
Fターム[5H303KK11]の内容
位置、方向の制御 (6,897) | 制御部、演算部の機能 (1,155) | 推定演算要素を有するもの (80)
Fターム[5H303KK11]に分類される特許
1 - 20 / 80
モータ制御装置
位置制御装置
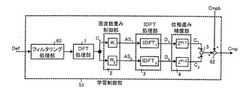
【課題】繰返し学習制御部を持つ位置制御装置において、位置偏差に多様な高調波成分が含まれる場合にも、繰返し学習制御によって、位置偏差の高い減衰性と、迅速な収束性を達成する繰返し学習制御機能を持つ位置制御装置を提供する。
【解決手段】位置偏差を離散フーリエ変換して得られたフーリエ係数ベクトルに、複数の周波数重み係数を乗じることで、周波数帯域別に成分分割し、成分毎に離散フーリエ逆変換した信号データに、最適な位相進み補償を与え加算することで、学習時の補正値データを構成する。
(もっと読む)
電動機の位置制御装置

【課題】位置指令と位置検出の差演算に基づいて位置制御すると、任意の回転方向を指定しての位置制御ができず、また検出器の分解能によっては安定に位置制御ができない。
【解決手段】位置指令と1サンプリング分遅延させた信号との偏差信号を求め、この偏差信号と回転方向を設定する信号を入力して回転方向に対応して補正された信号を出力する回転方向指定指令補正部を設ける。回転方向指定指令補正
部により補正された信号と位置検出との偏差信号を求めて位置制御信号とする。
また、位置検出器の出力側に位置座標系変換部を設けることで、任意の座標系で位置制御を可能とする。さらに、分解能補正処理部を設けることにより安定性を向上することを可能としたものである。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】停止精度の向上、停止までの所要時間の短縮化及び所要時間のばらつきの低減を、バランス良く実現可能な新しいモータ制御技術を提供する。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を実行すると共に(S180)、標準プロファイルに基づく第二制御処理によって駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pnを算出する(S150)。標準プロファイルは、駆動対象10の駆動開始時点から停止時点までの時間が一定で、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定された目標プロファイルである。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で(S170でYes)、第一制御処理に代えて第二制御処理を実行し(S200)、駆動対象を精度よく目標停止位置で停止させる。
(もっと読む)
制御装置及び方法
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】車両燃費改善のため車両のエネルギーを有効に活用するための機構及びその制御方法で、PID制御に代わる新たな制御手法として、より簡便な方法で制御結果が得られるアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】制御対象の運動エネルギーと制動可能仕事を比較し、前記制御対象の運動エネルギーと前記制動可能仕事が等しくなった時点で駆動から制動に切り替えると共に、前記制御対象の運動エネルギーと前記制動可能仕事の比較を予め設定した時刻毎に繰り返し行う「エネルギー評価制御」を行う。
(もっと読む)
軌跡制御装置
【課題】加減速の影響により送り速度が過渡的に変化するような場合でも軌跡誤差を抑制できる軌跡制御装置を得ること。
【解決手段】軌跡制御装置は、機械の可動部が複数の可動軸により駆動され、前記複数の可動軸を同時制御することにより前記可動部の軌跡を制御する軌跡制御装置であって、与えられた指令経路に対して補間・加減速を行う補間・加減速演算部と、前記補間・加減速された指令経路に応じて、前記複数の可動軸の位置指令を生成する軸分配部と、前記複数の可動軸の位置指令と前記補間・加減速された指令経路とに基づいて、軌跡誤差を補正するための補正ベクトルを演算する補正ベクトル演算部と、前記演算された補正ベクトルを用いて前記複数の可動軸の位置指令を補正する位置指令補正部と、前記複数の可動軸の位置が前記補正された複数の可動軸の位置指令に追従するように、前記複数の可動軸を同時制御するサーボ制御部とを備えている。
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
制御装置および制御方法、並びにプログラム
【課題】新たなハードウェアを必要とせず、タクトタイムを変化させることなく、振動を抑制する。
【解決手段】パラメータ生成部102は、基準距離について、予め定めた移動時間毎に、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを生成する。データベース103は、パラメータ生成部102から供給されたパラメータを記憶する。パラメータ決定部104は、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを決定する。軌道計算部105は、決定されたパラメータから軌道を計算する。本発明は、ロボットを制御する制御装置に適用できる。
(もっと読む)
アクチュエータ、モータ制御システム、及びモータ制御方法
【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置
【課題】少ない演算量で機械の振動を抑制することが可能な指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置を提供する。
【解決手段】指令発生装置20の設計方法は、関数a(t)を設定するステップと、関数a(t)をラプラス変換して関数A(s)を求めるステップと、極を定める減衰係数がそれぞれ0、かつ極を定める固有角周波数が、それぞれ関数a(t)に含まれるパワーが0の異なる周波数ωsであり、零点が、それぞれ複数の振動成分をもつシステムの各振動極であり、定常ゲインがそれぞれ1となる複数の2次の伝達関数G1(s)〜Gn(s)(nは自然数)を設定するステップと、関数A(s)と伝達関数G1(s)〜Gn(s)とを乗じて関数Fb(s)を求めるステップと、関数Fb(s)を逆ラプラス変換して関数fb(t)を求めるステップとを含む。
