
Fターム[2B063AA08]の内容
移植機(田植機の接地部) (1,596) | 目的、機能 (297) | 移植機等の性能向上 (291) | 植付精度の向上 (36)
Fターム[2B063AA08]に分類される特許
1 - 20 / 36
苗移植機
【課題】整地ロータの回転や機体の前進に伴う泥水流が、整地ロータ周りで、圃場に植え付けた苗に悪影響を及ぼさないようにした苗移植機を提供すること。
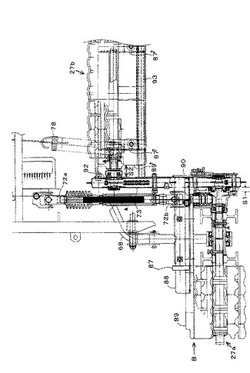
【解決手段】昇降自在な苗植付部4の下部に圃場面を均す左右一対の整地ロータ27aと中央の整地ロータ27bを設け、ロータ27a,27b間で駆動力を伝動する伝動部材73aを収納した伝動ケース73を設け、該ケース73に左右の取付フレーム88を取り付け、このフレーム88に泥除け部材89を取り付け、左右の整地伝動ケース73と左右の泥除け部材89の間に間隔部S1を設ける。また伝動ケース73の機体内側上部に左右の上部支持ステー92を配置し、該上部支持ステー92の間に中央の取付ロッド93を設け、該取付ロッド93に左右一対の支持アーム87’を取り付け、該支持アーム87’の間に中央泥除けカバー89’を装着し、該中央の泥除け部材89’と伝動ケース73の間に間隔部S2を設けた。
(もっと読む)
田植機

【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
苗移植機
【課題】
圃場の凹凸の多少、及び苗の植付姿勢を撮影装置で撮影し、撮影された画像に合わせて苗植装置の昇降、及び植付姿勢の安定化を自動的に図る苗移植機を提供する。
【解決手段】
苗取口4を形成した苗受ガイド5に送る苗タンク6と、苗タンク6の下部に設ける圃場面を滑走するセンタフロート1とサイドフロート2と、苗取口4を下降して苗を植え付ける植付装置7を設けて苗植装置8を構成し、苗植装置8を前輪10及び後輪12を備えた走行車体14の後側に装着した苗移植機において、苗植装置8の上方位置に圃場面の凹凸を表わす画像を撮影する撮影装置17を設け、撮影装置17が撮影した画像で圃場面の凹凸の多少を判別し、圃場面の凹凸が多いときは昇降リンク16を昇降させる昇降シリンダ15の昇降制御感度を低下し、圃場面の凹凸が少ないときは昇降シリンダ15の昇降制御感度を上げる制御構成とする。
(もっと読む)
田植機のフロート
【課題】作業に伴う水の流れを車両後方へ導出するとともに車両全幅に亘って整地可能および荷重調節可能としたフロートを備え、作業性および作業効率を向上させた田植機を提供する。
【解決手段】車両後部に植付部15を配設し、植付部15を構成する苗載台16は、植付フレーム20に左右往復摺動自在に支持し、植付フレーム20に植付深さ調節支点軸67を回動自在に枢支させるとともに、植付深さ調節支点軸67には、ブラケット68,69および植付深さ調節リンク70,71を介して取付けた、センターフロート34およびサイドフロート35からなる複数のフロート34,35を備え、センターフロート34とサイドフロート35とは、車両進行方向のフロート34,35の接地面の軌跡が、センターフロート34とサイドフロート35の間で整地残りを防止する形状とした。
(もっと読む)
苗移植機の畦際代掻装置
【課題】
土質が硬い畦際でも土壌面を均平にすることができ、畦際に植え付けられる苗の植付深さを安定させると共に、ロータの回転により発生する泥水流の発生を抑えられる苗移植機を提供する。
【解決手段】
畦際クラッチレバー13の操作で一部の苗植付条域の植付装置5の伝動を停止した状態で畦際植付行程を苗植すると共に、代掻ロータ12のうち畦際植付条域Aの代掻ロータ12Aの伝動回転速を、他の植付条域Bの代掻ロータ12Bの伝動回転速に対して変速可能に構成すると共に、サイドロータ12Sの回転内周部にサイドロータ軸16の周りに回転自在、またはセンタロータ12Cとは異なる回転の抵抗ロータ19を設ける構成とする。
(もっと読む)
