
Fターム[2B076EA09]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 操作装置の操作を牽制するもの (59)
Fターム[2B076EA09]に分類される特許
1 - 20 / 59
コンバイン
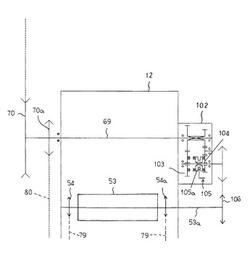
【課題】本発明では、詰まりの発生しやすいフィーダーのみを正逆に駆動切り換え可能にすることで、詰まり除去作業時の収量ロスを低減するすることを課題とする。
【解決手段】エンジン(32)の駆動力が入力される刈取入力軸(69)を、刈取装置(4)の後部に設けられ、穀稈を脱穀装置(4)に移送するフィーダ(14)の後部に設け、刈取入力軸(69)から掻込みオーガ(9)と刈刃(10)と掻込リール(11)を駆動する第一伝動経路(A)と、刈取入力軸(69)からフィーダー(14)を駆動するフィーダ駆動ドラム(53)への伝動を正転状態及び逆転状態に切り換え可能な正逆転切換クラッチ(105)を介して伝動する第二伝動経路(B)を設ける。
(もっと読む)
コンバイン

【課題】オペレータの精神的負担を軽減すること。
【解決手段】走行部の上方に運転部と脱穀部と選別部と穀粒貯留部を配設し、走行部の前方に刈取部を昇降自在に設けたコンバインにおいて、運転部に走行部を操作する操向手段を設けると共に、操向手段は、走行部を直接的に操作する操向手段本体と、操向手段本体に着脱自在に取り付けてオペレータが把持して走行部を間接的に操作する把持体と、把持体に設けてオペレータの把持した手の指先で操作する指先操作体とを具備し、把持体は操向手段本体から取り外すことで、指先操作体により走行部を遠隔操作可能な無線リモートコントローラとなした。
(もっと読む)
コンバイン
【課題】正回転クラッチと逆回転クラッチとが共に入り状態に操作されることを防止した状態で刈取り部を正逆転駆動できながら、クラッチとクラッチ操作具との連係の面から構造簡単に得ることができるコンバインを提供する。
【解決手段】刈取り部に正回転駆動力を伝達する正回転クラッチと、刈取り部に逆回転駆動力を伝達する逆回転クラッチ41とを備えてある。正回転クラッチを切換え操作する正転クラッチ操作具52と、逆回転クラッチ41を切換え操作する逆転クラッチ操作具54とを別々に設けてある。正回転クラッチが入り状態にあると、逆回転クラッチ41の入り状態への切換え操作を牽制した作用状態に切り換わり、正回転クラッチが切り状態にあると、牽制を解除した解除状態に切り換わる牽制機構70を設けた。
(もっと読む)
コンバイン
【課題】作物の収穫作業中であっても、燃料が高温となることでエンジンの作動不良が生じることを防止できるコンバインを提供する。
【解決手段】コモンレール式ディーゼルエンジン71を搭載したコンバインであって、前記ディーゼルエンジン71の回転及び機体の走行速度を制御する制御手段100と、走行速度Vを設定する変速操作手段94と、当該変速操作手段94の操作量Aを検出し前記制御手段100に送信する変速操作量検出手段94aと、前記制御手段100からの出力値を基に、前記変速操作手段94の操作量Aに対応する走行速度Vとする変速手段82aと、前記コモンレール754に供給される燃料の温度tを検出する燃料温度検出手段171と、を備え、前記制御手段100は、前記燃料の温度tが第一設定温度T1を越えると、前記操作量Aに対応する設定走行速度を低減することで走行速度Vを制限する制御をする。
(もっと読む)
コンバイン
【課題】刈取切替レバーが入り位置で速度切替レバーが高速位置となったまま走行しないようにする上で、経済的に、且つ、手間を掛けないで実施できるようにする。
【解決手段】刈取部の刈取駆動を入切り自在な刈取切替レバー20を設け、エンジン駆動によって走行自在な走行装置の走行速度を、刈取部による刈取作業に適した低速と、走行装置の移動に適した高速とに切替自在な速度切替レバー30を設けてあるコンバインであって、刈取切替レバー20が入り位置で、且つ、速度切替レバー30が高速位置の場合に、エンジンの駆動を停止させる駆動停止手段が設けてある。
