
Fターム[3C007CU06]の内容
マニピュレータ、ロボット (46,145) | 腕 (311) | 腕の中に光路、流体路を有するもの (35)
Fターム[3C007CU06]に分類される特許
1 - 20 / 35
リンク式ロボットアーム装置
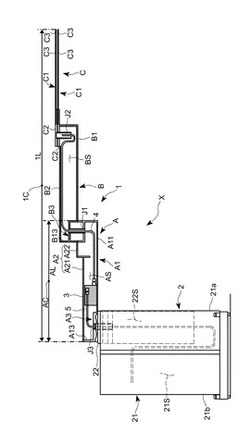
【課題】アームの制御性低下を効果的に抑制するとともに、吸着ON・OFF状態の切替応答性が向上するリンク式ロボットアーム装置を提供する。
【解決手段】アームの先端側に配置され且つ吸着用エア供給口C3を有するエンドエフェクタCによって搬送対象物を吸着保持可能なリンク式ロボットアーム装置Xとして、アーム1の内部に設けたエア管4を介して吸着用エア供給口C3に接続され、吸着用エア供給口C3に吸着用エアを供給可能な状態と、吸着用エア供給口C3への吸着用エア供給を停止する状態との間で切替可能な吸着切替ユニット3を備え、この吸着切替ユニット3を、アーム1のうちアーム長1Lの半分1Cよりもシータ軸J3に近い位置に設けた。
(もっと読む)
産業用ロボット内部の線条体の配線方法

【課題】線条体を産業用ロボット外部に露出させることなく産業用ロボット内部に配線することができ、かつメンテナンス時に線条体を容易に交換することが可能な、産業用ロボット内部の線条体の配線方法を提供する。
【解決手段】まず、基端側線条部材21の一端21aを基台11に接続し、基端側線条部材21の他端21bを、基台11から第1の収納室12を通って、第1のロボット腕13まで配線する。次に、先端側線条部材22の一端22aを、第1のロボット腕13から第2の収納室14を通って第2のロボット腕15まで配線し、さらに先端側線条部材22の一端22aを手首部16に接続する。その後、基端側線条部材21の他端21bと、先端側線条部材22の他端22bとをコネクタ23によって接続する。
(もっと読む)
医療用マニピュレータ
【課題】医療用マニピュレータの動作状態をモニタ画面上で確認可能にする。
【解決手段】医療用マニピュレータ10は、モータ40a、40b、40cを備えたアクチュエータブロック30と、アクチュエータブロック30に着脱自在でモータ40a、40b、40cの回転軸に接続されるプーリ50a、50b、50cを備える接続部15と、該接続部15から延在する連結シャフト48の先端に設けられ、ワイヤ54a、54b、54cを介してプーリ50a、50b、50cに連動する先端動作部12と、アクチュエータブロック30の接続面30aに設けられたLED103と、連結シャフト48内に設けられ、LED103の光を先端動作部12の近傍部まで導く光ファイバ49とを有する。
(もっと読む)
ワイヤ送給装置
【課題】アームを軸周りに回転させたときに、アーム内を通過しているトーチケーブルの捩れを防ぐことができるワイヤ送給装置を提供することを課題とする。
【解決手段】トーチケーブル2が上部アームR3内を軸方向に通過している溶接ロボットにおいて、トーチケーブル2内の溶接ワイヤ3を送給するワイヤ送給装置1であって、上部アームR3の軸周りに回転自在な状態で、上部アームR3の内周面に取り付けられるとともに、トーチケーブル2が取り付けられている本体部材20と、上部アームR3の軸方向と直交する軸周りに回転自在な状態で、本体部材20に取り付けられた送りローラ30と、を備え、トーチケーブル2から露出した溶接ワイヤ3が、送りローラ30の周面31に接触しており、送りローラ30が回転することで、溶接ワイヤ3が上部アームR3の軸方向に送り出されることを特徴としている。
(もっと読む)
パラレルメカニズム
【課題】 エア駆動式のエンドエフェクタにエアを給排気するためのエア配管の取り回しを改善することが可能なパラレルメカニズムを提供する。
【解決手段】 エア配管36は、バキュームパッド13のエア給排口13bとロッド10に形成された中空部10aのバキュームパッド13側の端部とを連通する第1エア配管40と、その内部に中空部10aが形成されたロッド10と、ロッド10に形成された中空部10aの第1アーム7側の端部とエアポンプ50とを連通する第2エア配管41とを備えている。よって、バキュームパッド13とエアポンプ50とは、第1エア配管40、第2アーム8を構成するロッド10の中空部10a、及び第2エア配管41を通して連通される。