水田作業機の整地フロート構造
【課題】全条の植付幅に相当する横幅を有する整地フロートであっても、泥押しを抑制できて、既植え苗に対する影響を抑え、植付が良好に行われる水田作業機を提供する。
【解決手段】全条の植付幅に相当する横幅を有する整地フロート11を設け、整地フロート11の底面における横幅方向の全長又は略全長に亘って、横幅方向に沿った帯状を呈する帯状整地部Aを形成し、帯状整地部Aに、後方に泥土を誘導すべく上方に凹入する泥逃がし凹入部27Aを形成してある。
(もっと読む)
乗用型田植機
【課題】 本発明の課題は、安定した均平効果を得ることができ、圃場が荒れやすい枕地あるいは枕地近くにおいて適正に整地が行え、ひいては植付精度を向上させることのできる整地ロータ付きの乗用型田植機を提供することである。
【解決手段】 ロータ(27a,27b)の設定高さを調整可能な構成とすると共に、苗植付部(4)の上下位置の制御感度を変更可能な構成とし、制御感度の変更に連動してロータ(27a,27b)の設定高さを補正する構成とした。
また、ロータ(27a,27b)の設定高さを調整可能な構成とすると共に、苗植付具への伝動を入切する畦クラッチを操作して植付条数を調節可能な構成とし、植付条数の調節に連動してロータ(27a,27b)の設定高さを下降側へ補正する構成とした。
(もっと読む)
水田作業機
【課題】種々の作業状況の違いに応じて整地装置により適切な整地性能を発揮できる状態に切り換えることが可能となる水田作業機を提供する。
【解決手段】走行機体と作業装置との間に横軸芯周りで駆動回転される回転式の整地装置が大径の整地用回転体62Aと小径の整地用回転体62Bとを備え、且つ、センサフロート9の機体前方側に対応する領域に小径の整地用回転体62Bを備えて構成され、整地制御手段が、小径の整地用回転体62Bの下端部t1をセンサフロート9の底面位置t2よりも上方に位置させる第1制御状態、それらを同じ高さに位置させる第2制御状態、小径の整地用回転体62Bの下端部t1をセンサフロート9の底面位置t2よりも下方に位置させる第3制御状態の夫々に切り換え可能に構成される。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
水田作業機
【課題】圃場面に対する作業と同時に圃場面に対して確実に溝を形成する水田作業機を構成する。
【解決手段】走行機体の後端に複数の整地フロート20を有する水田作業装置を連結すると共に、後車輪の轍上に溝切器Fを配置した。溝切器Fは、前端が整地フロート20の前端より前側にあり、後端が側面視で整地フロート20の重複する位置に配置されると共に、この溝切器Fの前端を横向き姿勢の支持ピン28を介して揺動自在に支持し、この溝切器Fの後端を下方に向けてバネ29Sで付勢した。
(もっと読む)
作業機
【課題】 本発明は、圃場状況や作業条件に対応して、整地ロータによる整地作用を適正に得られるようにすることを課題とする。
【解決手段】 走行車体の後側に昇降可能に作業部を設け、整地ロータを有する整地装置を作業部に設け、走行車体の走行速度に対する整地ロータの回転速度を変更するロータ変速装置を設け、畦際の近くでの作業であることを判別する畦際作業判別装置を設け、畦際作業判別装置により畦際の近くでの作業であることを判別されるのに連動してロータ変速装置を高速側に切り換える連動装置を設けた作業機とした。
(もっと読む)
乗用型田植機
【課題】フロートの揺動を電気的に検出する検出装置に、泥水などが飛散しないようにした乗用型田植機を提供する。
【解決手段】植付部15の幅方向に延設された植付部フレーム23の両端には、苗載せ台を支持する支持ステー30,30が立設されており、これら支持ステー30,30の中間部には、連動軸が架設されている。連動軸にはモータ・ポテンショベース59が遊嵌されていると共に、モータ・ポテンショベース59の機体後方側にはフロート揺動角検出ポテンショメータ55が取付けられている。フロート揺動角検出ポテンショメータ55のアーム76は、検知フロート16aの先端部と検出リンク56を介して連結されており、フロート揺動角検出ポテンショメータ55は、検出リンク56によって検知フロート16aの揺動を検出している。
