
Fターム[2B043EC18]の内容
農業機械一般(操向) (6,001) | 検出量の伝達又は処理 (391) | 検出量の処理と制御 (323) | 目標値又は基準値の設定と補正 (32)
Fターム[2B043EC18]に分類される特許
1 - 20 / 32
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
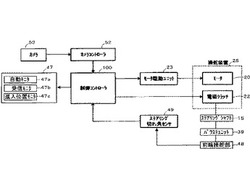
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
自走車両

【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
施肥装置
【課題】圃場の形状・寸法にかかわらず、効率性の高い走行経路の設定ができるとともに、走行経路の設定を行いながら連続的に施肥できるようにする。
【解決手段】第1設定点P1と第2設定点P2とを結ぶ基準線L0を設定する制御と、基準線L0と対向する平行な第2枕地走行経路L12を設定する制御と、第2枕地走行経路L12上に第3設定点P3を設定する制御と、第3設定点P3を設定することにより第2枕地走行経路L12の位置を設定する制御と、設定された第2枕地走行経路L12の位置に基づいて、第1枕地走行経路L11と第2枕地走行経路L12の間の距離を算出するとともに、第1枕地走行経路L11と第2枕地走行経路L12の間の施肥範囲B1中で施肥されてない範囲を算出し、枕地走行経路L1と内側走行経路L2を備えた走行経路Lを設定する。
(もっと読む)
農作業車の旋回開始位置設定装置及び旋回開始位置設定方法
【課題】農作業車が枕地において確実に旋回できる旋回開始位置を自動的、且つ確実に設定する。
【解決手段】GPSによる位置情報に基づいて、農作業車100の走行起点とする原点Pを設定する原点設定部1と、原点Pから直線状の基準線L1を設定する規準線設定部3と、原点Pからの移動距離を計測する移動距離計測部4と、農作業車100の実際の走行距離を計測する走行距離計測部5と、計測された移動距離と走行距離との差を算出する距離差算出部6と、農作業車100が旋回していると判定する旋回判定部7と、農作業車100の旋回が判定された位置に旋回判定点P2を設定する旋回判定点設定部8と、規準線L1上の任意の位置に直線基準点P3を設定する直線基準点設定部9と、旋回判定点P2から規準線L1に戻って、規準線L1上の距離差がない最終地点を検出し、この最終地点を旋回開始位置P4として設定する旋回開始位置設定部10とを備えた。
(もっと読む)
作業車両
【課題】耕耘作業を行う作業車両の発進時に、耕耘負荷や走行負荷が大きい場合であっても、エンジン回転数の低下を抑制することができ、エンジンの停止を回避することができる作業車両を提供する。
【解決手段】走行速度を変速する無段変速機を備え、ロータリ耕耘装置を昇降可能に装着する作業車両となるトラクタであって、前記トラクタが停止し、前記ロータリ耕耘装置が接地し、かつ、前記ロータリ耕耘装置が駆動して、その後、前記トラクタが発進する場合は、その発進から規定距離X又は規定時間Tが経過するまでは、前記無段変速機の目標変速比を所定の補正率で減速側に補正するものである。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応すること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量を変更可能に構成した。その結果、オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させることができる。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
作業車両
【課題】本発明の課題は、旋回外側の後輪がスリップするようなときのみ旋回内側の後輪を駆動して走行不能に陥らないようにし、悪条件化でも旋回がスムースに行えるようにする。
【解決手段】制御部(163)に左右の後輪の回転数を検出する後輪回転センサ(205)を設け、断続的入り切り制御機能(B1)は、後輪回転センサにより検出された旋回外側の後輪の回転数に基づいて旋回内側の後輪の設定回転数を所定の演算式にて演算して設定するが、演算式は設定回転数を前記旋回外側の後輪の回転数よりも小さい値に設定する。設定回転数よりも検出される旋回内側の後輪の回転数が大きいときは旋回内側のサドクラッチを切りにし、設定回転数よりも検出される旋回内側の後輪の回転数が小さいときは旋回内側のサイドクラッチを入にする構成とする。
(もっと読む)
水田作業機
【課題】植播系作業装置の昇降に関連して作動するように構成された昇降関連作業装置の作動を、不要な誤操作などを生じる虞少なく行えるようにする。
【解決手段】植播系作業装置の昇降作動方向、及び植播系作業装置が所定高さ位置H2の上側または下側の何れの側に位置するかの判別結果に基づいて、昇降関連作業装置の作動状態を、昇降作動行程中における所定高さ位置H2の上側と下側とで互いに作動状態が異なり、かつ所定高さ位置H2の下側における作動状態が、昇降作動行程の上昇行程でも下降行程でも同じ作動状態に維持されるように構成し、所定高さ位置H2を変更可能にした。
(もっと読む)
作業機
【課題】旋回内側の後輪による圃場の荒らしが軽減できると共に、連結されている作業装置などの揺れや振動を低減し、操作性を向上させる作業機の提供である。
【解決手段】原動機20を備えた走行車体2と、前輪10及び後輪11と、操縦席31と、操向ハンドル34と、操向ハンドル34の操作に連動して前輪10の向きを変更できるステアリング機構(86Iなど)と、走行車体2の後側に昇降リンク装置3により装着された苗植付部4と、原動機の回転数検出手段102と、ステアリング機構(86Iなど)に連動して旋回内側の後輪11の駆動力を断続的に入切する制御機能Bを備えた制御装置163とを備えた作業機であって、制御装置163は、原動機回転数検出手段102により検出される回転数が所定値以上である場合に制御機能Bの旋回内側の後輪11のサイドクラッチの入切周期の入り時間の割合を減少させる補正機能Cを有する。
