
株式会社IHIにより出願された特許
2,011 - 2,020 / 5,014
アンバランス計測方法と装置
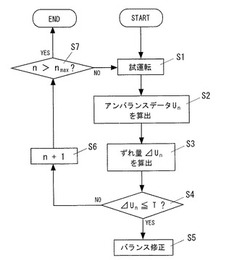
【課題】軸受と潤滑油との温度差に影響されず、かつ、回転機械の個体毎にアンバランスデータがばらつくことなく、高精度なアンバランスデータを取得する。
【解決手段】回転体を回転駆動させる試運転を複数回行い(ステップS1)、各試運転毎に、データ取得ステップS2、ずれ量算出ステップS3、および判断ステップS4を行う。データ取得ステップS2では、支持体の振動と回転体の回転角を検出し、かつ、振動と回転角から前記回転体のアンバランスデータを算出する。ずれ量算出ステップS3では、試運転のアンバランスデータが、この試運転の直前に行った試運転のアンバランスデータからずれている量を表したずれ量を算出する。判断ステップS4では、ずれ量がしきい値以下であるかを判断する。ずれ量がしきい値以下になるまで、ステップS1〜S4を繰り返す。
(もっと読む)
ロータアセンブリ、過給機、及びロータアセンブリの製造方法

【課題】ロータアセンブリ29の製造に要する時間を短くして、ロータアセンブリ29の生産性(製造性)及びロータアセンブリ29の製造の作業性を向上させる
【解決手段】タービンインペラ27は、金属粉末射出成形によって成形された成形体27Fを焼結してなるものであって、タービンホイール55の背面中心部にロータ軸9の左端部と嵌合可能な円形の嵌合穴59が形成され、タービンホイール55とロータ軸9は、成形体27Fにおける嵌合穴に相当する部位59Fにロータ軸9を挿入させた状態で、成形体27Fの焼結時の熱収縮によって接合されるようになっている。
(もっと読む)
回転翼の非接触翼振動計測方法
【課題】少ない非接触センサで同等の情報を得ることができ、かつセンサピッチを小さくでき、これにより小径ターボ機械の計測に適用できる回転翼の非接触翼振動計測方法を提供する。
【解決手段】ケーシング2に取り付けられた非接触センサ12で回転翼1を非接触で検出し、非接触センサによる回転翼の検出信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻から回転翼の振動を計測し、回転翼の振動時と非振動時の通過時刻のずれと立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する。
(もっと読む)
貯留タンクの製造方法
【課題】水張り試験を外槽の完成を待たずに行うことを可能とすることによって工期の短縮を図る。
【解決手段】内槽に試験用液体を貯留することによって搬入出口が残存する外槽に作用する応力をシミュレーションにより算出すると共に応力が許容値であるかを判定し、応力が許容値である場合には搬入出口を閉鎖する前に水張り試験を行う。
(もっと読む)
レーザ照準装置
【課題】移動体に搭載して遠隔操作される小火器に装着するレーザ照準装置であって、装置構造が簡単であると共に、操作者の熟練度に関係なく正確な射撃を行うことができるレーザ照準装置を提供する。
【解決手段】移動体Vに搭載した小火器Wに装着するレーザ照準装置であって、目標Tに向けてレーザ光を照射するレーザ発振器1と、目標Tを撮像する固定焦点カメラ2と、画像3Aを表示する表示部3と、画像3A上に目標マーカMを表示するための制御部4を備え、制御部4が、レーザ照準点Aを特定する照準点特定手段41と、レーザ発振器1からレーザ照準点Aまでの目標間距離R1を検出する距離検出手段42と、レーザ照準点Aの位置及び目標間距離R1に基づいて目標マーカMの表示位置を決定する表示位置決定手段43を備えた構成とすることで、装置構造が簡単であると共に、操作者の熟練度に関係なく正確な射撃を行えるようにした。
(もっと読む)
ガス化装置
