
Fターム[2B043EE06]の内容
農業機械一般(操向) (6,001) | 報知装置の構成、配置又は取付け (86) | 報知装置の構成 (25) | 光 (15)
Fターム[2B043EE06]に分類される特許
1 - 15 / 15
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
苗移植機

【課題】
畦際作業の際に、線引きマーカが一側に連続して作動し、畦や圃場に植え付けた苗に線引きマーカが接触することを防止可能な苗移植機を提供する。
【解決手段】
畦際での植付作業を検知する畦際検知部材76を設け、畦際検知部材76が畦際での植付作業を検知すると、苗植付部4を昇降させてもマーカ切替装置72の線引きマーカ68の作動方向を切り替えない構成とすると共に、畦際検知部材76が畦際での植付作業を検知すると線引きマーカ68の昇降回数を記憶する作動回数検知部材77を設け、作動回数検知部材77の検知回数が所定回数未満であるときは苗植付部4を昇降させてもマーカ切替装置72の作動方向を切り替えない構成とすると共に、作動回数検知部材77の検知回数が所定回数以上になると線引きマーカ68が圃場に線を形成しないようにマーカ切替装置72の作動を停止する構成とする。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
作業車両
【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
農業用管理システム
【課題】多数の圃場の中から正確に農作業をする圃場を識別することができるGPS衛星を利用した管理システムを提供すること。
【解決手段】農業機械10の電子制御機器11は、記録媒体16の情報を読み取ると、GPS衛星13からの電波の受信により割り出した農業機械10の圃場識別情報Aと記録媒体16から読み取った特定の圃場の位置情報Bと照合して農業機械10のモニタ12に圃場識別情報Aと特定の圃場の位置情報Bを表示させ、農業機械10が当該特定の圃場の位置に到着すると、当該特定の圃場の圃場内情報Cを表示させる機構を備えているので、特定の圃場位置情報Bに対応する圃場識別情報Aを交互に又は同時にモニタ12に表示しながら移動できるので、その地域の土地勘のないオペレータも迷うことなく前記特定の圃場に到着できる。
(もっと読む)
作業車
【課題】直進状態と旋回状態とに切り換え自在な操向手段を備えて、直線状の作業経路に沿って走行する直進走行と前記直線状の作業経路の終端部から次回の直線状の作業経路に向けて予め定めた設定走行パターンにて走行する経路変更用走行とを繰り返す形態で作業を行う作業車に関する。
【解決手段】作業経路変更用走行を自動で行うように前記操向手段101を切り換え制御する作業行程切換制御を実行する自動旋回制御手段102と、前記作業経路変更用走行の開始を指令する手動操作式の自動旋回指令手段SWとが備えられ、前記自動旋回制御手段102が、前記自動旋回指令手段SWの指令に基づいて前記作業行程切換制御を実行するように構成する。
(もっと読む)
農作業機
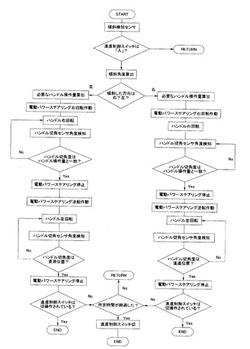
【課題】走行機体に動力を供給する動力源の駆動及び走行機体に連結してある作業機の作動を制御する複数の制御方法を適宜選択し、操作性及び利便性を向上させることができる農作業機を提供する。
【解決手段】耕耘機制御装置は前記作業モード切替スイッチが押下されたことを示す信号が入力され(ステップS1)該スイッチにより選択された作業モードが通常モードであるときは(ステップS2)所定のランプを点灯させて通常モードでの制御を行う(ステップS3、S4、S5)。選択された作業モードが枕地モードであるときは(ステップS6)所定のランプを点灯させて枕地モードでの制御を行う(ステップS7、S8、S9)。選択された作業モードが走行モードであるときは(ステップS6)所定のランプを消灯させて走行モードでの制御を行う(ステップS10、S11、S12)。
(もっと読む)
コンバイン
【課題】回転式の操向操作具に設けた進路変更手段によって進路変更操作を容易・確実にすると共に、スピン旋回を入り切りさせて誤操作を防止できるものとする。
【解決手段】旋回用の油圧式無段変速装置(40)の回転出力を、モニターを備えた操向操作具(16)の操作によって調節できるように構成する。そして、操向操作具(16)を左右いずれかに回転操作すると回転操作方向側のホイル軸(30)を減速させて旋回し、操向操作具(16)とは別の操作具の操作によってスピン旋回を入りにした状態で操向操作具(16)を更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回すると共に表示部(22)に操向操作具(16)の回転操作状態を表示するように構成する。更に、操向操作具(16)の回転操作によらずに機体を左右に方向修正することのできる進路変更手段(17)を設ける。
