
Fターム[5B057BA17]の内容
Fターム[5B057BA17]に分類される特許
1 - 20 / 353
情報処理装置、情報処理装置の制御方法、およびプログラム
三次元計測方法、三次元計測装置及び三次元計測プログラム
情報処理装置、情報処理装置の制御方法、およびプログラム
環境認識装置
投影装置、3次元計測装置並びにその制御方法およびプログラム
同期されたユーザインタフェース機能を含むマシンビジョンシステムプログラム編集環境
情報処理装置、情報処理装置の制御方法、およびプログラム
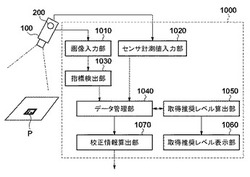
【課題】センサ校正に関する知識やノウハウのない作業者であっても、センサ校正用入力データを容易に取得し、精度よく校正を行うための校正用入力データであるか否かを容易に判断できるようにする。
【解決手段】撮像装置に対する位置姿勢センサの位置または姿勢を校正するための校正用入力データを処理する情報処理装置であって、撮像装置により撮像された画像を取得する画像取得部と、画像から指標情報を検出する指標検出部と、位置姿勢センサにより計測された位置姿勢センサ自身の位置または姿勢の計測値を取得する計測値取得部と、指標情報と計測値とを含む校正用入力データの推奨レベルを、指標情報と計測値とに基づいて算出する算出部と、推奨レベルを提示する提示部と、を備える。
(もっと読む)
画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境

【課題】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境を提供する。
【解決手段】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのためのマシンビジョンシステム編集環境が提供される。一形態では、新しい共通シンタックス及び表現が利用され、2つのステージで実行されるパートプログラムを実行し、そのような連続画像取得動作が通常動作と同じ方法で記録される。最初のステージでは、画像取得の連続ストリームを持つパートプログラムの一部が画像取得動作のためにスキャンされ、画像取得プロセスが開始された後に、画像を取得するために最も効果的な命令が決定される。そして、第2のステージでは、画像取得プロセスが実行されている間に、パートプログラムの一部が再度スキャンされ、そして画像解析動作が実行される。
(もっと読む)
マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法
【課題】マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法を提供する。
【解決手段】パートプログラムの編集初期化ブロックを定義及び利用する方法が提供される。パートプログラムは、一部を測定するための複数のステップを備え、編集インタフェースに表示される。編集インタフェースに、編集初期化ブロックに含めるステップを選択する選択肢が提供される。パートプログラムが保存された後に、編集のためにパートプログラムが呼び出されると、追加のステップがパートプログラムに追加される前に編集初期化ブロックが実行され得る。編集初期化ブロックにない初期パートプログラムステップによって取得されたデータの少なくともいくつかは、編集初期化ブロックを実行して決定されたデータに関連する推定データに基づいてもよい(例えば、基づいて変更されてもよい)。
(もっと読む)
画像処理装置および画像処理方法
【課題】光沢が含まれる画像部分が形状生成に用いられず有効利用されない。
【解決手段】多視点で撮影した画像データから多視点画像間での対応領域を検出して被写体の三次元形状データを生成する。そして、対応領域のうち光沢のある光沢画像領域を示す光沢領域データを生成して、多視点画像データの光源の特性データを生成する。
(もっと読む)
運転支援装置
【課題】ドアの開放による自車の外形輪郭の変化にも対応可能で、運転者からの死角領域の発生も抑制される、俯瞰画像表示タイプの運転支援装置を提供する。
【解決手段】車両の周辺領域を撮影する車載カメラによって取得された撮影画像を上方仮想視点で射影変換することで撮影俯瞰画像を生成する俯瞰画像生成部と、車体を示す車体俯瞰画像を出力する車体画像出力部と、開放状態のドアを示すドア俯瞰画像における外側輪郭部以外の領域を透明化または半透明化した透明ドア俯瞰画像を出力するドア画像出力部と、撮影俯瞰画像と車体俯瞰画像と透明ドア俯瞰画像とが画像合成された運転支援画像をモニタ表示画像として生成する画像合成部とが備えられている。
(もっと読む)
細胞断面解析装置、細胞断面解析方法、及び細胞断面解析プログラム
【課題】細胞の断面形状を評価する。
