
Fターム[2B043DB21]の内容
農業機械一般(操向) (6,001) | 操舵装置の構成、配置又は取付け (462) | 電動機器又は電気回路 (31)
Fターム[2B043DB21]に分類される特許
21 - 31 / 31
操向装置
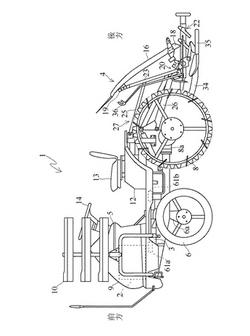
【課題】従来、例えば田植機においては、大容量の電磁クラッチを必要とし、更に、ハンドルシャフト、電磁クラッチ、自動操向用のアクチュエータ等の従来のステアリング系統の構成においては、必ず連続的に上下方向に接続する必要があるため、設計上の自由度が少なかった。
【解決手段】ハンドルシャフト41及びパワーステアリングユニット51が設けられる位置とは異なる位置に、ステアリングギアボックス81を回動させるための油圧モータ71を制御する電磁バルブユニット61を設けた。
(もっと読む)
圃場走行作業用農作業車

【課題】圃場の往復作業走行の折返し部に来た際に、作業部の取扱いを要することなく機体を旋回することができるとともに、その旋回過程においてハンドル戻し等の再度の旋回操作をした場合であっても、作業部の上昇動作を招くことなく一連の動作を継続することができる圃場走行作業用農作業車を提供する。
【解決手段】圃場走行作業用農作業車は、圃場を旋回走行しうる機体と、作業位置まで下降して圃場走行作業をする作業部7と、その制御部21とを備えて構成され、上記制御部21は、機体走行中の旋回操作の検出に応じて作業部7の停止から、非作業位置への上昇、作業位置への下降、稼動までの一連の動作を制御する旋回連動制御を行うとともに、この旋回連動制御における作業部7の稼動動作に到る前の作業位置への下降動作から所定の旋回走行範囲について、作業部7を作業位置に維持するように制御する。
(もっと読む)
三輪型管理機
【課題】 運転者の負担を大幅に軽減することができる三輪型管理機を提供することを課題とする。
【解決手段】 前輪が2輪で、後輪が1輪で、この後輪を操舵輪とし、農作業に供する三輪型管理機において、図で、横軸は後輪の操舵角θ、縦軸は(前輪速度/後輪速度)を示す。すなわち、後輪の操舵角に基づいて前輪の回転速度を制御する。
【効果】 操舵角が大きくなるほど、走行速度が遅くなり、転倒の危険を回避することができる。運転者は旋回前に減速操作をする必要がないので、運転操作が楽になり、運転者の負担を大幅に軽減することができる。
(もっと読む)
操向制御方法及び装置
【課題】
視界に入っている一行程前に移植された苗一列全てに対してただ一つの直線を定め、これに対して平行に移植機を走行させる。
【解決手段】
移植機に設けた撮像手段によって既植の苗列を撮像して苗列の画像情報を取得するステップと、該画像情報から苗列領域が抽出された2値画像を取得するステップと、該2値画像を逆透視変換して2値化された苗列領域の仮想地平面画像を取得するステップと、該仮想地平面画像において該苗列領域を直線で近似するステップと、該直線に対する移植機の位置情報に基づいて操向制御を行うステップとを有する。
(もっと読む)
作業車の旋回制御装置
【課題】 直進状態から左旋回状態や右旋回状態に切換えるときの操作性の低下を回避することができる作業車の旋回制御装置を提供する。
【解決手段】 直進用無断変速装置(7)と旋回用無断変速装置(8)を設け、直進時は両無断変速装置出力が同速度になるよう速度検出手段(58、59)の検出速度に基づき両無断変速装置を変速制御する。旋回時は外側走行装置に直進用、内側走行装置に旋回用の無断変速装置出力を各々伝え速度差を持たせる。その際の旋回用無断変速装置(8)の変速操作速度を、速度指令手段(14)に基づく直進用無断変速装置(7)の変速操作速度よりも大きくする。
(もっと読む)
コンバインの操向制御装置
【課題】操向操作具を操作してサイドクラッチを切断する際に、比例制御弁の応答遅れによりサイドクラッチが切断しないという課題があった。即ち、比例制御弁は出力が無い(0)状態から、小幅な信号を出力する際の応答速度に課題があり、条合わせなどの方向微調整操作や方向自動制御時に、サイドクラッチが切断しないことが稀にあった。
【解決手段】操向操作具(12)の不感帯を超える操向操作で、一方の比例制御弁(48L,48R)を操作して対応するサイドクラッチ(35L,35R)を切断するように、操向操作具(12)と比例制御弁(48L,48R)とを制御部(54)を介して連繋してあるコンバインの操向制御装置であって、操向操作具(12)が不感帯内にある時に、左右一対のサイドクラッチ(35L,35R)が切断することの無い低バイアス電流を、制御部(54)から一対の比例制御弁(48L,48R)に出力する。
