
Fターム[2F077DD03]の内容
感知要素の出力の伝達及び変換 (32,270) | 機械的手段による変換(伝達) (322) | カム、斜面又はくさびを用いるもの (10)
Fターム[2F077DD03]に分類される特許
1 - 10 / 10
位置検出装置、位置検出方法及び撮像装置
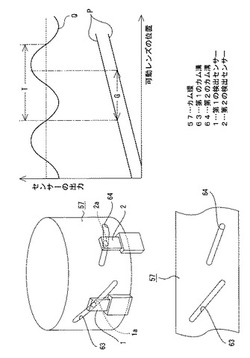
【課題】 小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行う。
【解決手段】 所定の方向へ動作され連続的に増加又は減少する信号を出力して光軸方向へ移動される可動レンズの絶対位置を検出する第1の検出センサーと、所定の方向へ動作され周期的かつ連続的に変化する信号を出力して前記可動レンズの相対位置を検出する第2の検出センサーとを設け、前記第1の検出センサーと前記第2の検出センサーを異なら動作速度で動作するようにした。
これにより、第2の検出センサーの着磁ピッチを大きくしたり、第1の検出センサーとしてリニアリティー誤差やヒステリシスの小さいものを用いる必要がなく、小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行うことができる。
(もっと読む)
回転センサ

【課題】部品の寸法公差の累積に基づく寸法誤差や組付公差の影響、長年の使用による部品の変形による影響を受けることなく第1の回転体の回転数に対応する第2の回転体の回転角度を正確に検出する。
【解決手段】被測定回転体11に取り付けられこの回転と共に回転する第1の回転体10と、第1の回転体の回転角度を所定の角度範囲ごとに検出する第1の検出手段100と、第1の回転体と機構的に連結しこれと連動して回転し、かつ第1の回転体の回転数よりも減速した回転数で回転する第2の回転体20と、第2の回転体を所定の角度範囲ごとに検出する第2の検出手段200と、を有し、第1の回転体の回転角度を検出するときに、第1の検出手段の出力値が初期値付近の値であるか、終端値付近の値であるかを判断し、第1の検出手段の出力値から第2の検出手段の出力値に判断結果に応じた所定の補正処理を行う。
(もっと読む)
回転測定装置、シート搬送装置、原稿読取装置、及び画像形成装置
【課題】回転体の軸線直交方向への変位量を測定するための専用のセンサーを設けることなく、回転体の回転量と軸線直交方向への変位量とを測定する。
【解決手段】回転体の回転軸部材と同期して自らも回転する被検部材と、これの特性を検知するセンサーとの組合せとして、被検部材が1回転する毎に、センサーが1周期分の正弦波を出力し、且つ被検部材が回転体とともに軸線直交方向に移動するのに伴って、センサーが正弦波の振幅を変化させるもの、を用いた。かかる組合せの一例としては、図1に示す被検部材510と距離センサー(511、512)との組合せを挙げることができる。このような組合せのセンサーから出力される正弦波に基づいて回転体の回転量を算出しつつ、正弦波の振幅の変化量に基づいて回転体の軸線直交方向の変位量を算出するようにした。
(もっと読む)
基準回転角度誤差補正方法及び基準回転角度誤差補正装置
【課題】安価に回転体の基準回転角度を補正することを可能とする。
【解決手段】回転体の回転に応じて、カムの傾斜部においてオンとオフとが切り替わるスイッチを用いて、前記回転体の角度を補正するための基準回転角度誤差補正方法において、前記回転体を、前記スイッチのオンとオフとが切り替わるまで、一方の方向に回転させる第1ステップと、前記回転体を、前記スイッチのオンとオフとが逆に切り替わるまで、他方の方向に回転させる第2ステップと、を備え、前記第2ステップが終了した時点での前記回転体の回転角度を基準回転角度とする。
(もっと読む)
回転角度検出装置
【課題】 回転軸方向から見て円盤磁石の外縁と内縁の間に接線方向磁気検出手段を配置する構造を採用するものであっても検出誤差を抑える。
【解決手段】 回転軸方向から見て円盤磁石2を楕円形状に設け、回転中心に真円のシャフト挿通穴5を設け、さらにセンサ支持手段4によって円盤磁石2の外縁と内縁との中間部位に接線方向磁気検出手段を常に配置することによって、楕円を描くセンサ軌跡α上における磁力線のゆがみを抑えることができ、回転角度の検出誤差を抑えることができる。また、検出誤差が抑えられることで、後段における検出誤差の補正を廃止または簡素化が可能になり、信頼性を高め、コストを抑えることができる。さらに、出荷時において各角度の補正値を測定する必要がなくなり、調整時間の短縮を図ることができ、生産性を高めることができる。
