
Fターム[2F077CC08]の内容
感知要素の出力の伝達及び変換 (32,270) | 変換器の形式 (2,031) | 複数の変換器の組み合わせ又は切換 (457)
Fターム[2F077CC08]の下位に属するFターム
手段が異なる変換器の組み合わせ (45)
インクリメンタル型とアプソリュート型 (99)
Fターム[2F077CC08]に分類される特許
1 - 20 / 313
検出装置および光学装置
エンコーダ搭載機器およびエンコーダ装置
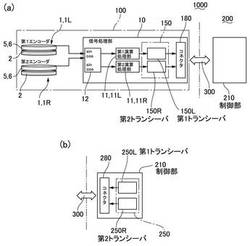
【課題】簡素な回路構成で、複数のエンコーダの検出結果を伝送することのできるエンコーダ搭載機器、およびエンコーダ装置を提供すること。
【解決手段】エンコーダ装置100およびエンコーダ搭載機器1000では、エンコーダ装置100側および制御部210側に同期式の半2重シリアル通信用のインターフェース機器150、250を設け、制御部210は、複数の演算処理部11での演算結果が各々送信されるタイミングを規定する指令信号を異なるタイミングで送信する一方、エンコーダ装置100は、指令信号に対応するタイミングで複数の演算処理部11での演算結果、および複数の演算処理部11での演算結果が出力されるタイミングに対応する同期信号CLKの各々をシリアル信号として出力する。
(もっと読む)
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法

【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
角度検出器の自律校正方法、角度検出器、円周目盛校正装置および角度検出器の校正装置
【課題】逐次2点法を用いて1回転の各角度位置において目盛誤差を精度良く算出可能な角度検出器の自律校正方法を提案すること。
【解決手段】角度検出器の自律校正方法は、第1目盛読取ヘッド11と第2目盛読取ヘッド12を、1回転を整数等分せず、且つ、複数回転Nを整数M等分する角度間隔αで配置し、目盛円板がN回転する間における第1、第2目盛読取ヘッド11、12の読みを、予め定めたデータサンプリング間隔でデータ読取装置13に取り込む。データ読取装置13では、第1、第2目盛読取ヘッド11、12の読みの差から、データサンプリング間隔で得られる、目盛円板4、5の角度目盛誤差に関する逐次2点法によるデータを生成し、複数回転N分のデータの平均がゼロになることを利用して、データを合成することで、目盛円板4、5の目盛誤差(校正値)をデータサンプリング間隔で求める。
(もっと読む)
回転角検出装置、及びトルクセンサ
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
変位検出装置、目盛の校正方法及び目盛の校正プログラム
【課題】容易且つ安価に構成でき、高精度な目盛の測定誤差の校正を可能とする。
【解決手段】光電式エンコーダ100は、スケール10、検出ユニット20、演算部30を有する。検出ユニット20は、少なくとも3つの検出部21〜23を有する。各検出部は、第1検出部21及び第2検出部22間の測定点の間隔が、物理的に配置可能な最小間隔dとなるように配置され、第2検出部22及び第3検出部23間の測定点の間隔が、最小間隔dよりも大きな間隔となるように配置される。第1検出部21の測定点の出力を1ステップ前の他の検出部の測定点に合わせるように制御しつつ検出ユニット20をステップさせてサンプリングを行う。各検出部の測定点の間隔がすべてd以上となるにもかかわらず、d以下のサンプリング間隔で測定誤差を算出し、自律校正曲線を得てスケールの位置情報を補正することができる。
(もっと読む)
非接触型磁気線形位置センサー
【課題】本発明は、線形位置センサーなどの磁気位置センサーに関し、より詳細には磁石の位置によって変化する信号を生成するように構成された複数の磁石を有するようなセンサーに関する。
【解決手段】位置センサーにおいて、2つの磁場センサーが検知される移動に平行な線に沿って配置される。2つの磁石は、それらの配置が、センサーの出力の間の差の線形または概ね線形の関数であるように、互いに磁場を生成する角度で配置される。