(もっと読む)
コンバイン
【課題】走行機体の無段階変速を円滑に行い、操作性を向上させる。
【解決手段】エンジンからの動力を、前進・後退の出力に切り換え可能な走行用油圧式動力伝達機構から左右一対の遊星歯車機構を介して左右一対の走行クローラの駆動輪へ伝達するように構成する一方、操向用の丸ハンドル47の左右旋回のための操作量に応じて出力調節可能な旋回用油圧式駆動手段を介して旋回に必要な差動トルクを左右一対の遊星歯車機構に付与する。走行速度は変速用ペダル101の踏込みと、オートクルーズセットスイッチ129のONで決定きるように構成する一方、オートクルーズ解除スイッチ130のON状態では変速用ペダル101の踏込み量に比例して、走行速度を増速・減速させることができるように制御装置103が制御する。
(もっと読む)
コンバインのトランスミッション
【課題】湿田での作業走行時に湿田モードとすることにより、走行機体の旋回を乾田作業時と概ね同じ状態で行わせることにより、乾田作業及び湿田作業の何れにおいても走行機体の操縦をスムーズに行うと共に、乾田旋回モードと湿田旋回モードの切り換えを自動的に行うことができるコンバインのトランスミッションを提供する。
【解決手段】旋回クラッチ(43L),(43R)の接続圧力を変更することにより、乾田作業時の乾田旋回モードと湿田作業時の湿田旋回モードとを切り換え可能に構成すると共に、走行機体(1)の設定速度(S)と実質速度(K)との差異を走行時の滑り率として判断する速度差異判断手段を設け、該速度差異判断手段が所定値以上の滑り率と判断した時に、乾田旋回モードと湿田旋回モードとを自動的に切り換える乾湿切換制御手段を設けた。
(もっと読む)
作業機の走行用伝動構造
【課題】 直進性および旋回性に優れるとともに、電気系の故障発生時でも容易に自力移動することができる作業機の操向用電動構造を得る。
【解決手段】 エンジン15に連動連結した無段変速装置からなる主変速装置16によって左右のクローラ走行装置1を同方向に同速度で無段階に変速するとともに、エンジン15に連動連結した無段変速装置からなる旋回用変速装置34で左右のクローラ走行装置1に速度差を与えるよう構成し、主変速装置16を機械的に主変速レバー19に連係するとともに、旋回用変速装置34をステアリング操作具の操作に基づいて電気的に変速制御するよう構成し、電気制御系への通電が遮断された状態では旋回用変速装置34が中立停止状態に機械的に付勢復帰されるよう構成してある。
(もっと読む)
農作業車用旋回制御装置
【課題】土壌が軟弱な圃場を含む幅広い湿田条件において、旋回内側のクローラのロック状態を回避して安定した旋回動作が可能となる農作業車用旋回制御装置を提供する。
【解決手段】農作業車用旋回制御装置は、旋回操作具の操作量に応じて初期作動圧P0wからブレーキ位置作動圧の範囲で一様に変化する旋回操作特性によって減速用作動圧を制御する制御部からなり、上記旋回操作特性は、標準モードおよび湿田モードの選択と対応して切替可能に、かつ、それぞれのブレーキ位置作動圧を調整可能に構成され、上記湿田モード用の旋回操作特性は、ブレーキ位置作動圧が所定のブレーキ位置基準圧力Pbs未満の場合にこのブレーキ位置基準圧力Pbsからの差分を旋回操作具の全操作範囲で減速用作動圧から一律に差し引いた旋回操作特性により旋回制御する。
(もっと読む)
農作業車の作業機昇降制御装置
【課題】従来、トラクタで異形の圃場を作業する場合、ハンドルの操作パターンは様々で、ハンドル操作に連動させて作業機を自動上昇及び下降させる作業機昇降制御装置を作動させると、畦際移動時等に自動降下が作動し、作業性の悪化を招いたり、可動部を障害物に接触させて損傷するなどの問題があった。
【解決手段】トラクタに、車体に対し昇降可能に装着した作業機Rを昇降駆動する油圧昇降シリンダ10と、車体の旋回操作を検出するハンドル切角センサ22を備える。また、旋回モード設定器23を備え、前記旋回操作に連動して作業機Rを非作業位置へ上昇させ旋回終了時に作業機Rを上昇位置のまま保持する第一モード(オートリフトアップ)と、前記旋回操作に連動して作業機Rを上昇させ且つ旋回終了時に下降させる第二モード(フルオートリフト)を選択する構成とした。
(もっと読む)
21 - 31 / 31
[ Back to top ]