
Fターム[2F063PA10]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定環境 (80) | 特定されたその他のもの (22)
Fターム[2F063PA10]に分類される特許
1 - 20 / 22
地中障害物磁気探査方法

【課題】シールド掘進機による掘削前に、該シールド掘進機の進路における地中障害物の有無を、構造簡単且つ低コストで探査する。
【解決手段】検知可能半径rの磁気センサーを用い、シールド掘進機のシールド筒体内から、該シールド掘進機の進行方向の地盤に長尺な棒を挿入可能な探査孔を2以上の複数箇所に形成し、且つ、前記複数の探査孔を、それぞれ少なくとも1つの他の探査孔との距離Rが、r<R<2rを満たすように形成し、1つの前記探査孔に、先端に前記磁気センサーを取り付けた長尺な探査棒を挿入して行う先の磁気探査工程と、前記先の磁気探査工程の後に、前記探査棒を、先の磁気探査工程を行った探査孔から距離Rの位置の地盤に形成された他の探査孔に挿入して行う後の磁気探査工程とを行い、前記先の磁気探査工程と後の磁気探査工程の結果から、前記地中障害物の位置を判断する位置検知工程を有する地中障害物磁気探査方法。
(もっと読む)
タイヤ摩耗検出装置

【課題】タイヤの摩耗検出についての信頼性に優れ、しかも構成が簡単で且つ低コストのタイヤ摩耗検出装置を提供すること。
【解決手段】タイヤ摩耗検出装置は、タイヤ6のトレッド部に埋設される摩耗検出器2と、ホイール5に設けられるセンサユニット3と、車体に設置される受信機ユニット4とを備える。摩耗検出器2は、圧電素子と、同圧電素子で発生した電圧信号から電波信号を生成する共振回路とを有する。センサユニット3は、タイヤ6の内部空気圧を示す圧力データ信号を無線送信するとともに、受信した電波信号に基づきタイヤ6の摩耗状態を示す摩耗データ信号を生成して同摩耗データ信号を無線送信する。受信機ユニット4は、センサユニット3から圧力データ信号及び摩耗データ信号を受信する。
(もっと読む)
真空用接触センサ
【課題】構成簡易ながら検知範囲を広く設定し得る上に死角が少なく、かつ接近感知部を軽量とすることが可能な真空用接触センサを得る。
【解決手段】接近感知部10は、互いに接触または近接すると電気的に導通するように構成された可撓性を有する第1および第2の導電性薄板11,12を、内外方向に互いに離間した状態でアーチ状に湾曲形成してなるものであり、マニピュレータ3の先端表面部の全域を覆うように配置されている。マニピュレータ3が他物体と衝突する前に接近感知部10が他物体に当接して変形し、第1および第2の導電性薄板11,12が互いに接触または近接して電気的に導通したことを導通検出回路部20が検出することにより、マニピュレータ3が他物体と接近したことを検知する。
(もっと読む)
センサ、液膜測定装置
【課題】リアルタイムに液膜等の検出対象の厚さを測定可能とすると共に、その熱輸送量の測定を可能とするセンサ、液膜測定装置を提供する。
【解決手段】本実施の形態に係る第一のセンサ11Aは、筒状の本体12と、この本体12内に隙間を持って設けられる一対の電極13a、13bと、本体12と電極13a、13bとの間に充填された絶縁部18と、本体12内に設けられた熱電対19a〜19cとを有する。これにより、流体の液膜Lの膜厚を測定すると共に、測定された液膜Lの膜厚に応じた温度分布を測定し、熱流束を測定することができ、液膜Lの厚さに応じた熱輸送量を確認することが可能となる。
(もっと読む)
アクチュエータ及びアクチュエータのセンサ特性補正方法
【課題】アクチュエータにセンサを取り付ける場合に、組み付け誤差や個々のアクチュエータのメカニカル特性の差をより理想的なセンサ特性として補正可能でアクチュエータの出力精度を向上可能なアクチュエータ及びアクチュエータのセンサ特性補正方法を提供する。
【解決手段】このアクチュエータ100は、センサ113が搭載されており、センサはアクチュエータへの取り付け後にセンサ特性の書き換えが可能である。
