
Fターム[2B043EA22]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 作物の状態 (37) | 作物と車両又は作業機との相対位置 (10)
Fターム[2B043EA22]に分類される特許
1 - 10 / 10
田植機
【課題】圃場の環境に左右されることなく、進行方向と苗の並び方向とを確実に整合させることができる田植機を提供する。
【解決手段】左フロントカメラ及び右フロントカメラ21にて圃場に植え付けられた苗を撮像し、撮像された苗を表示部8に表示する。操作者は、表示部8に表示された苗の並び方向を確認して田植機を操舵し、表示部8に表示された線を最も端に位置する苗の列に一致させて、進行方向と苗の並び方向とを整合させることができる構成とした。
(もっと読む)
茶園管理機

【目的】 本発明は、茶畝を跨いで走行し、該走行方向を自動操舵することができ、特に、感知機構を固定状として、後進も良好にできるとともに、簡易な構成にできること。
【構成】 茶畝90を跨いだ前側門型フレーム2A及び後側門型フレーム2Bの左右下端に走行装置1,1を備え、茶畝に沿って作業を行う茶園管理機におけること。前側門型フレーム2Aの対向する内側に、平面的に見て左右茶畝側面91,91に接触しつつ中央箇所が茶畝90側に膨出する弧状感知板5と、この内部に設けられた圧力センサとを有する前進用茶樹感知手段Aが備えられていること。左右の弧状感知板5,5に加わる茶畝側面91,91からの接触圧力を測定して、左右それぞれの接触圧力が均等となるよう自動走行制御部Cにて制御して茶畝90に沿って前進自動走行するようにしてなること。
(もっと読む)
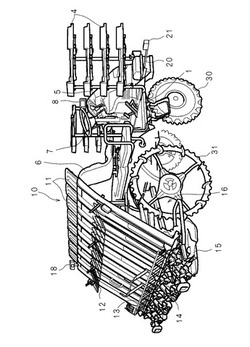
自動車を操縦するための方法および配置
走行方向で自動車(1)前方にある地面から画像情報が把握され、これらの画像情報から走行方向および/または走行速度を変化させるための操縦命令が作り出される自動車を操縦するための方法を用いて、農業用自動車の画像情報に基づき、目立つ対象構造(3)が選択され、繰り返し自動車(1)と目立つ対象構造(3)との間の距離(a)が求められ、操縦命令が、対象構造に対応する画像情報から、および自動車と対象構造との間の距離変化から、作り出される自動車を操縦する方法。 (もっと読む)
作業車両
【課題】操向ハンドル10の回動操作に応じて走行機体を左又は右に旋回させる構成の作業車両において、走行機体の進行方向を修正する際に、操向ハンドル10を細かく切り足したり切り戻したりする手間をなくす。
【解決手段】操向ハンドル10のハンドルホイル部94に、走行機体の進行方向を微調節操作するためのステアリングスイッチ100を備える。ステアリングスイッチ100における左右方向の操作は、操向ハンドル10の回動操作に拘らず、常に許容される構成にする。すなわち、ステアリングスイッチ100と操向ハンドル10とは互いに独立的に操作し得るように構成する。そして、操向ハンドル10の単位操作量に対する走行機体1の旋回動作量は、ステアリングスイッチ100の単位操作量に対する走行機体1の旋回動作量と比べて格段に大きく設定する。
(もっと読む)
コンバイン
【課題】刈始めに際し、方向自動制御による操向クラッチ出力が手動操作による操向クラッチ出力に重なることを回避し、出力の重複によってオペレータの操作フィーリングが低下するという問題を解消する。
【解決手段】刈取穀稈を分草するデバイダ8と、刈取穀稈に対するデバイダ8の位置を検出する方向センサ18と、方向センサ18の検出信号に応じて機体の走行方向を自動的に制御する方向自動制御部21とを備えるコンバイン1において、方向センサ18の位置よりも下流の穀稈搬送経路で搬送穀稈を検出する搬送穀稈検出センサ(扱深メインセンサ17)を備え、該搬送穀稈検出センサのONを方向自動制御の開始条件とする。