【解決手段】細胞と液体とを含む系を第1の方向に移動させながら顕微鏡で焦点を合わせて観察し、鉛直方向の位置が異なる複数の合焦画像を、前記第1の方向と交差する第2の方向と前記第1の方向及び第2の方向と交差する第3の方向とにより画定される複数の2次元平面画像として撮像する撮像機構と、前記撮像機構により撮像された前記複数の合焦画像のそれぞれに対して画像を鮮鋭化する補正処理を行う画像補正部と、前記画像補正部により補正された後の前記複数の合焦画像に基づいて、前記2次元平面上の任意の点を通り、前記第2の方向又は前記第3の方向のいずれかの断面を、前記複数の合焦画像をつなぎ合わせるように再構成し疑似断面画像を生成する画像処理部と、を有することを特徴とする細胞断面解析装置。
(もっと読む)
障害物検出装置及びプログラム
【課題】簡易な構成で、前方に存在する障害物を精度よく検出することができるようにする。
【解決手段】前照灯投光装置によって、光が照射される照射領域の上端部であるカットライン境界部分の明度が変化するように前方を照射する。撮像装置12によって、自車両の前方を撮像する。カットライン検出部20によって、撮像された画像から、高さ方向の輝度変化に基づいて、カットライン境界部分のエッジ対を検出する。障害物検出部22によって、検出されたカットライン境界部分のエッジ対の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
画像処理方法
【課題】予め基準となる画像データを保持する必要がなく且つ簡易に、光軸と穴の中心軸との位置ずれを補正して、パノラマ展開画像に変換することが可能な画像処理方法を提供する。
【解決手段】環状画像から内円及び外円を抽出する工程と、抽出した内円及び外円の中心をそれぞれ求める工程と、極座標変換する際に基準となる展開中心を、内円中心と外円中心との間で順次移動させながらパノラマ展開画像に変換する工程とを備える。これにより、全方位撮像装置10により穴Hの側壁面を撮像した環状画像をパノラマ展開画像に極座標変換する際に、全方位撮像装置10の光軸L1と穴Hの中心軸L2との位置ずれに起因する歪みを補正することができる。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
非固定カメラの動的パラメータ推定方法およびプログラム
【課題】非固定カメラ映像中の2次元座標と、対象空間における特定平面上の世界座標間で成立する射影関係(平面射影行列)を、時間軸方向の相関に基づき動的に推定する。
【解決手段】特定フレームに関する射影行列を推定し、射影行列が推定済みのフレームと未推定のフレーム間の対応点を複数抽出し、抽出された対応点に基づいて、未推定のフレームでの射影行列を推定することで、非固定カメラ画像中の2次元座標と、対象空間の3次元世界座標との間で成立する射影行列を推定する。
(もっと読む)
デュアルデジタルカメラセンサを備えたモバイルデバイス及び使用方法
【課題】2つのセンサから取得された画像を合成して高度なアプリケーションをサポートする。
【解決手段】モバイルデバイス100は、第1のセンサ102と、第2のセンサ104と、センサ位置コントローラ106と、カメラ処理パイプライン108とを含む。パイプラインは、例えばモザイク除去、レンズロールオフ補正、拡大縮小、色補正、色変換、及び空間フィルタリングのような技術を実行する。センサ位置コントローラは、センサ102、104を回転、シフト、又はスライドして、2つのセンサの場所及び/又は位置を調整する。センサ102、104は、画像品質の改善、3−D画像及びビデオの視覚化、及び360度パノラマビデオの生成のような機能をもつ。
(もっと読む)
面法線計測装置、面法線計測システム及び面法線計測プログラム
【課題】物体表面の反射特性に鏡面反射成分を含むことを必要とせず、物体表面までの距離の計測も必要とせずに面法線を計測する。
【解決手段】面法線計測システム1は、ガイドレールRx,Ryに沿って、互いに直行する平面内を移動して物体OBJに対する照明方向を変化させる照明装置30と、物体OBJを撮影する撮影装置40と、撮影装置40によって撮影された画像に基づいて物体OBJの表面の面法線を計測する面法線計測装置10とを備える。面法線計測装置10は、物体OBJの画像を2値化し、画素ごとに、照明方向と明暗とが対応付けられた陰影ベクトルを作成し、予め形状が既知の参照物体について作成した参照陰影ベクトルと面法線とが対応付けられたデータベースを参照して、物体OBJの陰影ベクトルと最も類似する参照陰影ベクトルに対応付けられた面法線を、その画素における面法線と推定する。
(もっと読む)
車両監視装置
【課題】車両監視装置の設置および設置後の位置調整を簡易に行うことのできる車両監視装置を提供する。
【解決手段】走行する車両を監視カメラで撮影し、撮影した画像を解析して前記車両の登録番号あるいは車色を取得する車両監視装置において、前記画像のエッジを検出し、該エッジの傾きから前記監視カメラの傾きを検出する傾き検出部と、前記画像内のナンバープレートの幅を認識し、該認識した幅と前記画像の幅をもとに前記カメラの視野幅を検出する視野幅検出部を備えた画像処理装置を備え、該画像処理装置は、検出した監視カメラの傾きおよび視野幅をもとに、前記監視カメラの傾き、およびカメラと監視対象車両位置との間隔の適否を判定し、否と判定したときその調整方向を指示する情報を表示装置に表示する判定部を備えた。
(もっと読む)
1 - 20 / 353
[ Back to top ]