(もっと読む)
作業車両
【課題】旋回内側後輪のスリップが発生する圃場状況にあっても、円滑な旋回走行を確保するとともに、作業部の下降および再稼動の位置ずれを抑えて作業精度を確保することができる作業車両を提供する。
【解決手段】作業車両は、前輪10の操舵開始により、旋回内側後輪の回転距離のカウント開始、作業部4の停止、旋回内側後輪11のサイドクラッチ切、同後輪11の回転距離nに基づく設定値N2対応の作業部4の再稼動までの一連の旋回連動制御をする制御装置163を備えて構成され、この旋回連動制御は、内側サイドクラッチの断続動作によって旋回内側の後輪11に外側と同速の走行動力を間欠的に伝動する内側間欠伝動制御に切替え可能に構成し、この内側間欠伝動制御への切替えと対応して設定値N2を小さくする補正を行うようにしたものである。
(もっと読む)
走行散布作業機
【課題】GPS信号に基づき走行散布作業機の位置情報を得て、隣接位置での重複した農作業を行なうことがないようにした走行散布作業機を提供すること。
【解決手段】GPSより得られる位置情報から機体の直進方位と、旋回開始位置から90度旋回して旋回戻し位置(e地点)に達した後、さらに90度旋回して直進する隣接作業方位を求め、肥料噴管からの粉粒体の散布幅を読込み、求めた直進方位と隣接作業方位から両方位間の移動距離d1を算出し、隣接作業方位から隣接作業方位と旋回戻し位置の移動距離d2を算出し、移動距離d1から隣接作業方位と前記旋回戻し位置の間隔を差し引いて前記間隔(移動距離d1−d2)を算出し、旋回開始位置と旋回戻し位置の間隔(移動距離d1−d2)を位置情報に変換して旋回戻し位置を求め、旋回を開始すると粉粒体散布装置を駆動停止させ、隣接作業位置(f地点)に達すると粉粒体肥料散布装置を駆動開始させる。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 操舵ハンドルとオペレータシートを備え、転向車輪と後輪の4輪で駆動する構成とし、機体後部に昇降部を介して昇降可能に植付部を設けた田植機において、旋回時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、該カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上でなく、その後、カウントが第二の所定値(n2)になったとき、植付クラッチを入にする連動制御を備え、カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上であれば、連動制御を終了する制御装置を設けた。
(もっと読む)
田植機
【課題】 圃場の往復作業走行における苗植付け等の水田作業に支障を来すことなく、畦際部分の機体旋回による圃場の荒れに対して適正な水田作業が可能となり、さらに、植付部を適正に稼動することができる田植機を提供することにある。
また、土壌の脆さに起因する旋回抵抗の増加との関連性に基づき、圃場の凹凸を強力に均平して、機体の沈没を防止でき、適正な水田作業が可能となる田植機を提供することにある。
【解決手段】 機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部22を備える田植機において、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、植始め自動切替スイッチ23が入であることを条件に、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
農作業車
【課題】 旋回制御にあっては、目標の180度の操向旋回や作業条合わせ等を自動的に行なわせることが難しい。
【解決手段】 ステアリングハンドルの切れ角を検出するハンドル切れ角センサと、左右の後車輪へ伝動する伝動軸と、該伝動軸の回転を検出する車軸回転センサと、後車輪のサイドクラッチを設け、車体の後部に苗植装置を昇降可能に装着し、苗植装置を上昇させると車軸回転センサにより回転数のカウントを開始し、伝動軸の回転数のカウント値が第一の目標回転数N1に到達したことを車軸回転センサが検出するのに起因して苗植装置を自動的に下降させる信号を出す旋回連動制御装置を設け、該旋回連動制御装置は、伝動軸の回転に対するハンドル切れ角θの関係に基づいて補正値n0を演算し、該補正値n0により前記第一の目標回転数N1を補正する構成とした。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
コンバインの方向制御装置
【課題】左右方向及び前後方向の株間を共に例えば30cmとした粗植栽培方式の圃場において、コンバインの方向制御を迅速に実行する。
【解決手段】刈取搬送部(6)に刈取対象穀稈への接近状態を検出できる方向センサ(21)を設け、該方向センサ(21)の検出結果に基づいて機体を操向させるように方向制御出力を行なうと共に刈取対象穀稈列の条横判定制御を行なう制御部(26)を設け、方向制御スイッチ(32)が入りで、前記条横判定入切スイッチ(31)が切りのときには、前記制御部(26)は条横判定をせずに方向制御出力をする構成とする。
(もっと読む)
車両
【課題】 簡単な構成で検出した物体に応じた適正な走行制御をすることができる車両を提供すること。
【解決手段】 カート路CRを走行するゴルフカート10に、前方に超音波を発信し、障害物に衝突したときに反射してくる超音波を受信することにより前方に障害物があることを検出するとともにその大きさを検出する対象物センサ31,32と、対象物センサ31,32による障害物の検出の有無および対象物センサ31,32が障害物を検出したときにはその大きさに応じてゴルフカート10の走行を制御するコントローラ25とを設けた。また、対象物センサ31,32から発信される超音波による検出範囲の幅をゴルフカート10の幅よりも少し大きくなる程度に規制するための規制部材31a,32aを対象物センサ31,32に設けた。
(もっと読む)
1 - 20 / 32
[ Back to top ]