(もっと読む)
乗用リールモアの速度設定機構
【課題】HSTによる変速機構を用いて、歯車噛合式の変速機構のように、簡単に作業速度のレンジと、移動速度のレンジへの切換ができきることで、刈取り中は比較的遅い一定速度で走行したり、刈取をしない通常速度で走行したりすることができる乗用リールモアの提供。
【解決手段】乗用リールモアの車速の変速機構をHST(64)により構成し、該HST(64)の変速操作を前進走行変速ペダル(21)と後進走行変速ペダル(22)とにより行う乗用リールモアの速度設定機構において、前記前進走行変速ペダル(21)の踏込みレンジを、作業速度レンジと移動速度レンジに分け、芝刈り作業時において、該前進走行変速ペダル(21)の前記移動速度レンジへの踏込みを牽制する作業速度設定ペダル(66)を設けた。
(もっと読む)
コンバイン
【課題】刈取部の昇降操作や車体の操向操作を行うレバー操作具の把持部にスイッチ操作具を設け、オペレータの意図しない刈取部の昇降作動又は車体の操向作動を防止するコンバインを提供することを課題としている。
【解決手段】レバー操作具54の把持部側に設けたスイッチ操作具64と、レバー操作具54のレバー操作を検出するレバー操作検出手段72,73,74,76と、該レバー操作検出手段72,73,74,76の検出結果に基づいて刈取部4の昇降及び車体の操向制御を行う制御部60とを備えたコンバインにおいて、スイッチ操作具64の押し操作が検出されている際は、レバー操作検出手段72,73,74,76の検出結果に基づく刈取部4の昇降又は車体の操向を規制する規制制御を行うように前記制御部60を構成する。
(もっと読む)
コンバイン
【課題】本発明は、クラッチ操作レバーを、作業開始時のクラッチ切り操作状態から両クラッチ入り操作状態にするのに、デテント機構を採用しながら中間の脱穀クラッチ入り操作位置を感じることなく操作をすることができるクラッチ操作レバーの操作構造を提供することを目的とする。
【解決手段】クラッチ操作レバー20を保持するデテント機構25を備えるとともに、クラッチ操作レバー20のクラッチ切り操作位置OFFから両クラッチ入り操作位置ON2への操作、及びこれとは逆の操作のうち、少なくとも一方の操作時において、クラッチ操作レバー20が脱穀クラッチ入り操作位置ON1に位置すると、デテント機構20の係合部32を被係合部31に係合させないスルー機構45を設けてある。
(もっと読む)
コンバイン
【課題】穀稈の状況に応じた適切な進路を把握でき、刈取作業が行いやすくなるコンバインを提供する。
【解決手段】走行部2と、前記走行部2の前方に配置される刈取部3と、前記刈取部3の後方で前記走行部2の前部上に配置される運転部8とを備えるコンバイン1であって、前記運転部の前方を撮影する第一撮影手段12と、前記第一撮影手段12により撮影された映像を表示する表示装置85と、前記運転部8の操向操作手段(ハンドル82)の操作量に基づいて予測進路軌跡Bを作成する制御装置97とを備え、前記制御装置97は、前記予測進路軌跡Bを前記第一撮影手段12により撮影された映像に重畳させ、この予測進路軌跡Bが重畳された映像を前記表示装置85に表示させる。
(もっと読む)
コンバイン
【課題】刈取クラッチ操作具と脱穀クラッチ操作具とが切り操作位置に位置する状態を検出する検出構造の簡素化を図り、検出情報に基づく信号処理も簡単なものにして、エンジン始動に対する有効な牽制構造を構築する。
【解決手段】脱穀クラッチレバー11を切り操作位置に操作すると、刈取クラッチレバー9を切り操作位置に連動させる連係ロッド9Dを設ける。脱穀クラッチレバー11が切り操作位置に操作されたことを検出する単一のリミットスイッチ16を設ける。リミットスイッチ16の検出結果に基づいてエンジン始動を許容する制御手段21を設けている。
(もっと読む)
コンバインの刈取前処理構造