(もっと読む)
マルチセンサ間隙プローブ
【課題】ブレード先端間隙を測定する方法及び能動間隙制御の方法を提供する。
【解決手段】縦方向及び横方向に配置した第1及び第2のセンサ2、3を備えたマルチセンサ間隙プローブ1は、センサと縦方向に配置した回転ロータ30との間の第1及び第2の距離D1、D2を測定するように作動する。センサは、半径方向外側タービンブレード先端82とブレード先端を囲む環状ステータシュラウド72との間のブレード先端間隙を測定するように作動する。ブレード先端は、スキーラ先端とすることができ、センサは、センサとスキーラ先端壁129の頂部137及びスキーラ先端の空洞内の外向きに向いた壁131との間の距離を測定するように作動可能である。プローブは、制御装置に作動可能に接続して第1及び第2の距離を示す信号を送信して、能動間隙制御に使用する空気弁を制御する。プローブの2つ又はそれ以上を使用して、ロータ中心線オフセットを判定する。
(もっと読む)
状態検出装置およびレーザ加工装置
【課題】レーザ加工ノズルとワークの間の状態、例えば、ギャップ長やプラズマなどを精度良く検出できる状態検出装置などを提供する。
【解決手段】状態検出装置1は、レーザ加工ノズルに設けられた測定電極とワークWの間に参照信号を供給する信号発生回路10と、測定電極とワークWの間の状態に応じて変化する電気信号を測定するバッファ回路20およびA/Dコンバータ21と、環境温度を検出する温度検出回路30と、電気信号の測定データおよび検出した環境温度に基づいて、検出対象である状態、例えば、ギャップ長やプラズマなどを演算するための演算回路40などで構成される。
(もっと読む)
シフトレバー装置用シフトポジション検出装置
【課題】二部材の摺動面間に対する異物の噛み込みに起因する二部材間の摺動性の低下を防止する。
【解決手段】シフトポジション検出装置は、シフトレバー装置におけるシフトレバーのシフトポジションを電気的に検出する。シフトレバーの操作に基づいて相対的に摺動し合う摺動面63a,66aを有する二部材53,54を備える。二部材53,54のうちの少なくとも一方の部材53の摺動面63aに、その二部材53,54の摺動面63a,66a間に入り込んだ異物を逃がすための条溝(異物逃がし部)80が設けられる。条溝80が重力方向に延びている。
(もっと読む)
内視鏡挿入形状解析システム
【課題】内視鏡の挿入部により形成されるループ形状を従来に比べて高精度に検出可能な内視鏡挿入形状解析システムを提供する。
【解決手段】本発明の内視鏡挿入形状解析システムは、被検体内に挿入された内視鏡の挿入部における複数の箇所の座標値を取得する挿入状態取得部と、前記複数の箇所の座標値に基づき、前記被検体内に挿入された前記挿入部のうち、少なくとも一部の挿入形状を検出する挿入形状検出部と、前記所定の複数の箇所の座標値及び前記挿入形状に応じて複数の座標平面を設定する座標平面設定部と、前記挿入形状を前記複数の座標平面各々に投影する挿入形状投影部と、前記複数の座標平面各々に投影された前記挿入形状に所定の形状が存在するか否かを判定する挿入形状判定部と、を有することを特徴とする。
(もっと読む)
破片検出センサ
【課題】 液体中に混入した破片を、その破片の材料が金属・非金属,磁性・非磁性,導電性・非導電性等のいずれの材料特性であるかを問わずに検出できる破片検出センサを提供する。
【解決手段】 この破片検出センサは、液体中に混入する破片を検出するセンサである。2つの対面する平板5,7と、これら2つの平板5,7のうち少なくとも一つの平板7を対面方向に動かして前記2つの平板5,7に破片を挟み込ませる平板移動機構9と、測定・判定手段16とを備える。測定・判定手段16は、前記2つの平板5,7間のギャップを測定することで、前記破片の有無、大きさ、または蓄積量を検出する。前記2つの平板のうち少なくとも1つの平板には絶縁層7aを設ける。
(もっと読む)
雨水貯留槽及び雨水貯留槽における遮水シートの損傷位置検出方法