【課題】触媒粒子の消費量を格段に低減可能なガス化装置を提供する。
【解決手段】本発明のガス化装置1は、流動媒体粒子P2、流動媒体粒子P2から供給される熱により有機ガスG2とチャーP3とに熱分解する有機物原料P1及び有機物原料P1の熱分解を促進する触媒粒子が貯留されるガス化炉10と、ガス化炉10内に貯留される粒子を流動化して、これら粒子のうちの触媒粒子をガス化炉10内に滞留させるとともにチャーP3及び流動媒体粒子P2の一部をガス化炉10に設けられた排出口から排出する流動化装置11と、を備えている。
(もっと読む)
軸受装置
【課題】回転シャフトを3つ以上の軸受で支持する軸受装置において、運転域固有振動数による振動モードの節が軸受の位置にある場合でも、回転シャフトの支持剛性が変化し、回転機械の振動特性が急激に変わることを防止する。
【解決手段】回転機械の回転シャフトの半径方向荷重を3つ以上の軸受5a,5b,5cで支持する軸受装置10であって、回転機械の運転回転数範囲内にある回転シャフト3の固有振動数を運転域固有振動数とし、運転域固有振動数による振動モードの節または該節付近にある軸受5bを、負隙間軸受として構成する。負隙間軸受は、回転シャフト3から回転機械の静止側部材7へ常に力を伝達するように構成されている。
(もっと読む)
アライメントステージ
【課題】 移動荷重を受けるワークの高精度な位置補正を行う。
【解決手段】 ベース1の上方に、移動荷重が作用するワークを保持するトップテーブル4aを配置し、ベース1とトップテーブル4aとの間にて、荷重移動方向Lに千鳥配置となるトップテーブル4aの中央と四角部に対応する個所に、X、Y、θの3自由度を備えた支持ユニット13と、支持ユニット13と同様の構成に加えて一軸方向のボールねじ直動機構9を有する駆動ユニット14A,14B,14C,14Dを介装する。一方と他方の対角位置の駆動ユニット14A,14Bと14C,14Dは、ボールねじ直動機構9を直交配置させる。ワークを介してトップテーブル4aに荷重移動方向Lに移動しながら作用する移動荷重を、各駆動ユニット14A,14C、支持ユニット13、各駆動ユニット14B,14Dで連続的に受けることで、トップテーブル4aの変形を抑制させる。
(もっと読む)
ピストン、レシプロエンジン
【課題】ピストンリングに対してむらなく潤滑油を供給することができ、ピストンリング背面へ潤滑油の蓄積を効率良く行うことができるピストン及びレシプロエンジンを提供する。
【解決手段】ピストン20には、ピストンリング22が装着されるピストンリング溝よりも先端側の外周面に潤滑油を円周方向に拡散する誘導溝23が形成される。誘導溝23は、先端側から後端側に向けて傾斜するように形成され、先端頂部Aが潤滑油の供給箇所12に対応する位置に形成される。
(もっと読む)
自律走行ロボット、自律走行ロボットを用いた追走システム、及び追走方法
【課題】本発明は、被追走体を見失う事象が曲がり角以外の環境において生じる場合であっても、被追走体への追走を継続して行うことができるようにする。
【解決手段】本発明は、被追走体検出部37により、被追走体を見失ったか否かを判定する見失判定手段34aと、見失ったと判定したときには、見失った後の被追走体位置を推定する被追走体位置推定手段70bと、被追走体を見失う前の被追走体位置、被追走体を見失った後の被追走体推定位置及び遮視物の位置の相対的な位置関係に基づいて、その被追走体が遮視物に遮られたか否かを判定する遮視判定手段70aと、被追走体が遮視物に遮られたと判定したときには、その被追走体の被追走体推定位置を目標とした走行経路を生成する走行経路生成手段100aと、生成した上記走行経路に沿い、走行機構により移動させる走行手段110aとを有している。
(もっと読む)
2,011 - 2,020 / 5,014
[ Back to top ]