(もっと読む)
水田作業機の整地フロート構造
【課題】圃面上の泥水の波立ちを抑え、隣接する条への影響を抑制することのできる水田作業機の整地フロート構造を提供する。
【解決手段】整地フロート11の前端に、整地フロート11の上面に圃面上の泥水を誘導する泥水誘導部13Bを形成している。
(もっと読む)
水田作業機の整地フロート構造
【課題】全条の植付幅に相当する横幅を有する整地フロートであっても、泥押しを抑制できて、既植え苗に影響を抑え、植付が良好に行われる水田作業機を提供する。
【解決手段】全条の植付幅に相当する横幅Lを有する整地フロート11を設け、整地フロート11の底面における横幅方向の全長又は略全長に亘って、横幅方向に沿った帯状を呈する帯状整地部Aを形成し、前記帯状整地部Aに、後方に泥土を誘導すべく上方に凹入する泥逃がし凹入部27Aを形成してある。
(もっと読む)
水田作業機の整地フロート構造
【課題】3条以上の植付幅に相当する横幅を有する整地フロートであっても、泥押しを抑制できて、既植え苗に対する影響を抑え、かつ、整地フロートのフロート通過跡が圃面上に形成され難く、植付が良好に行われる水田作業機の整地フロート構造を提供する。
【解決手段】3条以上の植付幅に相当する横幅Lを有する整地フロート11を設け、整地フロート11の底面における横幅全長又は略全長に亘って、横幅方向に沿った帯状を呈する帯状整地部Aを形成し、整地フロート11の底面における左右中央部で底面の前端から後方に向かって、泥土を取り込む中央側泥取り込み凹入部23を形成してある。
(もっと読む)
田植機
【課題】駆動用アクチュエータにより整地装置を駆動する田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を取り付けた田植機において、整地装置は、左右方向に伸延させて駆動用のアクチュエータを連動連設した回転軸と、同回転軸の外周に同心的に取り付けた整地ローターとを具備すると共に、整地ローターを植付圃場を整地する整地対象面に接地させた整地作業位置と、同整地ローターを前記整地対象面から上方に離隔した非整地作業位置との間で昇降させるようにし、整地作業時のアクチュエータの負荷を検出可能として、同検出負荷に応じて整地ローターの位置を昇降変更させるようにしている。
(もっと読む)
田植機
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
田植機
【課題】駆動用アクチュエータにより整地装置を駆動する田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を取り付けた田植機において、整地装置は、左右方向に伸延する回転軸と、同回転軸の外周に同心的に取り付けた整地ローターとを具備し、上記回転軸に駆動用のアクチュエータを連動連設して、同アクチュエータにより回転軸を介して整地ローターの回転速度を可変となしている。
(もっと読む)
苗移植機
【課題】本発明では、圃場を滑走するフローとの前側に整地ロータを配設した苗移植機で、苗植付部の左右ローリングと対地高さの制御感度の調整時の制御方法に工夫を凝らすことで苗植付部の苗植え付け深さが均等になるようにすることが課題である。
【解決手段】走行車体の後部に整地ロータとフロートを備えた苗植付部を設け、水平センサが検出する苗植付部の左右の傾きとフロート迎い角センサの検出する圃場面の前後傾きでローリングモータと昇降用油圧電磁バルブを制御して苗植付部のローリングと昇降を制御する苗移植機において、各センサの検出信号に対する制御動作の感度を調整する感度調節手段を設け、該感度調節手段を鈍感に調整した場合に整地ロータの高さ調整量を標準よりも低く制御した。
(もっと読む)
1 - 20 / 36
[ Back to top ]