【課題】雨水貯留槽自体の建設コストの増加を抑制しつつ、遮水シートにおける損傷の有無及び位置を簡単に検出する。
【解決手段】遮水シート20を介して地中に埋設された雨水貯留槽10において、遮水シート20の外側に面電極38を設置するとともに、遮水シート20の内側に雨水を介して通電用電極134と複数の測定電極132とを設置し、通電用電極134と面電極132との間に交流電流を印加して、複数箇所で交流電流と測定電極132,132間の電位差との位相差を測定し、この位相差の変化を調べて遮水シート20の損傷位置を特定する。
(もっと読む)
地中位置検出装置
【課題】ボーリング等による地中掘削時にリアルタイムで精度よく地中の掘削先端位置を把握できる地中位置検出装置を提供する。
【解決手段】掘削機の掘削先端部に設置される発信器1の1次励磁コイル2から発信された磁気信号によって、受信器11の3台の3軸検出コイル12、13、14のそれぞれのX軸コイル、Y軸コイル、Z軸コイルに誘起電圧が誘起され、この誘起電圧に基づいて制御装置18が発信器1(掘削先端位置)を示す位置データを算出して表示装置17に表示するとともに、発信器1の温度センサ3、ピッチ角度センサ4、ロール角度センサ5のセンサ信号をセンサ用アンテナ15が受信し、制御装置18が検知温度、検知ピッチ角度、検知ロール角度を算出して表示装置17に表示する。
(もっと読む)
埋設金属管の被覆損傷位置検出方法および埋設金属管の被覆損傷位置検出装置
【課題】調査対象である金属管に発生した被覆損傷部位の位置を正確に知ることが可能な,埋設金属管の被覆損傷位置検出方法および埋設金属管の被覆損傷位置検出装置を提供する。
【解決手段】本発明によれば,外面に防食被覆が施されて地中に埋設された金属管に交流信号電流を流し,金属管の直上の地表面における電位差を検出電極により検出し,電位差から前記交流信号電流と同一の周波数成分の信号を抽出して,金属管の被覆損傷部が作り出す地表面電位を検出することで,被覆損傷部の位置を検出する埋設金属管の被覆損傷位置検出方法および被覆損傷位置検出装置であって,金属管に誘導起電力発生手段を設け,前記交流信号電流に対応する周波数の電流を前記誘導起電力発生手段に流すことにより前記誘導起電力を前記金属管に発生させることを特徴とする被覆損傷位置検出方法および被覆損傷位置検出装置を提供することができる。
(もっと読む)
高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システム
【課題】振幅に加え位相も計測対象として位置精度を向上させる高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システムを提供する。
【解決手段】励磁コイルと、この励磁コイルと対向する複数の検出コイルと、励磁コイルと検出コイルとの間に配置されるLC共振型磁気マーカと、励磁コイルはLC共振型磁気マーカの共振周波数に同調させた交流磁界を発生させ、LC共振型磁気マーカからの誘導磁界を複数の検出コイルの各検出コイルで計測する手段と、LC共振型磁気マーカをセットした状態での検出コイルによる第1の誘起電圧を計測する手段と、LC共振型磁気マーカをセットしない状態での検出コイルによる第2の誘起電圧を計測する手段と、第1の誘起電圧と第2の誘起電圧の位相差θを求める手段と、この位相差に基づいてLC共振型磁気マーカの寄与電圧を求める手段とを具備する。
(もっと読む)
位置検知システム
【課題】光学的に遮蔽された空間を移動する移動体の位置も電磁気を利用して容易に検知する。
【解決手段】互いに直交する励磁コイル13,14を有し、これらの励磁コイル13,14に位相が90°ずれた励磁信号が入力される回転磁界プローブ11と、回転磁界プローブ11と離間して位置され、励磁コイル13,14で発生した回転磁界によって起電力が発生する検出コイル20とを備える。回転磁気プローブ11は、検出コイル20に対して移動するトンネル掘削機2の先導体3に取り付けられ、検出コイル20は地表4に配置される。検出コイル20は、回転磁界によって起電力が発生し、これに応じた位置信号を出力する。