【課題】中央側昇降フレームと搬送ケースとの間での切断茎稈の詰まりを抑制して、刈取り性能の向上を図れるコンバインの刈取前処理構造を提供する。
【解決手段】副切断装置14を、走行機体2より前方側に延出した複数本の昇降フレームで構成される昇降フレームユニット13に取付ける。昇降フレームユニット13における走行機体横幅方向の中央側に位置する中央側昇降フレーム13Aを、刈取搬送装置とその刈取搬送装置の下方に位置する車軸ケース25との間に配置される中央側上部フレーム部13aと、中央側上部フレーム部13aの先端から車軸ケース25の前方側で下向きに屈曲して延出される中央側下部フレーム部13b,13cで構成してある。
(もっと読む)
コンバイン
【課題】走行用HSTが可変容積型ポンプ及び可変容積型モータを備え、前記モータが小容積状態及び大容積状態間で切替可能とされたコンバインの傾斜地での走行安全性を向上させる。
【解決手段】制御装置は、傾斜センサからの信号に基づき機体の傾斜角度が所定値を越えていると判断する場合には、走行モード切替操作部材からの人為操作信号、好ましくは、高速モード選択信号のみを無視するように構成される。他態様においては、制御装置は、傾斜センサからの信号に基づき機体の傾斜角度が所定値を越えていると判断する場合には、走行モード切替操作部材からの人為操作信号に拘わらず、前記モータが大容積状態となるように走行モード切替作動機構を強制的に作動させる。
(もっと読む)
コンバイン
【課題】手扱ぎ作業時に、機体の操作を行うことが可能であるとともに、誤操作を防止することができるコンバインを提供する。
【解決手段】コンバインは、エンジンを搭載した走行機体と、刈取部と、脱穀装置と、リモートコントローラ90と、コントローラ装着部91と、機能切替スイッチ98と、を備える。リモートコントローラ90は、走行機体の前進操作及び後進操作が少なくとも可能である。コントローラ装着部91は、リモートコントローラ90を着脱可能に装着可能である。機能切替スイッチ98は、リモートコントローラ90がコントローラ装着部91に装着されたことを検出する。そして、リモートコントローラ90による操作は、当該リモートコントローラ90がコントローラ装着部91に装着されたことを機能切替スイッチ98が押されることで検出した場合にのみ有効となる。
(もっと読む)
コンバインのクラッチ操作装置
【課題】刈取系のクラッチと穀粒搬出用クラッチとを備えるコンバインにおける各クラッチの入り切り制御を誤操作少なく、かつ迅速に行えるようにする。
【解決手段】刈取クラッチ30が入り状態であると前記穀粒搬出用クラッチ50の入りを阻止し、前記穀粒搬出用クラッチ50の入り状態で前記刈取クラッチ30が入り操作されると、これに伴って前記穀粒搬出用クラッチ50を切り状態に切換操作する制御手段101を備えた。
(もっと読む)
コンバインの走行制御装置
【課題】枕地での旋回の際にも脱穀装置を適正に駆動し、しかも、枕地での旋回を走行用の駆動力の不足を避けた状態で適切に行えるコンバインの走行制御装置を提供する。
【解決手段】走行用の静油圧式無段変速装置7の油圧モータ7Mにおける容量変更用の操作部7Maを設定目標位置に維持させるように、その操作部7Maが低速側に移動するのを高速側に移動操作する操作力にて保持する保持手段56の操作力を変更調整する操作力調整手段58作動を制御する操作力調整処理を実行する制御手段79が、刈取作業状態検出手段Uにて刈取作業状態から非刈取作業状態切り換ったことが検出されたのちにおいては、操作部7Maが設定目標位置よりも低速側に移動しても、刈取処理直後用の設定上限値を超えて保持手段56の操作力を増加させない形態にて操作力調整手段58の作動を制御する刈取処理直後用の操作力調整処理を実行するように構成されている。
(もっと読む)
刈取収穫機
【課題】刈取収穫機において、走行用の変速装置を移動走行用の高速位置、刈取作業用の中速位置、及び倒伏が激しい作物を刈り取る倒伏刈取作業用の低速位置に操作自在に構成した場合、刈取部用の変速装置を適切に連係させる。
