
Fターム[3C007CY01]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | エネルギー供給 (611)
Fターム[3C007CY01]の下位に属するFターム
給電(電気信号を含む) (203)
流体供給 (66)
関節部の配線 (156)
ケーブルを本体外面に沿わせて配置 (49)
ケーブルを本体から離隔支持するもの (44)
ケーブルを螺旋状に巻いた部分を有するもの (27)
ケーブルをU字状に折り込んだ部分を有するもの (39)
Fターム[3C007CY01]に分類される特許
1 - 20 / 27
ロボットハンド
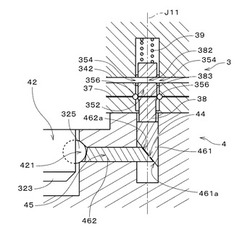
【課題】ロボットハンドにて簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断する。
【解決手段】ロボットハンドでは、ハンド本体部3と把持部を有するハンド先端部4とが着脱自在である。ハンド本体部3は、第2穴部352、第2穴部352内に設けられる摺動部38および付勢部39、把持部の駆動用の流体が流れる第2流体流路342、並びに、把持部からの信号が伝送される伝送経路37を有する。これらの流路および経路の一部は摺動部38に形成される。ハンド先端部4の非装着時には、摺動部38が付勢部39に付勢されて遮断位置に位置し、これらの流路および経路が遮断され、ハンド先端部4の装着時には、ハンド先端部4により押されて摺動部38が接続位置に位置し、これらの流路および経路が摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37が遮断される。
(もっと読む)
多関節ロボットの駆動制御方法及び多関節ロボットの配線配管保護装置

【課題】配線・配管の機能に支障を来すような大きな張力が加わった場合に有効に対処すること。
【解決手段】ロボットの多関節型アームの第1乃至第4の各アーム部に対してクランプ部によりそれぞれクランプされたケーブル21の、隣り合うクランプ部の間の箇所に、ケーブル保護装置23を適宜介設する。そして、ケーブル保護装置23のハウジング23c内においてケーブル21を、一対のコネクタ23a,23bによって接触離間可能に構成する。さらに、コネクタ23a,23bの接触離間の状態を、ケーブル21のエア配管21aの空気圧や信号線21dの電位によって検出し、コネクタ23a,23bの離間を検出した場合は、ロボットの動作を停止して、直前に通過した通過点に逆転動作させる。コネクタ23a,23bが接触状態に復帰したら、逆転動作前の動作パターンでロボットを動作させる。
(もっと読む)
多関節型ロボット
【課題】旋回移動されるアーム間に高い信頼性のもとに、しかも容易に外部配線を敷設することのできる多関節型ロボットを提供する。
【解決手段】水平多関節ロボットは、第1のアーム13を回転軸12の軸心C1を中心として回動可能に支持する基台11と、回転軸12に平行な支持軸14の軸心C2を中心として第1のアーム13に回動可能に支持される第2のアーム15とを備える。基台11には第1保持部材21が、第2のアーム15には第2保持部材25がそれぞれ固定される。そして、管形状の内部空間に外部配線が配置され、第1保持部材21に保持され軸心C1の延長上にて回転軸12に対して回動可能な基端部31aと、第2保持部材25に保持され軸心C2の延長上にて支持軸14に対して回動可能な先端部31bとを有する配線ダクト31を備える。配線ダクト31を基端部31aと先端部31bとの間で管の軸方向に沿って外周が分断される割体とする。
(もっと読む)
溶接ロボット
【課題】トーチケーブルの湾曲半径を大きく取ることができ、トーチケーブルのストレス軽減、ケーブル耐久性の向上を図ることができるとともに、ワイヤ送給時の送給抵抗が軽減されて安定した送給ができ、溶接への悪影響を抑制できる溶接ロボットを提供する。
【解決手段】
ワイヤ送給装置30は、溶接ロボット10の傾動台15に対して、支持部15aよりも、基端側寄りの位置に設けられることにより、回転軸線16からオフセットして、取付けられている。ワイヤ送給装置30のワイヤ送出口42と溶接用トーチ19間に接続されたトーチケーブル50はワイヤ送出口42から延出された部位が、アッパアーム14の軸部を通過しないように、該軸部よりもアッパアーム14の先端側に向けて延出されるとともに、回転軸線16に交差するように配置されている。
(もっと読む)
可動ユニットおよびそれを備えたロボット
