
Fターム[3C007AS05]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 搬送、移載、物品供給、取出 (637) | 工作機械/処理装置への受け渡し (178)
Fターム[3C007AS05]に分類される特許
1 - 20 / 178
作業システム
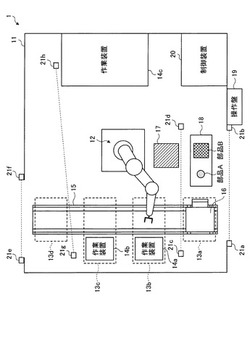
【課題】作業システムの設備コストを抑えること。
【解決手段】作業システム1は、作業対象であるワークに対して所定の作業を行うロボット12と、ワークに対する所定の作業が行われる場所である複数の作業ステーション13a〜13dとを備える。そして、ロボット12は、作業ステーション13b,13cにおいてワークに対して圧入作業やネジ締め作業といった所定の作業を行うだけでなく、作業ステーション13a〜13d間でのワークの搬送も併せて行う。
(もっと読む)
ロボットハンド及びロボット装置

【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされている。
(もっと読む)
ロボット搬送装置
【課題】搬送動作途中の停止位置から、ロボットが干渉することなく、動作開始位置へ戻ることが簡単にできるロボット搬送装置を提供する。
【解決手段】ロボット50とロボット制御装置100と搬出プログラム24aとプログラム実行手段と前進方向又は後退方向を設定する実行方向設定手段とワークの搬送状態検出手段とからなるロボット搬送装置1において、搬出プログラム24aの実行による搬送動作が停止され、停止位置からの復帰動作は、ワークの搬送状態検出手段により、搬送状態を取得し、非搬送中ならば、搬出プログラム24aの停止ステップから先頭ステップまで、後退方向に実行して搬出動作の始点に移動し、搬送中ならば、搬出プログラム24aの停止ステップから末尾ステップまで、前進方向に実行して搬送動作の終点に移動する。
(もっと読む)
ワーク搬送装置
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
ウエハ搬送ロボット
【課題】半導体ウエハを対向するチャンバ間でスムーズに移動することのできる搬送ロボットを提供する。
【解決手段】ウエハ搬送ロボット100は、2本のリンク12、13で構成されているアーム10を備える。アーム10の先端にはウエハホルダ6が備えられている。アーム10の基部に相当する駆動リンク13は筐体2に回転可能に連結されている。アーム10は、駆動リンク13の回転に伴うアーム先端の運動が直線又は曲線の軌道に制限される構造を有しているとともに、その軌道は、始点Wsと終点Weが駆動リンク13の回転中心から等距離の位置にあり、始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と前記回転中心を通る直線に対して鏡像の関係を満たしている。
(もっと読む)
基板搬送装置
【課題】2段のピンセットによる搬入出動作を同じタイミングで行い、基板搬送に係る処理時間を短縮する。
【解決手段】基台上に相対向して立設された一対の第一及び第二の昇降軸7,8と、前記第一の昇降軸に沿って昇降自在に設けられると共に、第一のピンセット15をステージに対し進退移動させる第一の進退移動手段13と、前記第一の進退移動手段を前記第一の昇降軸に沿って昇降移動させる第一の昇降手段11と、前記第二の昇降軸に沿って昇降自在に設けられると共に、第二のピンセット16をステージに対し進退移動させる第二の進退移動手段14と、前記第二の進退移動手段を前記第二の昇降軸に沿って昇降移動させる第二の昇降手段12と、前記第一及び第二の進退移動手段の駆動制御、及び前記第一及び第二の昇降手段の駆動制御を行う制御手段19とを備える。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
基板位置検出方法
【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
真空処理装置、電子部品の製造方法及び真空処理プログラム
【課題】 基板搬送用ロボットのフィンガーの変形を精度よく検出する。
【解決手段】 基板を保持可能なフィンガーを有した基板搬送用のロボット、及び、前記ロボットにより基板を搬出入させるための基板搬送口を備えた搬送チャンバと、前記基板搬送口に着脱可能に接続され、前記搬送チャンバ内部に連通する開口を有し、外部に対して密閉された内部空間を形成する筐体、及び、前記内部空間に挿入される前記フィンガーの変形を検出するための変位センサを備えたセンシングポートと、前記搬送チャンバに設けられる排気口を介して、前記搬送チャンバ及び前記筐体内部を排気する排気手段と、前記排気手段により前記搬送チャンバ及び筐体内部を減圧させた状態で、前記筐体の内部空間に挿入されたフィンガーの形状の前記変位センサによる検出結果を取得する制御手段と、を備える。
(もっと読む)
保持部材の姿勢判定装置、その方法、基板処理装置及び記憶媒体
【課題】 保持部材の姿勢に異常があるか否かを確実かつ容易に検出すること。
【解決手段】 保持部材であるフォーク3Aを前進させたときに、当該フォーク3Aがその前を通過するように、フォーク3Aの進行方向に対して側方にラインセンサ4を設ける。そして、フォーク3Aをラインセンサ4に対して進退させたときに、当該フォーク3Aの上下方向の位置と、フォーク3Aの進退方向の位置とを対応付けたデータを取得する。この取得されたデータに基づいて前記進退方向の位置に対して上下方向の位置を二次微分した値を演算し、この値に基づいて保持部材の姿勢の異常の有無を判定する。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
ロボットシステム
