
日本無線株式会社により出願された特許
1,011 - 1,020 / 1,186
導波管スロットアレイアンテナ
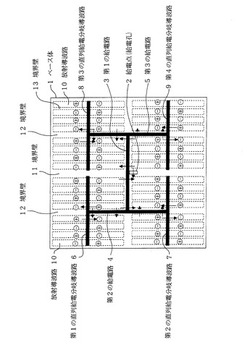
【課題】 同じ大きさならば従来より4倍近い周波数帯域が得られる導波管スロットアレイアンテナを提供すること。
【解決手段】 角型開口面を田の字形に4分割し、分割部分それぞれに直列給電分岐導波路6、7、8、9とそれらから上方及び下方へ延びる放射導波路10を設け、各直列給電分岐導波路6、7、8、9への給電は、開口面の央部に、E面が開口面と同じ向きになるようにしてH字形に張り回した給電路(第1の給電路3、第2の給電路4、第3の給電路5)を設け、アンテナ背後から第1の給電路3の中央部広壁面へ給電し、第2の給電路4と第3の給電路5の両端部を各分割部分の直列給電分岐導波路の広壁面へ結合する。
(もっと読む)
振幅位相制御装置および受信システム

【課題】振幅または位相に変調が施された信号に含まれる振幅位相誤差を低減するための装置を提供する。
【解決手段】多段型振幅位相制御部18は、第1単位振幅位相制御部18aと第2単位振幅位相制御部18bを含んで構成される。乗算部26aは、入力された複素I/Q信号にウェイト係数算出部28aが算出したウェイト係数W1を乗じて出力する。乗算部26bは、第1単位振幅位相制御部18aから入力された複素I/Q信号に、ウェイト係数算出部28bが算出したウェイト係数W2を乗じて出力する。硬判定部38は、第2単位振幅位相制御部18bの出力信号Y2に対して硬判定を施した硬判定信号Zを出力する。ウェイト係数算出部28a,28bは、硬判定部38が出力する硬判定信号Zに基づいて適応化アルゴリズムを実行し、それぞれウェイト係数W1 ,W2を算出する。
(もっと読む)
中継放送装置
【課題】送信アンテナの接続を現用送受信機から予備送受信機へ切り換えた場合においても、回り込み信号の発生がなく、送信波を低減する必要のない中継放送装置を提供する。
【解決手段】振幅位相比較部48は、可変位相器46aから出力された信号と、可変位相器46bから出力された信号とに基づいて振幅差異信号と遅延時間差異信号を生成し、伝送特性制御部49に入力する。伝送特性制御部49は、振幅差異信号に基づいて可変減衰器47aおよび47bを制御し、遅延時間差異信号に基づいて可変位相器46aおよび46bを制御する。伝送特性制御部49の制御により、可変位相器46aが出力する信号と可変位相器46bが出力する信号を同振幅同位相とすることで、送受信機切り換えスイッチ98が切り換えられたときの回り込み波の発生を抑制することができる。
(もっと読む)
FETバイアス回路
【課題】FET増幅回路の増幅用FETに、個別に調整することのないバイアス電圧を印加することができるFETバイアス回路を実現する。
【解決手段】FETバイアス回路に、ゲートが増幅用FETのゲートとソースが増幅用FETのソースとに各々接続され、バイアス電圧に対するドレイン電流が増幅用FETのドレイン電流に略比例するモニタ用FETと、モニタ用FETに流れるドレイン電流が所定の動作クラスになるようバイアス電圧をモニタ用FETに印加することにより、増幅用FETが所定の動作クラスになるバイアス電圧を印加する定バイアス回路と、を備える。
(もっと読む)
測位装置
【課題】従来技術では、移動に伴うユーザ位置の変化を滑らかにするだけであり、測位結果の精度向上にはならないという問題があった。
【解決手段】車両に搭載されたGPS測位装置10の測位計算部16は、複数のGPS衛星12からの擬似距離によって求められた位置ベクトルP(t)と、ドップラー周波数から算出された移動速度の速度ベクトルV(t)を測位信頼度算出部22に出力する。次に、測位信頼度算出部22は、信頼度S(t)を求め、時定数算出部24に出力する。時定数算出部24は時定数T(t)を補正位置算出部26に出力する。さらに、補正位置算出部26は、位置ベクトルP(t)と時定数T(t)を取得して補正されたユーザ位置P’(t)を出力する。
(もっと読む)
現用予備切替装置及びそれを備えた現用予備切替型送信機
【課題】現用回路と予備回路の双方から出力される信号の位相同期制御に用いる制御回路を小規模で簡略化するとともに位相同期制御の応答性を向上させる。