(もっと読む)
作物列検知装置、作物列追従装置および農業用作業機
【課題】 根菜類収穫機や除草機等の農業用作業機に対する作物列の位置ズレを高精度に検知できることはもとより、畝および作物列に対する追従性を向上させて接触アームに対する農業用作業機の振動やブレの影響を抑制することができ、なおかつ、農業用作業機の後退時に接触アームが畝に突き刺さって破損するのを防止することができる作物列検知装置、作物列追従装置および農業用作業機を提供する。
【解決手段】 作業機3に対し上下平行リンク機構41によって上下動自在に支持される上下動支持部材4と、この上下動支持部材4の下端部に揺動自在に軸支される揺動フレーム5と、固定ブラケット61、回動垂下ブラケット62および揺動ブラケット63から構成される左右平行リンク6と、各回動垂下ブラケットの下端部に固定される一対の接触アーム7,7と、これら接触アーム7,7の左右方向の変位を検出する左右変位センサ8とを有している。
(もっと読む)
作業機
【課題】 圃面の状況の如何にかかわらず走行基準線を確認しながら作業走行を容易に行い得る作業機を提供する。
【解決手段】 所望の走行方向を指し示す走行基準線Xと、その走行基準線Xに沿って進むべき走行機体の現在位置を示す機体標示73とを表示する液晶表示部69を設け、液晶表示部69を運転操縦部に備えてある。
(もっと読む)
圃場走行作業用農作業車
【課題】圃場の往復作業走行の折返し部に来た際に、作業部の取扱いを要することなく機体を旋回することができるとともに、その旋回過程においてハンドル戻し等の再度の旋回操作をした場合であっても、作業部の上昇動作を招くことなく一連の動作を継続することができる圃場走行作業用農作業車を提供する。
【解決手段】圃場走行作業用農作業車は、圃場を旋回走行しうる機体と、作業位置まで下降して圃場走行作業をする作業部7と、その制御部21とを備えて構成され、上記制御部21は、機体走行中の旋回操作の検出に応じて作業部7の停止から、非作業位置への上昇、作業位置への下降、稼動までの一連の動作を制御する旋回連動制御を行うとともに、この旋回連動制御における作業部7の稼動動作に到る前の作業位置への下降動作から所定の旋回走行範囲について、作業部7を作業位置に維持するように制御する。
(もっと読む)
操向制御方法及び装置
【課題】
視界に入っている一行程前に移植された苗一列全てに対してただ一つの直線を定め、これに対して平行に移植機を走行させる。
【解決手段】
移植機に設けた撮像手段によって既植の苗列を撮像して苗列の画像情報を取得するステップと、該画像情報から苗列領域が抽出された2値画像を取得するステップと、該2値画像を逆透視変換して2値化された苗列領域の仮想地平面画像を取得するステップと、該仮想地平面画像において該苗列領域を直線で近似するステップと、該直線に対する移植機の位置情報に基づいて操向制御を行うステップとを有する。
(もっと読む)
農作業車の作業機昇降制御装置
【課題】従来、トラクタで異形の圃場を作業する場合、ハンドルの操作パターンは様々で、ハンドル操作に連動させて作業機を自動上昇及び下降させる作業機昇降制御装置を作動させると、畦際移動時等に自動降下が作動し、作業性の悪化を招いたり、可動部を障害物に接触させて損傷するなどの問題があった。
【解決手段】トラクタに、車体に対し昇降可能に装着した作業機Rを昇降駆動する油圧昇降シリンダ10と、車体の旋回操作を検出するハンドル切角センサ22を備える。また、旋回モード設定器23を備え、前記旋回操作に連動して作業機Rを非作業位置へ上昇させ旋回終了時に作業機Rを上昇位置のまま保持する第一モード(オートリフトアップ)と、前記旋回操作に連動して作業機Rを上昇させ且つ旋回終了時に下降させる第二モード(フルオートリフト)を選択する構成とした。
(もっと読む)
1 - 10 / 10
[ Back to top ]