際に、ドライバの保舵状態の違いによって車両挙動制御装置の制御が影響を受けることを抑制して、障害物回避能力を向上させる。
【解決手段】操舵角に基づいて車両の挙動を制御するEPSコントローラ1、VSAコントローラ2、RTCコントローラ3、及び左右駆動力配分コントローラ4と、自車の進路上の障害物を検知するレーダー装置18と、障害物を回避するドライバの操作を判別して各コントローラを制御する障害物回避制御部5とを有し、この障害物回避制御部が、ドライバの保舵状態が変則的か否かを判別して、保舵状態が変則的である場合には、障害物回避制御中に各コントローラの制御値が増大補正されるように制御する構成とする。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなくラトル音の発生を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】不感帯域マップが基本アシスト特性から右アシスト方向にオフセットしたアシスト特性、及び、左アシスト方向にオフセットしたアシスト特性を併有するECUにより、モータに微小な回転トルクを生じさせ、駆動ギヤ及び従動ギヤ間でバックラッシュがない状態とする。この状態では、路面から逆入力があっても、両ギヤは互いに当接した状態を維持することができるので、ラトル音の発生を抑制することができる。また、ECUは、左右いずれか一方の操舵トルクの絶対値が増大して所定値(T0,T3の絶対値)より大きくなった後、当該所定値より小さい状態に戻るときは、アシスト方向が反転する方のアシスト特性を選択することにより、違和感の無い滑らかな操舵感を実現する。
(もっと読む)
摩擦状態推定装置
【課題】 直進走行時や急旋回走行時等における誤推定を抑制した摩擦状態推定装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS31で直進走行フラグFsr,急旋回走行フラグFft,急制動フラグFpb,オーバステアフラグFos,バンク走行フラグFbrが全て0であるか否かを判定し、この判定がYesであればステップS32で実ヨーレイトγrを標準ヨーレイトγeで除すことにより路面μの今回値μnを推定/出力する。一方、各フラグFsr,Fft,Fpb,Fos,Fbrのうち少なくとも1つが1であり、ステップS31の判定がNoとなると、ATTS−ECU16は、ステップS33で路面μの前回値μn−1を今回値μnとしてそのまま出力する。
(もっと読む)
1 - 20 / 70
[ Back to top ]