【課題】ワークを搬送しつつ、各工程でワークに対して作業を行うロボットシステムにおいて、設備の取り外しや追加の手間を減らす。
【解決手段】ロボットシステム20Bは、ワークWを受け取る受取り部と、ワークWを引き渡す引渡し部とを備える。システム20Bは、システム20Aの引渡し部からシステム20Bの受取り部へワークWを受け渡すロボット30Bと、受取り部から引渡し部へワークWを搬送するベルトコンベア22Bと、ワークWに対して作業を行う作業装置21Bとを備える。システム20Bは、ロボット30Bに設けられたRFIDタグ33Bと、ロボット30BがワークWを受取り部へ受け渡す際に、RFIDタグ33Bの情報を無線で読み込むリーダライタヘッド23Bと、ロボット30BがワークWを引渡し部から引き渡す際に、RFIDタグ33Bに情報を無線で書き込むリーダライタヘッド25Bと、を備える。
(もっと読む)
ロボットシステム
【課題】ワークを搬送しつつ、各工程でワークに対して作業を行うロボットシステムにおいて、設備の取り外しや追加の手間を減らす。
【解決手段】ロボットシステム20Aは、ワークWをシステム20Fから受け取るとともに、ワークWをシステム20Bへ引き渡す載置台22Aを備える。システム20Aは、システム20Aの載置台22Aからシステム20Bの載置台22BへワークWを受け渡すロボット30Aと、載置台22AにおいてワークWに対して作業を行う作業装置21Aとを備える。システム20Aは、ロボット30Aに設けられたRFIDタグ33Aと、ロボット30FがワークWを載置台22Aへ受け渡す際に、RFIDタグ33Fの情報を無線で読み込むリーダライタヘッド25Aと、ロボット30AがワークWを載置台22Aから引き渡す際に、RFIDタグ33Aに情報を無線で書き込むリーダライタヘッド25Aと、を備える。
(もっと読む)
真空処理装置
【課題】真空処理装置において、試料の位置ずれが発生した際にそのずれ量を抑制し、予期しない搬送動作の停止を防ぐ。
【解決手段】試料の搬送を行う真空搬送室において、ロボットによる前記搬送の動作中に生じるアーム上に載せられたウエハの加速度はアームの伸長の開始または収縮の終了の際の加速度が最大であって、搬送中の試料の位置ずれを検出し、そのずれ量が所定の閾値(許容値)を超えた場合に、ロボットのアームの伸長の開始または収縮の終了の際の加速度をA‘からAに低下させてずれ量が閾値を超えないようにする。
(もっと読む)
ワーク搬送装置
【課題】設置に広いスペースを必要としないコンパクトな装置であるとともに、効率的なワークの搬入搬出動作ができるワーク搬送装置を提供すること。
【解決手段】支持フレーム2と、第1軸J1まわりに回動自在に支持される第1アーム3と、第1軸J1上に配置され支持フレーム2に対して相対的に姿勢を保持可能な基準姿勢保持部材と、第1アーム3に対して第1軸J1と平行な第2軸J2まわりに回動自在に支持される第2アーム5と、第1軸J1と平行であって第2軸からの距離が略等距離である第3軸J3及び第4軸J4上にそれぞれ配置され、第2アーム5に対して第3軸J3及び第4軸J4まわりにそれぞれ回動自在に支持される第1及び第2ハンド51、52と、を備え、第1アーム3又は第2アーム5が回動した場合であっても、支持フレーム2に対する第1及び第2ハンド51、52の姿勢が保持されることを特徴とするワーク搬送装置。
(もっと読む)
基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法
【課題】 より大きな駆動源、直動ガイド能力を必要とせず、小型化が可能な基板搬送装置を提供すること。
【解決手段】 基板搬送装置は、第1駆動軸と、第1駆動軸に一端が連結されたアーム部と、基板を保持することが可能な基板保持部と、アーム部の他端と基板保持部を連結する連結部と、を有する。連結部は、アーム部に対して基板保持部を回転可能に支持する回転支持部と、回転支持部によって基板保持部が回転する回転軸の方向に、アーム部に対して基板保持部を上昇させ、または、降下移動させる移動部と、を備える。
(もっと読む)
生産システム
【課題】ワークを把持したロボットが複数の処理装置間を順次移動してワークを製品化する生産システムにおいて、ロボットと処理装置との間のワークの授受位置を自動で効率的に取得可能とし、システムのフレキシビリティの向上を図る。
【解決手段】処理装置4は、指向性のある無線の通信部41を備え、ロボット3は、処理装置4の通信部41との間で相互に通信する指向性のある無線の通信部31と、処理装置4上の所定の特徴点42を撮像して位置認識を行う画像処理部(CCDカメラ32a)と、ハンド部33と、を備え、ロボット3は、相互の通信部31,41を用いて処理装置4に対する位置関係を検出し、その検出の後に、画像処理部を用いて特徴点42を認識することにより処理装置4に対する精密な位置関係を検出し、これに基づいてワークの授受位置を取得する。2段階の位置検出により、狭いカメラの撮像範囲で精度良く効率的に位置を取得できる。
(もっと読む)
ワーク搬送装置におけるハンド着脱機構
【課題】ハンドの着脱が簡単で、耐久性に優れたワーク搬送装置におけるハンド着脱機構を提供する。
【解決手段】ロボット先端部に、ハンド装脱着用の前後スライド溝21を設けたホルダイケール20を固定し、ホルダイケール20に内蔵した流体圧シリンダの駆動で、摺動ピストンが前後スライド溝21に挿入したハンドユニット40の基端部を押圧固定するワーク搬送装置におけるハンド着脱機構であって、先端係合用のV字ブロック24と、摺動ピストンに一体化したロックピン28とを前後スライド溝21内に前後に離間して設け、ハンド基端部の挿入端側にスリット44を設けて二股状端部43を構成し、二股の付け根側上面にロックピン28の先端のすり鉢状ブロック29と係合するテーパ状係合部45を設けた。
(もっと読む)
1 - 20 / 178
[ Back to top ]