
Fターム[2B304RA28]の内容
農作業機用昇降装置 (9,026) | 主要構成、被制御機器 (505) | 電気機器、センサ (45)
Fターム[2B304RA28]に分類される特許
1 - 20 / 45
苗移植機
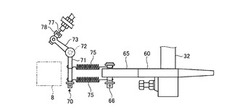
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
作業機のアンロード装置

【課題】油圧アクチュエータの停止時に油圧ポンプからの圧油を切換弁によってアンロード油路に流出させる作業機のアンロード装置を安価に得る。
【解決手段】切換弁102の背圧室から排油路104に圧油排出させる開き状態と圧油排出を停止する閉じ状態とに切り換え自在な開閉弁105、開閉弁105をパイロット油圧によって切り換え操作する制御弁107を備えてある。アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を駆動するべく操作されると、制御弁107が開閉弁105を閉じ状態に切り換え操作し、アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を停止するべく操作されると、制御弁107が開閉弁105を開き状態に切り換え操作する。
(もっと読む)
代かき作業機の耕深表示装置
【課題】代かき作業時に耕深を一定にすることができる耕深表示装置を提供する。
【解決手段】耕深表示装置40は、機体5に回転自在に支持された耕耘ロータ13の上部を覆うシールドカバー13と、この後部に上下方向に回動自在に配設されて耕耘ロータ13により耕耘された耕土を整地する第1整地板11と、この後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備える代かき作業機1に設けられる。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され、耕耘ロータ13により耕耘された耕土の耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動自在な揺動アーム42と、揺動アーム42の回動に応じて耕深を表示する耕深表示部50とを有してなる。
(もっと読む)
作業機
【課題】複数の表示装置を備えていても、表示装置の種類(機種)や仕様の変更を容易に行うことができる作業機を提供する。
【解決手段】トラクタ2は、検出器で検出した状態を表示可能な複数の表示装置(メータパネル30及び液晶モニタ80)と、該複数の表示装置がCAN通信網Nを介して接続されると共に検出器が接続され、且つ検出器で検出された状態を示す検出情報を複数の表示装置に出力するメインECU50と、を備える。メインECU50は、検出情報を表示させる表示装置を識別するための識別情報を出力する識別情報出力手段52と、該検出情報を出力する検出情報出力手段51とを有する。複数の表示装置は、識別情報によって指定されたときに、検出情報出力手段51によって出力された検出情報を表示する。
(もっと読む)
農作業機
【課題】トラクタに装着して農作業を行う農作業機であって電装品が故障又は操作不能になった場合、必要な位置にアクチュエータを強制的に作動させることができる農作業機を提供する。
【解決手段】操作部11からの操作信号を受信して、受信した操作信号に基づきバッテリ2を電源として、制御部13の制御により農作業機の一部をアクチュエータ56により作動させ、制御部13とアクチュエータ56とバッテリ2とはメインハーネス20を介して接続されており、両端にコネクタを有する作動用ハーネス25を備え、メインハーネス20は、途中で分岐して先端にコネクタを有する分岐ハーネス部21を有し、分岐ハーネス部21の先端のコネクタに作動用ハーネス25の一端のコネクタを接続し、作動用ハーネス25の他端のコネクタにアクチュエータ56を接続した場合に、バッテリ2からの電気がアクチュエータ56に直接送られてアクチュエータ56を作動させる。
(もっと読む)
苗移植機
【課題】
機体の走行により圃場の面積を算出し、算出した面積から苗の植付作業の進捗具合、苗や施肥肥料の使用量、作業に要する時間等を算出可能な苗移植機を提供する。
【解決手段】