(もっと読む)
磁気センサ、磁気エンコーダ、磁気エンコーダモジュール、レンズ鏡筒
【課題】より高精度の磁界検出を可能とする磁気エンコーダを提供する。
【解決手段】この磁気エンコーダは、長手方向において所定のピッチで着磁された帯状の磁気メディアと、その磁気メディアの表面上を長手方向に沿って摺動しつつ、磁気メディアからの磁界を検出する磁気センサ1と、磁気センサ1を支持し、磁気センサ1を磁気メディアの表面に付勢するサスペンションとを備える。磁気メディアは、例えば円筒状の回転体の外面に、その長手方向が回転体の回転方向と一致するように取り付けられている。磁気センサ1は、基体21上に設けられた磁気抵抗効果素子22と、それを覆う第2および第3の絶縁層Z2,Z3とを有する。磁気メディアと対向する対向面1Sは、磁気メディアの長手方向に沿った断面において、磁気抵抗効果素子22の配置された中央領域WR1が最も突出した形状を有する。
(もっと読む)
センサユニットおよび変位検出装置
【課題】製造コストを低減でき、耐久性を向上できるセンサユニットを提供する。
【解決手段】センサユニット10は、対象物に取り付けられる2つの部材であって、1つの回動軸41に対し回動可能に連結された2つの部材11・12と、対象物の変位に応じて変化する、2つの部材11・12がなす角度を検出する角度センサ13とを備える。
(もっと読む)
変位検出装置、車両用操舵装置及びモータ
【課題】検出精度を低下させることなく、装置全体としての回路規模をより縮小することができる変位検出装置、車両用操舵装置及びモータ。
【解決手段】モータ回転角センサ16は、複数のホール素子HA〜HCと、これら複数のホール素子HA〜HCを動作させるための電力供給をそれぞれ遮断可能な複数のスイッチSWA〜SWCとを備える。
(もっと読む)
ポジションセンサ
【課題】小型化を図ることが可能なポジションセンサを提供すること。
【解決手段】ポジションセンサは、磁束を発生する磁石10及びその磁石10に対向して配置され同磁石10による磁束を検出するホールIC21〜23を備える。磁石10は、シフトレバーの操作に伴い、所定の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が比例関係となる着磁態様を有する。シフトレバーの操作に伴い、磁石10が各ホールIC21〜23の設けられる直線に対し交差するかたちで直線運動されると、両直線のなす角度毎に、各ホールIC21〜23による検出信号の出力差が一義的に決まる。
(もっと読む)
ポジションセンサ
【課題】小型化を図ることが可能なポジションセンサを提供すること。
【解決手段】ポジションセンサは、磁束を発生する磁石10及びその磁石10に対向して配置され同磁石10による磁束を検出するホールIC21〜23を備える。磁石10は、第1の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が比例関係となる第1の着磁領域10Aを有する。また、磁石10は、第2の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が上記比例関係とは傾き正負逆の比例関係となる第2の着磁領域10Bを有する。各ホールIC21〜23による検出電圧は、シフトレバーが第1の直線上の操作ポジションにある場合と、シフトレバーが第2の直線上の操作ポジションにある場合とで、大小関係が逆になる。
(もっと読む)
回転検出器および回転検出器における回転子の製造方法
【課題】機械加工により効率よく製造できる回転子を含む回転検出器を提供する。