(もっと読む)
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
数値制御装置及び摩擦補償方法
【課題】ダブルナット予圧方式の送り駆動機構においても低速から高速の領域まで摩擦力又は摩擦トルクを高精度で推定して象限突起を補正できる数値制御装置及び摩擦補償方法を提供する。
【解決手段】本発明の数値制御装置はオーバーサイズボール予圧方式だけでなく、ダブルナット予圧方式の送り駆動機構においても低速から高速の領域まで摩擦力又は摩擦トルクを高精度で推定する。故に数値制御装置は象限突起を補正できる。象限突起は指令軌跡よりも移動軌跡が外側に出る現象である。ダブルナット予圧方式の送り駆動機構はボール螺子軸が反転して一山目の象限突起を生じる。ダブルナット予圧方式の送り駆動機構はテーブルが反転後所定量移動した時に更に二山目の象限突起を生じる。数値制御装置はダブルナット予圧方式の時に二段階で生じる摩擦力の上昇を二つの近似式を用いて高精度に推定できる。
(もっと読む)
制御システム及びこの制御システムに用いる位置推定方法
【課題】サンプリング周期を細かくすることなく、モータの速度変動等に精度よく対応することが可能な制御システム及びこの制御システムに用いる位置推定方法を提供する。
【解決手段】第2モータ43と、第2モータ43の回転角度に基づくウェハのノッチの位置データを所定の周期で検出する第2エンコーダ44と、第2モータ43をサーボ制御するサーボ制御器32と、サーボ制御器32に対して動作指令を発する位置制御部2と、を有する制御システム1において、位置制御部2は、サーボ制御器32の動作指令を生成するとともに、所定周期で第2エンコーダ44から取得した位置データを取得時刻と共に記憶し、時刻tにおける被制御体の位置f(t)を位置データに基づいてn次の多項式で表し、n次の多項式補間により任意の時刻におけるウェハ(ノッチ)の位置を推定する。
(もっと読む)
波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法
【課題】温度センサを用いずに温度変化に伴う波動歯車減速機の摩擦特性変動下における制御性能の向上を達成可能なアクチュエータの適用型摩擦補償方法を提案すること。
【解決手段】波動歯車減速機1を備えたアクチュエータ2の適応型摩擦補償法では、モータ駆動電流に印加する摩擦補償電流として、モータ軸6が偏差を持って静止した際には静止摩擦補償電流isを採用し、それ以外の場合にはクーロン摩擦補償電流icを採用する。静止摩擦補償電流isはステップ関数の補償量issに単調増加なランプ関数の補償量isrを加えたものであり、クーロン摩擦補償電流icとしてステップ関数の補償量icsを用いる。位置決め制御の応答中のデータに基づき摩擦補償量を適応的に変化させることができるので、周囲温度が変化して波動歯車減速機1の摩擦特性が変動しても、モータ軸6を大きな振動を伴うことなく目標角度に整定可能である。
(もっと読む)
制御方法及び制御装置
【課題】移動体を高精度に位置決め制御することができる制御装置などを提供する。
【解決手段】制御装置1は、与えられた目標移動位置及び移動速度を基に指令移動位置を生成し、生成した指令移動位置を基に送り装置50の駆動モータ73を制御する制御信号生成部12と、学習制御部16と、移動体52を往復動させたときに生じる送り装置50の転動体に起因した摩擦力又はこれと等価な力で定義される外力と移動体52の移動位置との相対データを基に、移動体52を目標移動位置に移動させた際に生じると推定される外力と移動体52の移動位置との相対データを推定するデータ推定部22、推定された相対データを基に推定外力を算出して各指令移動位置における移動誤差量を推定する誤差推定部23、及び推定された移動誤差量を基に補正量を算出して学習制御の初期値として設定する補正量設定部24から構成される初期値設定部21とを備える。
(もっと読む)
工作機械の送り駆動系の制御方法及び制御装置
【課題】象限突起の補正量を運転状況に応じて適正に定めるとともに、補正のタイミングや補正形状のズレを極小にし、象限突起の補償を十分に行う。
【解決手段】送り駆動系の制御方法は、サーボモータにより送り運動される移動体の位置検出信号と位置指令信号とが一致するように速度指令信号を生成し、サーボモータの速度検出信号と速度指令信号とが一致するように駆動力信号を生成し、この駆動力信号に基づいてサーボモータの駆動力を制御する。位置指令信号を先読みし、位置及び送り速度から送り駆動系に作用する摩擦力を推定する摩擦力推定工程21と、位置指令信号の入力から実際に移動体位置が駆動されるまでの制御系をモデル化し、このモデルの摩擦力と位置指令との関係から、上記摩擦力推定工程で推定した摩擦力に相当する補正指令を算出し、この補正指令を位置指令に加算して摩擦力の補償を行う摩擦力補償工程22とを備える。
(もっと読む)
サーボ制御装置
【課題】送り機構のボールスクリューが経年変化や温度変化で伸縮してボールスクリューの軸方向に沿う剛性が変化しても、このような剛性変化を補償して、テーブルの位置を正確にサーボ制御する
【解決手段】制御部100は、サーボモータ40をフィードバック制御して、負荷であるテーブル02をサーボ制御する。逆特性モデル300は、機械系の動的誤差を補償する速度補償信号V300を求めて、フィードフォワード補償制御をする。剛性変化補償部400は、ボールスクリュー30のネジ部31の軸方向に沿う剛性が変化したら、この剛性変化に応じて、逆特性モデル300の補償制御用伝達関数に含まれているネジ部の軸方向に沿う剛性値を変化させる。
(もっと読む)
位置決め制御装置
【課題】減速機構軸の減速後軸の回転角度を検出する必要がある場合、角度検出器の選定は減速機構の構造、被回転体により左右される。その結果角度検出器の大型化、重量化により位置決め装置全体が高額となる。
【解決手段】減速機構2の減速前軸4の角度より減速後軸3の角度を推定計算するようにすることで、減速機構2、被回転体の構造に左右されずに角度検出器7を選定できるようになり、位置決め装置全体の軽量化、低価格化を実現することができる。
(もっと読む)
1 - 20 / 80
[ Back to top ]