後輪2,2の駆動回転を検出する回転検出部材1を設け、回転検出部材1が検出する後輪2,2の回転数から走行距離を算出する走行車体3に苗植装置4を設けた苗移植機において、回転検出部材1の検出結果と、走行車体3の前側に設ける前輪5,5の操向旋回を検出する操向検出部材6の検出結果によって、各植付走行条の走行距離Bと、植付走行条の端部での折返旋回距離Cを算出し、走行距離Bと折返旋回距離Cから苗植付条面積Eを算出する構成とする。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
農作業機の操作給電システム
【課題】トラクタに装着して農作業を行う作業機をトラクタから脱着する際に、操作及び給電のためのハーネスの取り付け、取り外しが不要となる農作業機の操作給電システムを提供することを目的とする。
【解決手段】トラクタ1に装着して農作業を行いトラクタ1と脱着可能な作業機2と、トラクタ1側に設置される送信部16と、作業機2に設置される受信部22とを有し、操作部10からの操作情報を、送信部16と受信部22の間で無線送信して作業機2側に送信し、トラクタ1に有する電源11からの電力を、送信部16と受信部22の間でワイヤレスで電力伝送して作業機2側へ送る。
(もっと読む)
耕深情報取得装置及びトラクタ
【課題】ロータリ作業機の傾き量を加味して、耕耘深度に関する情報を精度良く取得する。
【解決手段】揺動レーキ66、スプロケット78a,78b及びローラチェーン80が地面からの鉛直方向高さ位置の変化に応じて回転軸76aを回転し、ポテンショメータ74が、回転軸76aの回転量に関する情報を検出し、振り子部材72が、ロータリ作業機の地面に対する姿勢変化に関わらず、ポテンショメータ74の鉛直方向に対する姿勢を維持する。これにより、ポテンショメータで検出される回転軸の回転量に関する情報に、高さ位置の変化分のみならず、ロータリ作業機の地面に対する傾き量分も含めることができる。
(もっと読む)
作業車両
【課題】オペレータが作業中に昇降制御や姿勢制御が確実に行われていることを確認できるようにすると共に、昇降制御や姿勢制御における感度調節のための参考情報を容易に得られるようにする。
【解決手段】昇降制御、或いは姿勢制御を行うアクチュエータ24,32に対して伸張指令が出されているか、縮小指令が出されているか、又は制御不能な状態にあるか否か等を、座席に座ったオペレータが目視可能なセンターピラー9bに設ける表示ユニット57を介してオペレータに表示する。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、タッチスクリーンであるタッチパネル部41に表示された操作表示画面上の操作スイッチ表示に触れて操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチ表示の操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作表示画面は、作業機の機種毎に変更して、異なる作業機の操作を可能とする。
(もっと読む)
農作業機の無線操作システム
【課題】トラクタに装着して農作業を行う作業機が有する出力機器を携帯電話により操作可能な農作業機の無線操作システムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、作業機3は、作業機3のための出力機器40と、携帯電話2からの無線操作信号を受信する受信部11と、受信した操作信号に基づき出力機器40を制御する制御部12とを有し、携帯電話2は、携帯電話2が有するボタン30により出力機器40の操作が可能であり、ボタン30による操作方法は、作業機3の機種に合わせて変更可能であることにより上記課題を解決する。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のための設定等が携帯電話を利用することで、より簡単に行える農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、携帯電話2は、携帯電話2のボタンを利用して作業機3のための設定を行う設定機能と、設定機能による設定情報を送信する送信機能とを有し、作業機3は、作業機3に設けられた出力機器と、携帯電話2から設定情報を受信する受信部と、出力機器の操作を行う操作表示部70と、受信部が受信した設定情報と操作表示部70からの操作信号に基づき出力機器を制御する制御部5とを有する。
(もっと読む)
対地作業部付き作業車両
【課題】手動昇降用のポジションレバーおよび自動昇降用の操作パネルに起因する対地作業部の予期せぬ昇降動作を回避して安全な昇降制御を可能とする対地作業部付き作業車両を提供する。