【課題】ベース部と可動ユニットとの間、あるいは可動ユニット間での配線が不要で、可動ユニットの動きが制限されず、可動ユニットの交換が容易で、大電力を伝送できる可動ユニットおよびそれを用いたロボットを提供すること。
【解決手段】可動アーム20を駆動する駆動力を利用して、可動アーム20で必要な電力の発電を行うので、可動アーム20への配線を不要にできる。また、配線がないので、可動アーム20の交換を容易にできる。さらに、駆動力を利用して機械的に発電を行うので大電力を伝送できる。したがって、可動アーム20の動きが制限されず、可動アーム20の交換が容易で、ベース部10と可動アーム20間で大電力を伝送できる可動アーム20を得ることができる。
(もっと読む)
ワイヤ送給装置
【課題】アームを軸周りに回転させたときに、アーム内を通過しているトーチケーブルの捩れを防ぐことができるワイヤ送給装置を提供することを課題とする。
【解決手段】トーチケーブル2が上部アームR3内を軸方向に通過している溶接ロボットにおいて、トーチケーブル2内の溶接ワイヤ3を送給するワイヤ送給装置1であって、上部アームR3の軸周りに回転自在な状態で、上部アームR3の内周面に取り付けられるとともに、トーチケーブル2が取り付けられている本体部材20と、上部アームR3の軸方向と直交する軸周りに回転自在な状態で、本体部材20に取り付けられた送りローラ30と、を備え、トーチケーブル2から露出した溶接ワイヤ3が、送りローラ30の周面31に接触しており、送りローラ30が回転することで、溶接ワイヤ3が上部アームR3の軸方向に送り出されることを特徴としている。
(もっと読む)
溶接用トーチ組立体及び溶接用ロボット
【課題】
ショックセンサユニットのセンサボディと駒部材間のシール性を上げることにより、ショックセンサユニット内をエアーブロー用の圧縮空気の通過ができるとともに、同ショックセンサ内をシールドガスと圧縮空気の供給通路にでき、その結果、圧縮空気の管路の外配をなくすことができる溶接用トーチ組立体及び溶接用ロボットを提供する。
【解決手段】
ショックセンサユニット72、スウイングシャフト46及び溶接用トーチ13の通路が、圧縮空気の通路として兼用されるとともにスプリングガイド83にはセンサボディ73に摺接するとともに圧縮空気の漏出を防止する摺動シール84,85を設け。この結果、ショックセンサユニット72のセンサボディ73とスプリングガイド83間のシール性を上げることにより、ショックセンサユニット72内をエアーブロー用の圧縮空気の通過ができる。
(もっと読む)
産業用ロボットの線条体処理構造
【課題】本発明は、作業ツール及び手首が複雑な動きをした場合であっても、手首に配索される線条体の挙動を安定させることができ、線条体の接続信頼性を高めることができる産業用ロボットの線条体処理構造を提供する。
【解決手段】電磁弁ボックス12を有する前腕7と、一端に前腕7が回動自在に連結され、他端にハンド15を有する手首8〜9とを備え、ハンド15に接続するハンドケーブル20が、電磁弁ボックス12を経由して、手首8〜9に沿って配索されている産業用ロボットの線条体処理構造において、ハンドケーブル20を通す導管13が、前腕7側からハンド15側にかけて手首8〜9の内部に設けられ、導管13の一端がハンド15側で固定され、導管13の他端が前腕7内部で導管13の長手方向に摺動可能に挿入されている。
(もっと読む)
溶接ロボットにおけるワイヤ送給装置の設置方法、溶接ロボットにおけるワイヤ送給装置の設置構造及び溶接ロボット
【課題】ワイヤ送給装置から回転アームの内部空間を介して溶接用トーチ迄に配置されるトーチケーブルの変曲点を少なくでき、或いは内部空間から通過した部位の反り上がりを可及的に少なくできて溶接への悪影響を抑制できる溶接ロボットにおけるワイヤ送給装置の設置方法、設置構造、及び溶接ロボットを提供する。
【解決手段】
溶接ロボットにおいて、ワイヤ送給装置22のワイヤ送出口24がアッパアーム14の回転軸線14aの下方に位置され、回転軸線14aに対して斜め上方に向くように、かつ、ワイヤ送出口24に接続されるトーチケーブル30が内部空間SPにおいて、回転軸線14aを下方から上方へ交差するようにワイヤ送給装置22が設置されている。
(もっと読む)
産業用ロボット
【課題】線条体の収納スペースのコンパクト化を図ることにより、アームのコンパクト化を図ることができ、これによってロボットの動作安定性を高めることができる産業用ロボットを提供する。
