
Fターム[3C007CY02]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | エネルギー供給 (611) | 給電(電気信号を含む) (203)
Fターム[3C007CY02]に分類される特許
1 - 20 / 203
多関節ロボット
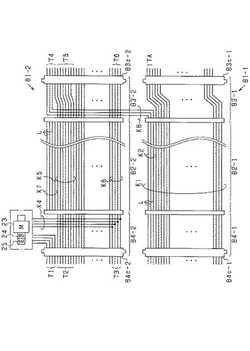
【課題】複数の関節アクチュエータでの配線構造の共通化を図り、しかも自己の電源ノイズによる制御系への悪影響を抑制する。
【解決手段】関節アクチュエータの配線モジュールにおいて、入力側コネクタ84c−2には全アクチュエータ共通の分配用端子T1が設けられ、出力側コネクタ83c−2には全アクチュエータ共通の次段電力用端子4が設けられている。また、配線モジュールにおいて、電源線配列部K1で信号線K6から最も離れた位置にある次段用電源線K2を次段電力用端子T4に接続すること、及び、電源線配列部K1の残りの電源線を、1関節アクチュエータ分の電源線の分ずつ信号線K6から離れる側にずらして出力側コネクタ83c−1に接続することにより、電源線の配列が組み替えられている。
(もっと読む)
ロボット

【課題】ロボットにおいて、エンコーダデータを確実に保持しつつバックアップ用電池の交換作業の容易化を図る。
【解決手段】ロボットは、主電源部とロボット本体部と外部バックアップ電源部とを備える。ロボット本体部は、サーボモータと、エンコーダデータを記憶するエンコーダ部と、エンコーダ部にバックアップ電源を供給する内部電池を含む内部バックアップ電源部とを有する。外部バックアップ電源部は、ロボット本体部の外部に設けられ、エンコーダ部にバックアップ電源を供給する。主電源部による供給電圧Vsは外部バックアップ電源部による供給電圧Vbat1より大きく、供給電圧Vbat1は内部バックアップ電源部による供給電圧Vbat2より大きく、供給電圧Vbat2はエンコーダ部の最低動作電圧Vsysより大きい。
(もっと読む)
ワーク搬送装置
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
ケーブル支持装置
【課題】ケーブルのたるみを大きくすることなく且つ保持部のストロークを長大化することなく、ロボット手首の自由度に十分に追従させることができるケーブル支持装置を提供する。
【解決手段】ケーブル11を保持する保持部52と、第2アーム24の長手方向に沿って移動自在な直動スライダ70を有する直動機構54と、第2アーム24の周方向に沿って回転自在な回動スライダ92、93を有する回動機構56とを備える。直動機構54及び回動機構56により、保持部52が第2アーム24の長手方向及び周方向に変位自在となっている。
(もっと読む)
連結移動装置
【課題】移動体が目標地点へ移動している途中で、バッテリー残量が低下しても、当該移動体が継続して移動できるようにする。
【解決手段】連結移動装置10は、不整地上を移動する複数の移動体3と、これらの移動体3を連結し電力を伝達可能な線状体5とを備える。複数の移動体3が、線状体5で連結された状態で移動する。各移動体3は、不整地上を移動するための移動手段と、給電されることにより該移動手段を駆動する駆動装置と、移動用エネルギーを蓄積し該エネルギーを用いて駆動装置に給電する給電装置と、を有する。各移動体3の給電装置は、他の移動体の給電装置から線状体5を介して電力を受けられるようになっている。
(もっと読む)
塗装ロボット及び塗装システム
【課題】塗装ブースを小型化することが可能な塗装ロボット及び塗装システムを提供する。また、ケーブルを覆うケーブル保護部材を省略することが可能な塗装ロボット及び塗装システムを提供する。
【解決手段】 塗装ロボット50は、塗装ブース20の側壁22に固定される固定部62と、固定部62に対して旋回可能に設けられる旋回部64と、旋回部64に設けられるアーム66と、アーム66の先端部に設けられる塗装ガン68と、を備え、側壁22に固定される固定部62の固定面120に、ケーブル92a、92bを引き込むケーブル引込部112a、112bが設けられる。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制する。
【解決手段】組立ロボットは、ロボットアーム、ロボットハンド2および制御部を備え、ロボットハンド2は、ワークを把持する把持部、および、把持部に駆動用の圧縮エアを供給する電磁弁33を備える。組立ロボットでは、把持部制御信号が制御部からロボットハンド2の無線通信部35へと無線にて送信され、把持部によるワークの把持状態を示す把持状態信号が、無線通信部35から制御部へと無線にて送信される。このため、制御部とロボットハンド2との間において、把持部制御信号および把持状態信号の送受信用の配線が不要となる。このように、ロボットハンド2に接続される配線を削減することにより、配線によりロボットハンド2やロボットアームの可動範囲が制限されてしまうことを抑制(または防止)することができる。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