【解決手段】対地作業部付き作業車両は、手動昇降用のポジションレバー(21a)と自動昇降用の操作パネル(22)のそれぞれの指示に沿って対地作業部(41)の保持高さを昇降制御する作業機制御部(C1)と、車両起動当初における対地作業部(41)の昇降制御を規制するセフティ機構と、このセフティ機構による規制をポジションレバー(21a)の所定の予備操作によって解除する解除手段とを備えて構成され、上記作業機制御部(C1)は、車両起動時に操作パネル(22)の信号の異常があった場合に、ポジションレバー(21a)の指示に沿って対地作業部(41)の保持高さを昇降制御する制御処理を備えたものである。
(もっと読む)
作業車両搭載用制御装置
【課題】作業車両1搭載用制御装置において、コントローラ210側の端子とコネクタ296側の端子との間で酸化皮膜が形成され、接触抵抗が増加し始めた異常初期の段階を把握できるようにする。
【解決手段】制御手段210,213,281,282には、各入出力系機器と制御手段210,213,281,282との接続部Jnにおける接触抵抗rnの変化を代替的に検出するための代替検出回路300,400を備える。制御手段210,213,281,282は、代替検出回路300,400の出力電圧V2と、制御手段210,213,281,282に予め記憶された規定電圧V0との比較結果に基づいて、接続部Jnの接触抵抗rnの異常初期を検出するように構成する。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降されるように構成した場合、作業装置が下降されるタイミングのばらつきを抑える。
【解決手段】機体の旋回が開始されてから前輪1の操向角度を検出する角度センサー31の検出値が操向限度B側から設定角度A2に達すると、又は機体の旋回が開始されてからの機体の走行距離を計測する距離センサー27の計測値が設定距離に達すると、又は機体の旋回が開始されてからの時間の経過を計測するタイマーの計測値が設定時間に達すると、上昇状態の作業装置が地面まで自動的に下降されるように構成する。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】圃場面の状況や刈取対象穀稈の植立状態等の作業状況の違いに応じて適切な刈取昇降制御を行うことにより、良好な刈取作業を行うことが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】刈取部における刈幅方向の異なる箇所に配備された複数の接地式の対地高さ検出手段及び目標対地高さ設定手段の情報に基づいて昇降操作手段を制御する刈取昇降制御を実行する制御手段が、手動操作式の制御モード切換指令手段の指令に基づいて、2個の対地高さ検出手段のいずれかが目標対地高さよりも低い値を検出すると刈取部を上昇させる少数検出時上昇処理モードと、全ての対地高さ検出手段が目標対地高さよりも低い値を検出すると刈取部を上昇させる多数検出時上昇処理モードとを切り換える。
(もっと読む)
水田作業機
【課題】 水田作業装置及び対地作業装置を備えた水田作業機において、対地作業装置の作業性を向上させる。
【解決手段】 対地作業装置53をアクチュエータ56により昇降駆動自在に支持する。人為的に操作自在な人為操作具を備える。対地作業装置53が田面Gから上方の上方位置に位置する上昇状態、及び対地作業装置53た田面Gに接地可能な下方位置に位置する下降状態を、人為操作具により設定可能に構成する。人為操作具により下降状態が設定された状態で、非作業状態であると対地作業装置53が上方位置に位置するようにアクチュエータ56を作動させ、作業状態であると対地作業装置53が下方位置に位置するようにアクチュエータ56を作動させる。
(もっと読む)
リモコン操作装置
【課題】煩わしい付け換え作業をすることなく、複数種の農作業機に対して共通に使用できるリモコン操作装置を提供する。
【解決手段】リモコン操作装置1は、操作スイッチ部5を有する装置本体4を備える。装置本体4のシート被取付部6には、可撓性のシート体8を固着する。代掻機に対応するもので操作スイッチ部5の内容を表示する第1スイッチ内容表示11を装置本体4に付ける。畦塗り機に対応するもので操作スイッチ部5の内容を表示する第2スイッチ内容表示をシート体8に付ける。
(もっと読む)
1 - 20 / 45
[ Back to top ]