【解決手段】アーム17と、アーム17に回動可能に連結されている手首要素22と、手首要素22の先端側に装着されている作業ツールと、手首要素22に搭載されているモータ70と、を備え、作業ツールに接続する線条体51及びモータ70に接続するフラットケーブル110が、アーム17側から作業ツール又はモータまで手首要素22に沿って配索されている産業用ロボットにおいて、アーム17の内部に、手首要素22の回転軸方向に延在するパイプ材100が設けられ、パイプ材100の内側に作業ツールに接続する線条体51が通され、パイプ材100の外側にモータに接続するフラットケーブル110が手首要素22の回動方向で余長を有して巻回されている。
(もっと読む)
ロボット
【課題】作動軸を貫通する配管等が作動軸の軸線方向への移動により損傷するようなことがなく、設置スペースが相対的に狭いロボットを提供する。
【解決手段】作業部材用取付座が一端部に設けられた作動軸5と、この作動軸5を軸線方向に移動自在に支持する揺動式アーム4とを備える。作動軸5の軸心部に、接続部材(配管等104)を通す中空部が形成される。アーム4に、作動軸5に沿うように柱状部材(支柱62,63)を立設する。接続部材を、所定本の空気配管、所定本の電力供給用ケーブルあるいは所定本の信号用ケーブルのうち少なくとも一つによって構成する。接続部材における作動軸5から導出された部位を、コイル状に形成し、柱状部材に貫通させて保持させる。このコイル状部分145,146を所定の曲げ弾性を有するように形成する。このコイル状部分145,146における柱状部材の一端部をアーム4に支持させ、他端部を作動軸5に接続した。
(もっと読む)
ロボット
【課題】作動軸の中空部に接続部材が挿通する構造を採りながら、クリーンルームでも使用可能なロボットを提供する。
【解決手段】中空な作動軸5と、この作動軸5を回動と軸線方向への移動とのうち少なくともいずれか一方が可能となるように支持する揺動式アーム4と、アームを支持する基台2とを備える。作動軸5の中空部に、空気配管、電力供給用あるいは通信用のケーブルのうち少なくとも一つからなる配管等104を挿通する。この配管等104における作動軸5から導出された部位にコイル状の弾性変形可能な余裕部111,112を形成する。この余裕部の一端部を作動軸5に支持させ、他端部をアーム4に支持させる。アーム4に作動軸5と余裕部111,112とを覆うカバー9を備えさせる。このカバー9の内部を基台2まで延びる通路に連通させ、この通路に配管等104を通して基台2に導いた。
(もっと読む)
ロボット
【課題】作動軸を貫通する接続部材が作動軸の回動により損傷するのを防ぐ構成を採りながら、設置スペースが狭くてよいロボットを提供する。
【解決手段】作動軸5の軸心部に、作業部材に接続される接続部材(配管等)104を通す中空部が形成される。接続部材を、空気配管、電力供給用あるいは通信用のケーブルのうち少なくとも一つによって構成する。接続部材における前記作動軸5の他端部から導出された部位をねじりコイルばねとなるようにコイル状に形成する。このコイル状部分を前記アームの支持部材(上部支持部材)116によって作動軸5と同一軸線上に保持させる。このコイル状部分の一端部を作動軸5に一体に回動するように支持させ、他端部を支持部材によって作動軸5と一体に回動することがないように作動軸5の回転方向において支持させる。前記コイル状部分の他端部と前記アームとの間で接続部材を保持する保持部材を備えている。
(もっと読む)
作業ツールを備えたロボット
【課題】作業ツール管理装置を備えた前腕後部が上腕の内側を通過するアーム姿勢となるときであっても、線条体または作業ツール管理装置が上腕に干渉しないようにする。
【解決手段】ロボットの線条体処理機構において、作業ツール管理装置(34)に動力、信号および材料のうちの少なくとも一つを供給する作業ツール管理装置用線条体(50)は、旋回胴(12)に取付けられた側面とは反対側に位置する上腕(14)の側面において旋回胴から上腕の長手方向に沿って案内され、前腕(18)の前面(18b)に案内され、次いで上腕が取付けられている側面とは反対側に位置する前腕の側面を通って作業ツール管理装置(34)に接続されている。さらに、作業ツール管理装置用線条体は、前腕の側面または前面に取付けられた線条体中継部(39)により中継されて作業ツール管理装置に接続されている。
(もっと読む)
線条体収容型アームを備えたロボット
【課題】線条体収容型アームを備えたロボットにおいて、ツール管理中継装置がアーム動作に及ぼす影響を低減しつつ、線条体の交換作業を円滑に遂行できるようにする。