(もっと読む)
多関節型ロボット
【課題】より効果的に減速装置を冷却することを目的とする。
【解決手段】多関節型ロボットは、第1モータ10により旋回駆動されるアーム3を有する。第1モータ10の出力軸10aはハーモニック減速装置からなる減速装置13を介してアーム3(第1リンク3a)に接続されている。減速装置13には、内部に冷却水の流路を有する冷却用部材14に一体に組み付けられており、この冷却用部材14に対して配管L1等を介して冷却水が供給される構成となっている。
(もっと読む)
ロボットアーム用ケーブル保持装置
【課題】 ロボットアームに応力集中が生じないようにする。
【解決手段】 所要間隔を隔てて配置した一対の円筒部材6の上端部同士、下端部同士、外周面の左右両端部同士を、それぞれ上面板7、下面板8、左右の側面板9で連結して中空構造のロボットアーム1を形成する。各円筒部材6の周壁にて上面板7と下面板8と左右の側面板9とで囲まれる内側に位置する部分の中央部にそれぞれ穿設したケーブル挿通孔10同士の間に、丸パイプ6を取り付けて、その内側にケーブル3を通して敷設する。丸パイプ6をロボットアーム1の中立面の幅方向中央位置に配することで、該丸パイプ6がロボットアーム1に作用する曲げやねじり方向応力に影響する虞を解消させる。
(もっと読む)
マニピュレータ操作システム
【課題】操作部への操作量に対する表示部における処置具先端の移動距離を調整することで、術者に対する操作の負担を抑えることができるマニピュレータ操作システムを提供すること。
【解決手段】患部を処置するマニピュレータ型の電動式の内視鏡用処置具200と、患部等の撮像画像70を撮像し、内視鏡用処置具200とは別体である撮像部17と、撮像部17で撮像された画像を表示するモニタ53aと、内視鏡用処置具200の先端部212(把持鉗子213)の配置位置を検出する検出部258dと、撮像画像70の像面歪曲情報を取得する画像処理装置52と、先端部212の配置位置と、像面歪曲情報を基に、ジョイスティック205の操作量と湾曲部211における湾曲量の比を調整する調整部258eを備える。
(もっと読む)
流体船積みおよび/または荷降ろしシステム用の直接制御、特に比例制御および/または直線的制御式装置
本発明は、海洋船積みシステム(2)用の結合器の動きと位置決めのための制御装置に関する。前記海洋船積みシステムは、ベースに固定されているライン端部を有する少なくとも1つの流体移送ラインと、目標ダクトへの接続用に適合されている結合器が設けられている可動ライン端部とを備え、前記システムは、ベースに対して少なくとも3自由度を結合器が有するように、複数の機械的接続部を更に有しており、制御装置は、それぞれが自由度においてシステムの動きを比例的に制御する少なくとも3つの比例式制御アクチュエータ(27、28、29)と、各自由度を追尾するシステムの位置センサ(30、31、32)と、結合器を動かすコマンドを入力するためのコマンド入力インタフェース(60)と、結合器の瞬間的位置を、センサから提供される情報から計算し、コマンド入力インタフェースの動きコマンド入力から、アクチュエータの組み合わされた動きが、コマンド入力インタフェースにおいてオペレータにより提供される動きコマンドに対応する結合器の動きとなるように、アクチュエータのそれぞれに与える同時制御指令を計算する計算機(41)と、を備える。  (もっと読む)
(もっと読む)
作業用ロボット
【課題】配線が絡まったりねじれたりすることを防止することができる作業用ロボットを提供する。
【解決手段】作業用ロボット10は、基端側から先端側に向かって順次設けられた複数のアーム体12〜16と、各アーム体12〜16間に介在された回動軸A1〜A6とを備えている。このうち一のアーム体13は2本のアーム部材13A、13Bからなっている。このうち一方のアーム部材13Bは金属材料からなり、他方のアーム部材13Aは中空状の囲体13Cを有している。基端側の回動軸A1から先端側の回動軸A6に向けて配線18が設けられ、この配線18は囲体13C内に配置されている。
(もっと読む)
レーザ加工ロボット