【解決手段】位相比較器42は、現用送信回路10と予備送信回路12の双方から抽出した送信信号の位相を、各送信信号の抽出箇所での位相差Δθが維持された状態で比較する。位相比較器44は、現用送信回路10と予備送信回路12の双方から抽出した送信信号の位相を、各送信信号の抽出箇所での位相差Δθからπ/2[rad]変化させた状態で比較する。信号処理部46は、位相比較器42からの検波電圧V1の極性に基づいて位相切替器30における移相量(0またはπ[rad])の切り替え制御を行うとともに、位相比較器44からの検波電圧V2が0[V]になるように可変移相器32における移相量の制御を行う。
(もっと読む)
測位装置及び測位方法
【課題】受信点の移動速度と、測位手段による測位位置の変化から求めた移動距離と、を加重平均することにより位置跳びを防止できるが、余分な遅れ時間が発生する。
【解決手段】GPS測位装置10は、複数の測距部14と測位計算部21を有し、測距部14は、GPS衛星との距離を計算するメインパートと、メインパートに補助となるデータを提供するサブパートを有している。メインパートは、GPS衛星識別部42、追尾中断検知部46、航法データ復調部48、軌道メモリ52、衛星位置計算部54、コード擬似距離計算部56、オフセット推定部58及び補正擬似距離計算部70を有し、サブパートは、衛星送信時刻計算部50、キャリア積算部62、キャリア積算リセット部68、キャリア積算メモリ64、キャリア推定部60、移動速度通知器22及び測距制御部44を有している。
(もっと読む)
中央給電導波管スロットアレイアンテナ
【課題】 スロット板とベース体放射導波路間境界壁との導通がとれていなくともよい導波管スロットアレイアンテナの提供。
【解決手段】 給電導波管11の広壁面(H面)から複数平行に延びる放射導波管10に対しE面からH面に十字状に給電する給電導波管11の長手方向中央部両側に配置される放射導波管10の間の境界壁を、他の部分の境界壁の幅よりも大きくとって、この部分の給電導波管11のどちらか一方の広壁面(H面)部分から境界壁幅内の幅で境界壁長手方向に所定寸法の角型溝を切り、その角型溝の底部からベース体背面側へ貫通する給電導波構造12を設け、これより給電する。これにより給電導波管11への給電は左右逆相となり、スロット板と境界壁の間に電流が流れなくなる。
(もっと読む)
GPS受信機
【課題】GPS受信機における同期捕捉と同期追従は、拡散符号及び搬送波の同期に時間を要する外乱が発生した場合において、同期保持の部分で遅れが発生する。
【解決手段】GPS受信機10は、衛星信号を受信するIF変換器101と、同期追従ユニット20と、受信制御部110と、擬似速度測定器114と、擬似距離測定器116と、ドップラー周波数測定器118と、位置・速度演算部120及び温度変化検出器112と、を有する。さらに同期追従ユニット20は、測位演算に必要な衛星の個数分用意され、スペクトラム逆拡散コードを出力する比較信号発生器102と、周波数誤差測定器103と、相関を検出する相関検出器107と、受信信号に応じて追従モードを切替える動作モード切替判定器106と、切替スイッチ108と、通常追従用ループフィルタ104と、弱信号追従用ループフィルタ105と、を有する。
(もっと読む)
高周波増幅回路
【課題】増幅後の信号同士を合成して出力する際に、出力信号に発生する歪みを安定して低減することができる高周波増幅回路を提供する。
【解決手段】エラー信号抽出回路56は、カプラ52により取り出された出力高周波信号Sout(t)に、カプラ54により取り出された入力信号Sin(t)を結合することで、出力高周波信号Sout(t)中に残留しているエラー信号成分e(t)を抽出する。同期検波器58は、信号分離器12から取り出されたエラー信号e(t)を参照信号として用いて、エラー信号抽出回路56による結合後の出力高周波信号Sout(t)を同相及び直交位相で同期検波する。そして、同相及び直交位相で同期検波することで発生した検出電圧に基づき、振幅調整器40の利得及び位相調整器42の移相量がそれぞれ制御される。
(もっと読む)
1,011 - 1,020 / 1,186
[ Back to top ]