【解決手段】走行用の変速装置7Mが高速位置に操作された移動走行状態と、走行用の変速装置7Mが中速位置に操作され且つ刈取部用の変速装置18が低速位置に操作された標準刈取状態と、走行用の変速装置7Mが低速位置に操作され且つ刈取部用の変速装置18が高速位置に操作された低速刈取状態とを設定する。人為操作具87,88により移動走行状態、標準刈取状態、低速刈取状態を設定可能に構成する。
(もっと読む)
コンバインの排藁結束装置
【課題】脱穀部から排藁搬送装置を介して搬送される排藁の株元を揃える根揃え板を備えたコンバインにおいて、脱穀部に投入される前に既に折れ曲がった状態にある倒伏材の株元と根揃え板との当接により、稈姿勢の乱れを伴った結束ミスや詰まりが誘発されることを防止する。
【解決手段】根揃え板移動装置73による根揃え板71の排藁の稈身方向への移動制御を、株元検知手段97による検出結果に基づいて根揃え板71を適正な根揃え位置に合わせる通常制御モードと、前記株元検知手段97よる検出結果に拘らず、当該根揃え板71を排藁の株元から離間する方向に強制的に移動させる倒伏材制御モードとに切換え可能に構成するにあたり、前記通常制御モードと倒伏材制御モードの切換えを、前処理部4の動作速度を増速する既存の操作手段35の増速操作に連動させて行えるように構成した。
(もっと読む)
コンバイン
【課題】畦際等の走行停止態の刈取作業中の不意な走行。
【解決手段】走行用静油圧式無段変速装置12により走行速度を無段階に変速可能な走行装置3の前方に、刈取搬送用静油圧式無段変速装置21により作業回転数を無段階に変速可能な刈取部4を設け、走行装置3の上方には脱穀装置2を設け、前記刈取部4は、操縦部6に設けた前記走行用無段変速装置12の主変速レバー13の傾倒操作により変速された走行速度に同調して刈取搬送用無段変速装置21が変速駆動する構成とし、前記操縦部6には、走行用無段変速装置12による走行装置3の走行を停止させた状態で、刈取部4を駆動させる刈取駆動入切手段53を設けたコンバイン。
(もっと読む)
作業車両
【課題】副変速部の高速切換状態を判断可能且つ各種制御を行うことが可能な作業車両において、その構造が簡略化され製造コストを低く抑えることが可能な作業車両を提供することを課題とする。
【解決手段】機体3を走行させる走行部1L,1Rと、エンジン9の動力を主変速部13及び副変速部18を介して走行部1L,1Rに変速伝動する動力伝動機構11と、主変速部13の変速操作を行う主変速操作具44と、副変速部18を高速と低速の少なくとも2段階で変速切換する副変速操作具46と、副変速部18の高速切換状態を検知可能な制御部51とを備えた作業車両において、車速を検出する車速検出手段54及び主変速操作具44の操作位置を検出する操作位置検出手段53を設け、制御部51が車速検出手段54及び操作位置検出手段53によって主変速操作具44の操作位置に対する車速を検出することにより副変速部18の高速切換状態を判断する。
(もっと読む)
コンバイン
【課題】旋回状態表示用としての特別のモニタ表示器が不要となり、構成の簡素化によって製造コストを低減する。
【解決手段】車台(7)の前部側にハンドル(1)の操作によって油圧式無段変速装置(2)を駆動させて旋回を行わせる差動装置(3)を内装した走行用ミッションケース(4)を設け、グレンタンク(10)に貯留された穀粒量およびエンジン(20)の回転数を基本画面(A)としてモニタ表示器(6)に表示し、左のクローラ(5a)と右のクローラ(5b)との速度差が設定速度を超えるまでハンドル(1)を操作した場合に当該速度差をオペレータに認識させる表示画面(B)をモニタ表示器(6)に表示し、左のクローラ(5a)と右のクローラ(5b)との速度差が設定速度以内に復帰するまでハンドル(1)を操作した場合には、モニタ表示器(6)から前記表示画面(B)の表示を消去して基本画面(A)の表示に戻すコントローラ(83)を設ける。
(もっと読む)
1 - 20 / 59
[ Back to top ]