
株式会社ダイヘンにより出願された特許
191 - 200 / 990
信号検出装置
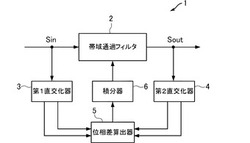
【課題】PLLを用いることなく、周波数が未知若しくは周波数が時間的に変化する入力信号の周波数を検出する。
【解決手段】信号検出装置1は、係数a1が可変の帯域通過フィルタ2とその係数a1を制御するための第1,第2直交化器3,4、位相差算出器5及び積分器6からなる制御ブロックを含む。第1,第2直交化器3,4及び位相差算出器5で入力データx[k]と出力データy[k]の位相差ψを示す情報e[k]=M・sin(ψ)を算出する。e[k]の符号を反転して積分器6で所定の積分演算を行い、その積分演算値を帯域通過フィルタ2の係数a1に設定する。入力データx[k]が入力される毎に、e[k]>0であれば減少させ、e[k]<0であれば増大させるように係数a1を変化させて帯域通過フィルタ2の中心周波数を入力信号の周波数に収束させる。これにより帯域通過フィルタ2の出力信号の周波数を入力信号に一致させる。
(もっと読む)
アーク溶接ロボット制御装置

【課題】
基準面を設定して狙い角等のトーチ姿勢を数値で教示あるいは表示するアーク溶接ロボット制御装置では、溶接線を規定する教示点の位置を修正したときに、基準面を算出するための補助点も修正する必要がある。
【解決手段】
ロボット制御装置RCは、溶接線を規定する各教示点と、基準面を算出するための補助点とを、対にして記憶する記憶部を備える。ロボット制御装置RCは、溶接線上の教示点の位置変更があったとき、位置変更があった教示点と対の関係にある補助点を、前記位置変更があった教示点の修正分を補正して自動算出するCPUを備える。本来の溶接線の教示修正結果に応じて基準面を算出するための補助点も自動修正されるので、教示修正時間を大幅に短縮できる。
(もっと読む)
アークスタート良否判定方法
【課題】 アークスタートにおける不良発生の傾向を適切に把握することが可能なアークスタート良否判定方法を提供すること。
【解決手段】 消耗電極ガスシールドアーク溶接におけるアークスタート良否判定方法であって、複数回の溶接において、それぞれのアークスタートにおける良否判定、および不良であった場合の不良の種類判定の結果に基づき、良好なスタートの回数、不良であった場合の各種類の回数を自動的に累積させる。このような構成により、ある溶接条件を設定すると、たとえばティーチペンダントTPの表示によって、その溶接条件においてどのような種類の不良がどのような比率で発生しているかを定量的に把握することが可能である。
(もっと読む)
溶接用電源装置
【課題】制御に用いるべく算出する出力電力の誤差を小さくし、溶接性能の更なる向上に寄与することができる溶接用電源装置を提供する。
【解決手段】溶接トランス23に補助巻線23cが設置され、制御装置31は、出力電圧値と相関のある補助巻線23cの両端電圧値の検出を行う。制御装置31は、補助巻線23cの両端電圧値に基づいて取得した出力電圧値と、電流センサ33側で取得した出力電流値とで出力電力値を算出し、PWM制御のデューティ比に反映させる。つまり、出力電圧値の取得に補助巻線23cを用いることで電源装置11内の主電力線と制御装置31とを絶縁できるため、遅れの要因となっていたアイソレーションアンプ等の絶縁素子を介しての出力電圧値の取得を行わなくて済み、処理部32での出力電流値と出力電圧値との取得の時間差は極めて小さくなる。
(もっと読む)
溶接用電源装置
【課題】制御に用いる電極先端電圧を適切に検出し、溶接性能の更なる向上に寄与することができる溶接用電源装置を提供する。
【解決手段】測定モードにおいて、電源装置の出力側の合計抵抗値は、インバータ回路の動作にて生じる出力電流Iを電流値Ip1とした時の出力電圧の電圧値に基づいて算出される。合計インダクタンス値は、出力電流Iを直流リアクトルの通常特性領域A1と過飽和特性領域A2とに対応する2つの電流値Ip1,Ip2とした時の各インダクタンス値La1,Lb1が検出され、この2つのインダクタンス値La1,Lb1の直線補完にて関数L(I)として算出される。制御装置は、溶接動作時において、検出する出力電圧の電圧値に対して合計抵抗値及び合計インダクタンス値にかかる電圧変化分の補正を行い、先端電圧の算出を行う。
(もっと読む)
電磁誘導加熱調理器
【課題】電力設定が容易でかつ現在の電力設定内容を即座に把握することができて使い勝手の良い電磁誘導加熱調理器を提供する。
【解決手段】電力設定手段2により加熱手段1の加熱電力が複数段階に設定される場合に対応して、各段階の設定電力を一つおきに間引きした残りの段階の設定電力の数に相当する個数の点灯表示部PL3〜PL8を設け、制御手段5によって、設定電力の大きさが、間引き後の残りの設定電力に該当する場合にはこの設定電力に該当する点灯表示部を含めそれよりも小さい側に位置する各点灯表示部を全て常時点灯状態にする一方、間引きされた中間段階の設定電力に該当する場合には、この設定電力よりも小さい側に位置する各点灯表示部を全て常時点灯状態に、この設定電力よりも一つ大きい側に位置する点灯表示部を点滅状態になるようにする。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
アーク溶接方法
【課題】 安定した溶接を行うことができるアーク溶接方法を提供すること。
【解決手段】 消耗電極15のうち溶接トーチに囲まれた部位の、上記溶接トーチから母材Wへ向かう速度V2(t)が正の値である前進送給期間Tw1と、速度V2(t)が負の値である後退送給期間Tw2と、からなる単位期間Twを繰り返すアーク溶接方法であって、速度V2(t)を一周期が単位期間Twである周期関数として、消耗電極15を送給する工程と、各前進送給期間Tw1において、消耗電極15を母材Wに短絡させる工程と、各後退送給期間Tw2において、消耗電極15と母材Wとの短絡を開放する工程と、を備える。このような構成によれば、安定した溶接を行うことができる。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
ティグ溶接トーチ
【課題】電極25のノズルの先端部28aからの突き出し長さを容易に調整することができるティグ溶接トーチ31を提供する。
【解決手段】ティグ溶接トーチ31において、電極固定用キャップ32をトーチボディの基端部23bにねじ込むことによって、コレットの先端部24aをコレットボディの先端部26aの内面に押し当てる。電極固定用キャップ32に電極25が挿通する挿通孔32dが形成されている。電極突出し長さ調整用キャップ33の先端部から電極の基端部25bが挿入される電極挿入孔33dが形成され、この電極挿入孔の底部33eが電極固定用キャップの基端部32bから突き出た電極の基端部25bに当接する。電極突出し長さ調整用キャップ33を電極固定用キャップの基端部32bにねじ込むことによって、電極挿入孔の底部33eが電極の基端部25bを押圧する。
(もっと読む)
191 - 200 / 990
[ Back to top ]