【課題】 大出力のレーザ発振器を用いて高速でかつ高精度でレーザ加工をおこなうことができ、被加工物や治具等との干渉が少ないレーザ加工ロボットを提供する。
【解決手段】 垂直多関節形ロボット1の第3軸J3により駆動されるアーム10の先端部に、第3軸J3の軸線に対して直角方向に延びる第4軸線S4とこの第4軸線に直交する第5軸線S5の回りに2つの回転自由度を有し先端に集光部24をそなえた手首部20であって、第4軸線S4に沿って入射したレーザビームを第5軸線S5上に設けた2つのベンドミラー25,26により第5軸線S5を経て集光部24へ偏向するレーザビーム伝送路を内部にそなえてなる手首部の基部20aを、取付けるとともに、手首部の基部20aに向って第4軸線S4と同軸状にレーザビームを出力するレーザ発振器30を、アーム10に搭載した。
(もっと読む)
産業用ロボットの線条体処理構造
【課題】本発明は、作業ツール及び手首が複雑な動きをした場合であっても、手首に配索される線条体の挙動を安定させることができ、線条体の接続信頼性を高めることができる産業用ロボットの線条体処理構造を提供する。
【解決手段】電磁弁ボックス12を有する前腕7と、一端に前腕7が回動自在に連結され、他端にハンド15を有する手首8〜9とを備え、ハンド15に接続するハンドケーブル20が、電磁弁ボックス12を経由して、手首8〜9に沿って配索されている産業用ロボットの線条体処理構造において、ハンドケーブル20を通す導管13が、前腕7側からハンド15側にかけて手首8〜9の内部に設けられ、導管13の一端がハンド15側で固定され、導管13の他端が前腕7内部で導管13の長手方向に摺動可能に挿入されている。
(もっと読む)
ロボット
【課題】ロボットアーム内に配設された可撓性を有するエアチューブの折れの発生を効果的に防止し、しかもそのための構成を簡単で安価に済ませる。
【解決手段】ケーブル束12は、ロボット本体のベース部から第1〜第4アームを順に通され、第4アーム内に配置される先端部分においては、エアチューブ14及びワイヤハーネス13の先端部が保護チューブ15から露出した状態となっている。エアチューブ14の露出部分を、第4アーム内において湾曲して配置し、その先端をマニホールドバルブの接続口に接続する。このとき、エアチューブ14の先端部分に、エアチューブ14の使用可能な最小曲げ半径まで折曲げても塑性変形を起こさないステンレスワイヤ28を挿入配置する。
(もっと読む)
溶接ロボットにおけるワイヤ送給装置の設置方法、溶接ロボットにおけるワイヤ送給装置の設置構造及び溶接ロボット
【課題】ワイヤ送給装置から回転アームの内部空間を介して溶接用トーチ迄に配置されるトーチケーブルの変曲点を少なくでき、或いは内部空間から通過した部位の反り上がりを可及的に少なくできて溶接への悪影響を抑制できる溶接ロボットにおけるワイヤ送給装置の設置方法、設置構造、及び溶接ロボットを提供する。
【解決手段】
溶接ロボットにおいて、ワイヤ送給装置22のワイヤ送出口24がアッパアーム14の回転軸線14aの下方に位置され、回転軸線14aに対して斜め上方に向くように、かつ、ワイヤ送出口24に接続されるトーチケーブル30が内部空間SPにおいて、回転軸線14aを下方から上方へ交差するようにワイヤ送給装置22が設置されている。
(もっと読む)
産業用ロボット
【課題】線条体の収納スペースのコンパクト化を図ることにより、アームのコンパクト化を図ることができ、これによってロボットの動作安定性を高めることができる産業用ロボットを提供する。
【解決手段】アーム17と、アーム17に回動可能に連結されている手首要素22と、手首要素22の先端側に装着されている作業ツールと、手首要素22に搭載されているモータ70と、を備え、作業ツールに接続する線条体51及びモータ70に接続するフラットケーブル110が、アーム17側から作業ツール又はモータまで手首要素22に沿って配索されている産業用ロボットにおいて、アーム17の内部に、手首要素22の回転軸方向に延在するパイプ材100が設けられ、パイプ材100の内側に作業ツールに接続する線条体51が通され、パイプ材100の外側にモータに接続するフラットケーブル110が手首要素22の回動方向で余長を有して巻回されている。