(もっと読む)
農業用管理システム
【課題】多数の圃場の中から正確に農作業をする圃場を識別することができるGPS衛星を利用した管理システムを提供すること。
【解決手段】トラクタ10に設けた電子制御機器(ECU)11は、GPS13からの電波の受信により割り出して得られる各圃場ごとに圃場NOを付与した地図情報上のトラクタの所在する圃場NOを情報端末モニタ画面12に表示できるようにし、トラクタのECUと、該ECUに接続された携帯端末から無線通信により前記圃場NOを含む各種情報を基地局に発信する。携帯端末が基地局へ各種情報を送信する時に自動的に無線通信を開始し、基地局での前記各種情報の受信完了時点で無線通信を自動的に切断する携帯端末の通信制御機構と、前記圃場NOが携帯端末から入力されると、GPSからの電波の受信により割り出した農業機械の圃場識別情報を正しい圃場NO情報に補正してトラクタの情報端末モニタ画面に表示させる指令を基地局に送る圃場識別情報補正制御機構とを備えている。
(もっと読む)
作業機
【課題】 圃面の状況の如何にかかわらず走行基準線を確認しながら作業走行を容易に行い得る作業機を提供する。
【解決手段】 所望の走行方向を指し示す走行基準線Xと、その走行基準線Xに沿って進むべき走行機体の現在位置を示す機体標示73とを表示する液晶表示部69を設け、液晶表示部69を運転操縦部に備えてある。
(もっと読む)
農薬散布用ホバークラフト
【課題】水田用ホバークラフトが操縦者から遠く離れた位置にあっても、的確に当該水田用ホバークラフトに対する操縦が実施できる極めて操作性が良い農薬散布用ホバークラフトを提供する。
【解決手段】本発明に係る農薬散布用ホバークラフト1は、ホバークラフト本体2に農薬用タンク3と散布装置6を装着し、遠隔操作によって散布装置6及びホバークラフト本体2を操作可能としたラジコンホバークラフトにおいて、ホバークラフト本体2後部に構成されるファンダクト11の上部に、船艇前方の映像をコントローラ21上のモニタ22に写すためのCCDカメラ13及び障害物に対する設定距離以上の接近を感知しコントローラ21上のスピーカ23から警告音を発生させる超音波センサー装置14を設けた。
(もっと読む)
コンバイン
【課題】路上走行における機体の旋回に際して、オペレータの操作負荷の軽減を図りつつ、適切なタイミングで確実に方向表示手段の動作制御を可能とするコンバインを提供する。
【解決手段】コンバインは、左右の走行部1により走行可能に支持された機体と、その左右の走行部1の速度差を操向操作具11aの操作と対応して調節する旋回手段と、機体の旋回方向表示のための方向表示操作具11bによる表示操作と対応して左右いずれかの方向表示動作を開始する方向表示手段7,8とを備えて構成され、上記方向表示手段7,8には方向表示の開始と停止とを制御する制御部21を設け、この制御部21は、上記操向操作具11aの左右の操作方向を判別し、この左右の操作方向に対して方向表示が逆方向となることを条件に表示動作を停止制御するものである。
(もっと読む)
農作業機
【課題】効率良く作業ができ、かつ畦道等を通る人や車等に注意を促すことができる農作業機を提供する。
【解決手段】農作業機1は、トラクタの後部に連結する左右方向に長手状の作業機本体11を備える。作業機本体11はフレームパイプ部4を有し、フレームパイプ部4の長手方向両端部にはチェーンケース部6およびブラケット部7を設ける。チェーンケース部6の上端部およびブラケット部7の上端部には、作業機本体11の側端部位置を視認するための光発生手段13を設ける。
(もっと読む)
水田作業機の指標形成マーカ操作構造
【課題】 次の作業行程における走行基準となる指標を田面に形成する左右一対の指標形成マーカをそれぞれ出退操作可能に備えるとともに、各指標形成マーカの突出作動指令を出すマーカ選択手段を備えた水田作業機のマーカ操作構造において、マーカ選択操作を誤っても速やかに修正操作を行って作業に移行することができるようにする。
【解決手段】 前回のマーカ突出作動方向を記憶する記憶手段と、記憶されている前回のマーカ突出作動方向と今回の突出作動指令によるマーカ突出作動方向との相違を判断する判断手段と、記憶されている前回のマーカ突出作動方向と今回の突出作動指令によるマーカ突出作動方向とが同一であることが判断されると作動する報知手段とを備えてある。
(もっと読む)
1 - 15 / 15
[ Back to top ]