【解決手段】回転検出器の回転子(1b)は、1つまたは複数の段を有する第一円筒部分(10)と、1つまたは複数の段を有していて第一円筒部分に同軸で軸方向に偏倚して配置された第二円筒部分(20)とを含んでおり、第二円筒部分は、第一円筒部分よりも周方向の幅が狭い第一部分周面(21)と、第一部分周面の半径よりも小さい半径を有する第二部分周面(22)とを含んでおり、第一円筒部分のそれぞれの段に形成された複数の歯部(15)を含む第一被検出部と、第一被検出部の歯部と同位相で且つ同一の歯型寸法緒元を有していて、第二円筒部分の第一部分周面に形成された少なくとも一つの歯部(25)を含む第二被検出部とを具備し、第二円筒部分の少なくとも一つの歯部と、該少なくとも一つの歯部に対応する第一円筒部分の歯部は機械加工により一度に形成されるようにした。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】検出精度を向上させ、高精度を有するエンコーダを提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
エンコーダ装置及びエンコーダ装置の回転情報検出方法
【課題】外部バッテリを用いずに、多回転情報を得ることができるエンコーダシステム及び信号処理方法を提供すること。
【解決手段】所定の回転軸を中心として回転する回転部と、当該回転部の第一回転情報を検出する第一検出部と、当該第一検出部とは別に回転部の第二回転情報を検出する第二検出部と、第一検出部又は第二検出部における検出結果の異常の有無を検出する制御部とを備える。
(もっと読む)
位置検出装置、及び駆動装置
【課題】被駆動体の位置を高精度に検出する。
【解決手段】位置検出装置は、変調した駆動信号を生成する変調部と、変調部によって生成された駆動信号と被駆動体の位置とに応じた検出信号を出力する検出素子を有し、変調された出力信号を検出信号に基づいて出力する検出部と、検出部から出力された出力信号を周波数逓倍した逓倍信号を生成する信号逓倍部と、信号逓倍部によって生成された逓倍信号に基づいて、被駆動体の位置を検出する位置検出部と、を備える。
(もっと読む)
目盛誤差算出装置、目盛誤差校正装置、及び目盛誤差算出方法
【課題】検出器の数を最小限にとどめながら、精度の高い目盛誤差を算出できる目盛誤差算出装置を提供する。
【解決手段】目盛誤差算出装置4は、回転軸22に支持された目盛盤2、及び目盛盤2に配設された4つの検出器3とを備えた目盛誤差校正装置1に用いられる。この目盛誤差算出装置4は、4つの検出器3で検出された各検出値に所定の係数をそれぞれ掛けて線形和を演算する検出値合成手段41と、検出値合成手段41にて演算された線形和のフーリエ成分に基づいて、目盛誤差のフーリエ成分を同定するフーリエ成分同定手段42とを備える。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
回転型センサ
【課題】出力相互誤差が小さく、出力精度の良い2出力回転型センサを提供するものである。
【解決手段】回転型センサは、抵抗体パターンと導電体パターンとが設けられた絶縁基板と、摺動子と、摺動子を保持し回転可能に配置された回転基板とを有し、回転基板の回転角に応じた出力電圧を出力する2出力回転型センサにおいて、抵抗体パターンおよび導電体パターンは、2つの同心円の円弧に沿って絶縁基板に形成され、内側の同心円の一方側の半円上に形成された第1の抵抗体パターンと外側の同心円の一方側半円上に形成された第2の抵抗体パターンと内側の同心円の他方側の半円上に形成された第1の導電体パターンと外側の同心円の一方側の半円半円上に形成された第2の導電体パターンとを備え、第1の抵抗体パターンの一方端は第1の入力端子に接続され、第2の抵抗体パターンの一方端は第2の入力端子に接続され、第1の抵抗体パターンの他方端と第2の抵抗体パターンの他方端とはグランド端子に接続されている。
(もっと読む)
位置検出装置
【課題】本発明は、広い区間において位置検出が可能で、さらに簡単な構成でありながら、広い温度範囲で物体の位置を正確に検出できる位置検出装置を提供することを目的とする。
【解決手段】本発明の位置検出装置は、第1、第2の磁気検出素子を有する磁気検出部21と、磁石51とを備え、前記第1の磁気検出素子の出力と前記第2の磁気検出素子の出力との比から、磁束密度がX軸となす角度θを求めることによって、前記磁石のX軸方向の相対的な移動距離を検出したものである。
(もっと読む)
1 - 20 / 313
[ Back to top ]