(もっと読む)
ロボット
【課題】作動軸の中空部に接続部材が挿通する構造を採りながら、クリーンルームでも使用可能なロボットを提供する。
【解決手段】中空な作動軸5と、この作動軸5を回動と軸線方向への移動とのうち少なくともいずれか一方が可能となるように支持する揺動式アーム4と、アームを支持する基台2とを備える。作動軸5の中空部に、空気配管、電力供給用あるいは通信用のケーブルのうち少なくとも一つからなる配管等104を挿通する。この配管等104における作動軸5から導出された部位にコイル状の弾性変形可能な余裕部111,112を形成する。この余裕部の一端部を作動軸5に支持させ、他端部をアーム4に支持させる。アーム4に作動軸5と余裕部111,112とを覆うカバー9を備えさせる。このカバー9の内部を基台2まで延びる通路に連通させ、この通路に配管等104を通して基台2に導いた。
(もっと読む)
ロボット等用フレーム
【課題】モータの駆動による温度上昇の影響を排除することができるアルミ合金等製のロボット等用フレームを提供することにある。
【解決手段】その第1のフレームは、アルミ合金等の押出形材からなるフレーム本体の外面へ長さ方向に沿って形成された溝部に、ヒートパイプが埋め込み状に取り付けられていることを最も主要な特徴としている。第2のフレームは、アルミ合金等の押出形材からなるフレーム本体の外面に、長さ方向に沿う多数のフィンが形成されていることを最も特徴としている。
(もっと読む)
ロボットアーム
【課題】高圧空気を駆動源とするワーク保持手段への配管が外部に露出せず、省スペース化が可能であると共に、メンテンス性を良好に保つことが可能なロボットアームを提供する。
【解決手段】軸方向に沿って所定のピッチで多数の磁極が配列されたアーム軸3と、このアーム軸3が遊嵌する貫通孔を有すると共に該アーム軸3と相まってリニアモータを構成し、印加される電気信号に応じて前記アーム軸3を軸方向へ進退させるフォーサと、前記アーム軸3の一端に設けられると共に空気圧に応じて動作するワーク保持手段4とから構成され、前記アーム軸3には前記ワーク保持手段4に対して空気圧を作用させるための流体供給孔30が軸方向に沿って貫通形成され、この流体供給孔30がワーク保持手段4の供給ポートに接続されている。
(もっと読む)
作業ツールを備えたロボット
【課題】作業ツール管理装置を備えた前腕後部が上腕の内側を通過するアーム姿勢となるときであっても、線条体または作業ツール管理装置が上腕に干渉しないようにする。
【解決手段】ロボットの線条体処理機構において、作業ツール管理装置(34)に動力、信号および材料のうちの少なくとも一つを供給する作業ツール管理装置用線条体(50)は、旋回胴(12)に取付けられた側面とは反対側に位置する上腕(14)の側面において旋回胴から上腕の長手方向に沿って案内され、前腕(18)の前面(18b)に案内され、次いで上腕が取付けられている側面とは反対側に位置する前腕の側面を通って作業ツール管理装置(34)に接続されている。さらに、作業ツール管理装置用線条体は、前腕の側面または前面に取付けられた線条体中継部(39)により中継されて作業ツール管理装置に接続されている。
(もっと読む)
線条体収容型アームを備えたロボット
【課題】線条体収容型アームを備えたロボットにおいて、ツール管理中継装置がアーム動作に及ぼす影響を低減しつつ、線条体の交換作業を円滑に遂行できるようにする。
【解決手段】ロボット10は、貫通路34を有する前腕部18と、前腕部18に関節連結される手首部20と、前腕部18の貫通路34に挿通され、手首部20に沿って敷設される線条体38と、貫通路34の近傍で前腕部18に搭載され、線条体38が接続される接続部44を有するツール管理中継装置46と、ツール管理中継装置46を、接続部44が貫通路34の開口に隣接して配置される第1位置と、接続部44が貫通路34の開口から離隔して配置される第2位置との間で、移動可能に担持する搭載機構68とを備える。搭載機構68は、ツール管理中継装置46を、第1位置で前腕部18に解除可能に固定するとともに、第2位置で前腕部18に静止可能に担持する。
(もっと読む)
1 - 20 / 35
[ Back to top ]