
Fターム[4C097TA10]の内容
補綴 (46,288) | 義肢・身体装着伸長具 (315) | 身体装着又は身体装着伸長具の構造 (92)
Fターム[4C097TA10]に分類される特許
81 - 92 / 92
飲食用補助具

【課題】手指の不自由な人であっても飲食を容易に行なう事ができる飲食用補助具を提供する。
【解決手段】手に把持される柄部と、この柄部の一端から突出させた支軸と、同支軸の先端部に取り付けられたスプーン体又はフォーク体とを備え、前記支軸を前記柄部に回動自在に取り付けた飲食用補助具であって、前記柄部は、前記支軸を固定してこの支軸の回動を停止するためのストッパーを備えた。
(もっと読む)
ロボット、および、そのロボットとともに使用される携帯可能な記憶媒体

【課題】一台のロボットを種々の人間が容易に兼用できるようにするとともに、また、ロボット制御のための駆動情報を使用者の日頃の動作状態に応じて最適な値に設定できるようにする。
【解決手段】外部環境から加えられた外力や変位に基づいてロボット本体1を駆動制御する場合、まず、使用者の携帯可能な記憶媒体3に、インピーダンス制御用の慣性係数M、粘性係数D、剛性係数K、ロボット本体1の初期形状、ロボット本体1の動作範囲、補助力、手先の位置、手先の動作速度に関する駆動情報を記憶しておく。そして、この記憶媒体3から駆動情報を無線で読み出し、これらの駆動情報を用いてロボット本体1を駆動する。また、このロボット本体1の動作結果に関する情報として、慣性係数、粘性係数、剛性係数、動作範囲、補助力、手先の動作位置、手先の動作速度など情報を記憶媒体3に記憶させる。
(もっと読む)
整形外科装具用の制動ヒンジ
整形外科装具用の制動ヒンジ(20)を提供する。ヒンジは、1つのアーム(22、24)に固定されたアクチュエータ(58)、および少なくとも1つのばね部材(80)を含んでいる。アクチュエータを有するアームが、第1の方向に回動すると、所定の屈曲角度において、アクチュエータは、ばね部材に力をかけて、その結果、ばね部材が撓む。ばね部材は、アクチュエータをばね部材から遠ざける方へ付勢し、アームを第1の方向と逆の第2の方向に付勢する力を、アクチュエータにかける。好ましい実施形態では、ばね部材には、複数の平坦な板状の板ばねが含まれる。支点部(104)を移動させ得ることによって、ばね部材がアクチュエータにかける力を調節し得る。大きさが異なる種々のアダプタ(66)をアクチュエータに固定し得る。アダプタ(66)のサイズによって、ばね部材が最初にアクチュエータに力をかける屈曲角度が決定される。 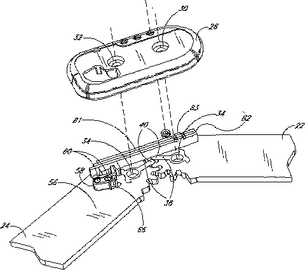 (もっと読む)
(もっと読む)
着用形関節駆動装置
着用形関節駆動装置においては、複数のフレーム体が、被着用体の外面に接触するように被着用体に装着される。フレーム体間には、流体圧式アクチュエータが取り付けられる。流体圧式アクチュエータは、膨張収縮体と、膨張収縮体の外周を覆う網状の被覆体とを有している。流体圧式アクチュエータは、膨張収縮体が膨張することにより長さが縮小されて駆動力を発生する。フレーム体は、所定の剛性を有している。  (もっと読む)
(もっと読む)
歩行装置
【課題】二足歩行用ロボットに使用される歩行装置であって、大きな負荷に耐え得るだけでなく安定した歩行動作を達成し得るように構成され、しかも設計上の自由度に優れた歩行装置を提供する。
【解決手段】歩行装置は足部10と、腰部12と、該足部及び腰部の間に設けられた脚部14とを具備する。脚部14は下腿部リンク機構16と、この下腿部リンク機構16に膝関節手段22A、22B、22C、22Dを介して接続された大腿部リンク機構18とから構成され、下腿部リンク機構18は足首関節手段20A、20B、20Cを介して足部に連結され、大腿部リンク機構18が股関節手段24A、24B、24Cを介して腰部12に連結される。腰部12には直線駆動手段26A、26Bと、回転駆動手段28が保持され、この駆動手段が足部を上下方向、前後方向及び左右方向のそれぞれに選択的に駆動させるべく大腿部側駆動リンク部材に組み込まれる。
(もっと読む)
膝義肢