(もっと読む)
電界検出方法、装置及び電界検出方法のプログラム並びに移動体位置等推定検出方法、装置及び移動体位置等推定検出方法のプログラム
【課題】海中等において、自然に発生する(浮遊)ノイズの影響に対処し、所望の物体、事象等に基づいて生じる電界を高精度に検出できる方法等を提供する。
【解決手段】電界を3軸方向の各成分で検知する電界検知器1と、磁界を3軸方向の各成分で検知する磁界検知器2と、海水の速度を3軸方向の各成分で計測する潮流計3と、各成分で検知した地磁気に基づく磁束密度及び海水の速度に基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定器6と、電界浮遊ノイズデータにより、電界に基づくデータを補正する電界信号データ補正部9aとを備えている。
(もっと読む)
媒体内に閉じ込められた対象物の位置探査用測定方法及び測定装置
本発明は、少なくとも1つの容量性高周波センサ(60)を用いて、第1の高周波検出信号を形成し、該第1の高周波検出信号は、検査すべき前記媒体に作用を及ぼし、従って、第1の高周波検出信号の測定及び評価によって、殊に、容量性のセンサ装置(60)のインピーダンス測定によって、媒体内に閉じ込められた対象物についての情報を得ることができる、媒体内に閉じ込められた対象物の位置探査用測定方法に関する。
本発明によると、媒体内に閉じ込められた対象物についての情報を得るために、少なくとも1つの別の第2の検出信号を評価する。
更に、本発明は、本発明の方法による測定装置(62)に関する。 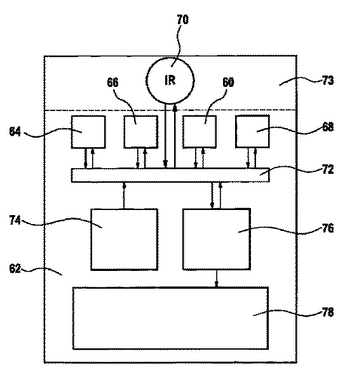 (もっと読む)
(もっと読む)
道路の融雪方法およびその方法に使用する作業車両
【課題】 高速道路等の道路上に描かれている白線等のラインを速やかに露呈させることが可能な、道路の融雪方法および該方法の実施に使用する作業車両を提供することを目的とする。
【解決手段】 融雪設備を備えた作業車両1が道路上を走行することによって路面に描かれたライン上の雪を融雪することによって該ラインを露呈させる道路の融雪方法であり、前記ライン50,51にマーカーを付すとともに、該作業車両1に、該マーカーを検出するマーカー検知装置(検知センサー27等)を配置するとともに、該作業車両1に前記マーカー検知装置からの信号に基づいてマーカーの位置を検知し、その検知した位置に対して所定位置に前記融雪設備の噴射ノズル23を移動又は対向させるよう制御する制御装置26を配置して、該マーカーにより導かれる前記ライン50を、作業車両1の噴射ノズル23から噴射する融雪液により融雪する。
(もっと読む)
磁気センサの位置計測方法
【課題】余分の格別な機能手段を用いることなく、低コストで精度良く、磁気センサの位置を計測し得る磁気センサの位置計測方法を提供する。
【解決手段】測定の都度、複数の磁気センサMD1,MD2、・・・、MDNを海中の所定領域2に展開配置する可搬型磁気測定装置において、磁気マーカーMMを移動艦艇Sの特定部位例えば船首STに固定し、移動艦艇Sが磁気センサMD1,MD2、・・・、MDNの配置領域2を移動し、磁気マーカーMMの発生磁界を磁気センサMD1,MD2、・・・、MDNで検出処理し、その検出磁気から各磁気センサの位置及び被測定艦艇と各自磁気センサの相対位置を求める。
(もっと読む)
マルチスケール定位方法
キャプチャ範囲および精度と解像度を固定した定位システムを用いて位置測定がされることが多い。キャプチャ範囲を固定すると、精度と解像度が低くなることが多い。本発明によると、最初にキャプチャ範囲を大きくして、精度と解像度は低くしておく。この大きなキャプチャ範囲内でターゲットエリアを特定し標的とする。このように特定しておいて、キャプチャ範囲を反復的に狭くし、リージョンオブインタレストを中心にする。こうすることにより、精度と解像度を上げることができる。  (もっと読む)
(もっと読む)
1 - 20 / 22
[ Back to top ]