【解決手段】ロボット10は、貫通路34を有する前腕部18と、前腕部18に関節連結される手首部20と、前腕部18の貫通路34に挿通され、手首部20に沿って敷設される線条体38と、貫通路34の近傍で前腕部18に搭載され、線条体38が接続される接続部44を有するツール管理中継装置46と、ツール管理中継装置46を、接続部44が貫通路34の開口に隣接して配置される第1位置と、接続部44が貫通路34の開口から離隔して配置される第2位置との間で、移動可能に担持する搭載機構68とを備える。搭載機構68は、ツール管理中継装置46を、第1位置で前腕部18に解除可能に固定するとともに、第2位置で前腕部18に静止可能に担持する。
(もっと読む)
真空用ロボットおよびそのモータ
【課題】半導体製造装置や液晶製造装置における真空容器内で使用されるロボットにおいて、容器内の圧力上昇を低減でき、また、発塵による搬送対象物のワークや周囲環境への汚染をさせることなく、小型、軽量化が図れ、かつ製品の信頼性を向上させることが可能な真空ロボットを提供する。
【解決手段】アーム部を駆動するモータ部5において、ロータ部14とステータ部8の電磁ギャップの隙間に、ステータ部8をハウジング9に内包して密封するように固定される薄板円筒状のキャン16を設けて形成された空間15が、減圧された状態で封止されて維持されるように構成した。
(もっと読む)
ロボット
【課題】独立に回動する2つのハンドに制御系統線を容易に供給でき、且つ2つのハンドを大きな相対角度で回動できるロボットを提供する。
【解決手段】アーム11とアーム11の一端に設けられた回動関節部20と回動関節部20に2段に重ねて連結されて、独立に回動される第1及び第2のハンド12,13とを有し、回動関節部20が前記第1ハンド12にハンド制御系統線21、22を通す中空部23と、その胴部の一部が切り欠き部24を有し、第1ハンド12に連結してこれを回動させる第1連結部材14と、第1連結部材14の外側に設けられ第2ハンド13に連結してこれを回動させる第2連結部材15と、第1連結部材14の中空部23と切り欠き部24を経由して第2ハンド13にハンド制御系統線22を通すガイド部材25を備えたリング部材26とを備え、ガイド部材25の回動に追従できるように弛みを有して筐体内に保持される。
(もっと読む)
産業用ロボットの線条体処理構造
【課題】 本発明は、線条体の挙動を安定させることができると共に、前腕上方及び/又は前腕後方で線条体の余長の張り出しを抑制でき、これにより線条体の干渉を防止することができる産業用ロボットの線条体処理構造を提供する。
【解決手段】 一端が第2手首要素6に固定され、他端が第2手首要素6から第1手首要素5に向かう方向で、第1手首要素5及び第2手首要素6に沿って湾曲して延在する自由端であり、線条体20を一端と他端との間でガイドする可撓性の板状ガイド部材10と、板状ガイド部材10の他端側に取り付けられ、板状ガイド部材10の他端の変形範囲を、主として板状ガイド部材10の板厚方向に制限し、板状ガイド部材10が線条体20と共に板厚方向に直交する長手方向に往復移動できるようにするガイド制限部材15と、前腕4上で板状ガイド部材の手前側に設けられ、板状ガイド部材にガイドされる線条体を挿通させる挿通部材14とを備える。
(もっと読む)
供給ライン案内装置および産業用ロボット
産業用ロボット(32)において供給ライン(38)の補償運動を可能とするために、ライン案内装置が特に伸縮ファークの態様に構成して設けられており、後側ロボットアーム(30)に固着された滑り案内要素(4)が設けられており、この滑り案内要素によって滑り棒(6)が摺動可能に案内されている。滑り棒(6)の前側末端に第1締付固定具(24)が配置されており、この締付固定具内で供給ライン(38)が締付けて固着されている。 (もっと読む)
ロボットの線条体案内装置及び線条体案内装置を備えたロボット
【課題】 他の構成部材又は外部と線条体との干渉を最小限に抑えるとともに剛性の高い線条体案内装置、及び該装置を備えたロボットを提供する。
【解決手段】 線条体案内装置すなわちアダプタ20は、第3手首要素18に固定される第1板状部材21と、第1板状部材21と略平行に対向配置された第2板状部材22と、第1板状部材21及び第2板状部材22を互いに連結する連結部材23とを有する。第1及び第2板状部材21及び22並びに連結部材23は協働して、線条体32をアダプタ内部に導入するための第1開口部25を画定する。第2板状部材22の、エンドエフェクタ30に固定される固定部分からいくらかオフセットして(すなわち手首第3軸54からずれた位置に)延びる延長部分には、線条体32を挿通可能な第2開口部26が設けられる。
(もっと読む)
1 - 20 / 27
[ Back to top ]