本発明は、一対の関節丘滑り面(5)を形成する大腿義肢部(1)と、関節丘滑り面(5)と協働する頸骨滑り面(9)を有する頸骨部(2)と、頸骨部に概ね平行な回転軸(12)の回りを回転可能に、大腿部と頸骨部(1,2)とを互いに連結する結合部材(10)とを備えた膝義肢に関する。大腿部と頸骨部(1,2)とが同じソケット前後方向配置を有する場合には、頸骨滑り面(9)の中央領域(14)により負荷が移動させられる。本発明によれば、頸骨滑り面(9)は、上記の標準接触領域(14)の前部と後部において上方に傾斜しており、それにより、2つの義肢部材(1,2)が互いに回転する時、上記の標準接触領域(14)の前部と後部において、上記の各関節丘滑り面が対応する頸骨滑り面と接触状態を維持している。  (もっと読む)
(もっと読む)
複数の加圧チャンバを有する補綴ソケット直接注型装置
【課題】
【解決手段】 本発明の補綴ソケット注型装置は、前方側面を備えた基部を有し、この前方側面から、中央の注型領域を囲む膨張可能なブラダーが延びている。ブラダーは、ブラダーの内側でその長さにほぼ沿って延び、中央の注型領域を周方向に囲んでいる膨張可能な複数の内側チャンバを有する。これらチャンバの内壁は、柔軟で流体不浸透性の比較的薄いシート材料で形成されている。この材料は、チャンバの空間が加圧されると伸張可能である。ブラダーはまた、材料で形成された外側カバー、即ち、壁部か、ブラダーの外方への伸張を拘束する構造物かを有している。これらチャンバは、硬化可能な補綴ソケット材料が上に配置された義足が圧力下で注型および硬化されるように配置され得る中央の注型領域を圧迫するように、義足加圧された空気または他の流体を用いて膨張可能である。 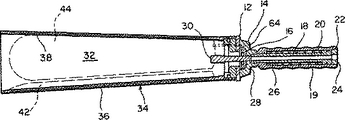 (もっと読む)
(もっと読む)
装着型パワーアシスト装置
【課題】 関節を急角度に折り曲げるといった類の変位の大きな動作であっても支援することができ、安全性や人間親和性にも優れた装着型パワーアシスト装置を提供する。
【解決手段】 装着型パワーアシスト装置(手首用パワーアシスト装置40)を、流体受容部に流体が供給されると湾曲するチューブ状のアクチュエータA1と、アクチュエータA1を身体の支援対象部(手首関節)に沿わせて装着する装着部41,42とを備えたものとした。流体受容部は、アクチュエータA1の長手方向に沿って延在している。アクチュエータA1には、アクチュエータA1の一側面の長手方向に沿った伸長を拘束する拘束手段が設けられている。
(もっと読む)
動作制御式足ユニットのためのシステム及び方法
肢の動きに関連するシステム及び方法。一例では、補装具システム又は矯正具システムのようなシステムは、足ユニットと下肢部材との間の角度を積極的に制御又は調節するアクチュエータを備える。処理モジュールは、センサモジュールから得たデータをもとにアクチュエータの動きを制御する。例えば、検出するモジュールのデータは、使用者の歩行に関連する情報を含み、健常な足首の自然な動きを実質的にまねるように足ユニットを調節するために使用される。さらに、このシステムは、例えば、平地での歩行、階段の上下歩行、傾斜面の上下歩行や使用者の他の種々の動きに対応できる。更に、処理モジュールは、使用者による入力信号を受信したり外部インターフェースにより出力信号を表示してもよい。例えば、処理モジュールは、その使用者による踵の高さの入力を受信してもよい。  (もっと読む)
(もっと読む)
関節式の人工指アセンブリ
切断された指の残っている部分により制御されることができる関節式の人工指アセンブリが、開示される。指が存在しない場合、隣接した指が装置を操作するために用いられる。指株または隣接した指が、第1の指関節で曲がり始める場合、残りの装置は運動に反応し、人間の指の自然の方法で屈曲する。
 (もっと読む)
(もっと読む)
人工の脊椎円板移植器具および方法
椎間円板腔作成ガイド(118)は、第1の凹部(131)と、第1の穴を備える第1の加工ガイド(120)とを有するスペーサ部分(130)を備える。第1の穴(120)および第1の凹部(131)は、位置合わせされて第1の骨除去機構(144)を受け入れるようになっている。 (もっと読む)
人工乳房
【課題】連続多孔質シリコーンゴム成形体の使用により、吸汗性乃至通気性を付与して、装着した皮膚面の汗によるべたつき、かぶれ、発疹等を防止し、装着した皮膚面を衛生的に保護できるようにした人工乳房を提供する。
【解決手段】水溶性有機物質の粒粉物と水溶性有機物質の液状物との混合物を加えて均一混合した室温加硫型シリコーンゴムを、注型して硬化成形したのち、成形体を水に浸漬して、水溶性有機物質の粒粉物と水溶性有機物質の液状物とを流出させ、乾燥して連続多孔質成形体としたもの。
(もっと読む)
81 - 92 / 92
[ Back to top ]