(もっと読む)
ステアリング角の絶対値を測定するための光学式ステアリング角センサ
本発明は、ステアリングホイールが複数回転する場合でもステアリング角の絶対値を定める光学式ステアリング角センサに関するものであり、ステーター、バーコードを有するローター、及び評価電子機器を備える。本発明では、ローター(1,13)は、回転数検出のためにウォーム状のトラック溝部(5)を備え、このトラック溝部(5)に対応してステーター(2)に駆動体突起(6)を備え、この駆動体突起(6)は、トラック溝部(5)に係合し、回転可能となるようにベアリング(9,15)に配置され、駆動体突起(6)とともに回転可能な磁石(8)の保持のためのホルダ(7)を備え、この駆動体突起(6)に対応して評価回路に設けられた固定状のホールセンサ(11)を有する。 (もっと読む)
磁束密度のゼロ位置通過を安定化させた位置センサ用エンコーダ
【課題】空隙変化に対し安定な位置及び/又は速度センサ用エンコーダを提供する。
【解決手段】一の小磁極Pと一の大磁極Gとの間に少なくとも一の接合面Jを有しており、大磁極Gは小磁極Pの角度幅よりも大きな角度幅を有し、各接合面Jに対応する小磁極Pと大磁極Gは反対符号の極性を有するエンコーダに関する。各接合面Jに関して、所定の符号を有する大磁極Gは、一方では、前記所定符号と同じ符号の少なくとも一の小安定極psであって、反対符号の小磁極Pに隣接し、この小磁極Pの角度幅と実質的に同一の角度幅を有する小安定極psと、他方では、小安定極psと同じ符号の少なくとも一の相補極pcであって、この相補極pc及び/又は小安定極psが、磁束密度における放射方向成分のゼロガウス位置通過を安定化するように適合された傾斜型の磁界強度を示す相補極pcとから成る。
(もっと読む)
回転角度検出装置
【課題】本体を小型化することができる回転角度検出装置を提供する。
【解決手段】ステアリングシャフト14の回転角を検出する回転角度検出装置20において、ステアリングシャフト14と共に回転する底部23と、底部23の内底面23bに固定され回転軸Oを基準として渦を巻くように形成された渦巻壁部26と、渦巻壁部26の一部と一部との間に配置され底部23が回転することにより該渦巻壁部26及び底部23に対して相対移動可能な磁性流体Mと、渦巻壁部26の径方向dの外方に配置されると共に回転軸Oに対して相対移動不能に配置されかつ磁性流体Mを吸引する磁石17と、磁性流体Mにおける回転軸Oを基準とした径方向dへの変位を検出する位置検出回路19とを備えた。
(もっと読む)
変位検出装置
【課題】スケールが検出方向以外の方向に大きく移動してしまう場合であっても、スケールに対して検出部材が傾くことなく、十分な検出信号を得ることができ、また、ガタもなく、正確にスケールを読み取ることができる変位検出装置を提供する。
【解決手段】磁気ヘッド1を支持する支持板4には、腕部4b,接続部4c,磁気ヘッド取付部4dを設ける。そして磁気ヘッド取付部4dに取り付けられた磁気ヘッド1は、接続部4cを支点として遥動することができるように設ける。さらに、加圧ばね5の加圧点5aを、接続部4cよりも+X方向にずれた位置(X方向において、固定部4aと接続部4cとの間)に配置する。
(もっと読む)
角度センサを備える検出装置
相互に回転可能な第1の部分(2)と第2の部分(3)からなる構造に対する角度センサ(1)を備える検出装置であって、回転は回転軸(5)によって定義される。第2の部分(3)と結合された前記角度センサ(1)は、第1の部分(2)とともに回転に関与する磁石装置(4)により生成される磁界(B)の、回転角(α)に依存する正弦成分と余弦成分(s,k)を検出する。360°よりも大きい角度を検出するために、相対的な回転角(αrelativ)に加えてさらに別の成分として、絶対的な回転角(αabsolut)に依存して所定の仕方で変化する磁場(B)の数値も判定され、この変化は、相対的な回転角(αrelativ)と磁界(B)の数値の論理演算によって角度表示の多義性が排除される程度の大きさである。 (もっと読む)
1 - 10 / 10
[ Back to top ]