(もっと読む)
ロボットの手首構造及びロボット
【課題】周辺機器との干渉を低減することが可能なロボットの手首構造及びロボットを提供する。
【解決手段】ロボット10の手首部20は、第1の軸回りに回転する第1の手首アーム40aと、第1の手首アーム40aの先端部に設けられ、第1の軸に実質的に交差する第2の軸回りに揺動する第2の手首アーム40bと、第2の手首アーム40bの先端部に設けられ、第2の軸とねじれの位置にある第3の軸回りに回転する手首フランジ42と、手首フランジ42に固定される中間部材44と、中間部材44に固定されるエンドエフェクタ22に接続される線条体25bとを備え、線条体25bが、第2の手首アーム40b、手首フランジ42、及び中間部材44の内部を通り、中間部材44から外部に引き出されてエンドエフェクタ22まで配線される。
(もっと読む)
ロボットハンド
【課題】ロボットハンドにて簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断する。
【解決手段】ロボットハンドでは、ハンド本体部3と把持部を有するハンド先端部4とが着脱自在である。ハンド本体部3は、第2穴部352、第2穴部352内に設けられる摺動部38および付勢部39、把持部の駆動用の流体が流れる第2流体流路342、並びに、把持部からの信号が伝送される伝送経路37を有する。これらの流路および経路の一部は摺動部38に形成される。ハンド先端部4の非装着時には、摺動部38が付勢部39に付勢されて遮断位置に位置し、これらの流路および経路が遮断され、ハンド先端部4の装着時には、ハンド先端部4により押されて摺動部38が接続位置に位置し、これらの流路および経路が摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37が遮断される。
(もっと読む)
医療用マニピュレータ
【課題】マニピュレータを電気メスとして使用する場合であっても、先端動作部での通電経路を適切に確保して、その動作や手技を円滑に行うことができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、ワイヤ80bの進退駆動によって従動回転される歯車体126等により、少なくとも軸線方向を中心とするロール方向への回転動作が可能な先端動作部12を備える。先端動作部12は、高周波電源23から、第1通電経路E1及び第2通電経路E2を介してそれぞれ通電されることにより、その間で生体に通電可能な一対のグリッパ部材308、309を有する。先端動作部12における第1通電経路E1及び第2通電経路E2は、ロール方向へと先端支持部材161と共に回転可能なスリップリングR1、R2を含む第1構造部S1と、第1構造部S1より基端側に設けられて通電ピンP1、P2を有し、ロール方向には回転しない基端部材402を含む第2構造部S2とを備える。
(もっと読む)
ロボットシステム
【課題】ロボットの運転に際し、制御ユニット側からロボット側のエンコーダに対して適正な駆動電源を供給し、ひいてはエンコーダの検出性能を確保する。
【解決手段】ロボット10は、複数のモータ21〜26と複数のエンコーダ21a〜26aとを備えている。ロボット10と制御ユニット30とは電気ケーブル40を介して接続されており、それにはエンコーダ駆動電源を供給する電源ケーブル42が含まれている。制御ユニット30は、コントローラ31と電源回路32とを備えており、コントローラ31は、電源回路32で生成される電源電圧を、エンコーダ駆動に適した適合電源電圧に調整する。このとき、コントローラ31は、電源電圧を複数の段階で変更しながら設定し、電源電圧が設定された状態で、各エンコーダ21a〜26aの通信状況の良否を判定する。そして、通信状況が良好であると判定された時の電源電圧に基づいて、適合電源電圧を算出する。
(もっと読む)
産業用ロボットの回転関節用配線装置
【課題】ロボットの高速動作に良好に追随しつつ主配線の断線についての事前検出ができ、しかも断線原因の解明に有効に寄与できるようにする。
【解決手段】主配線14−1、14−2及び断線事前検出用配線14−3は、FPCから構成されている。断線事前検出用配線14−3は主配線14−1、14−2と厚み方向で並ぶように設けられ、主配線14−1、14−2よりも僅かに早く断線するように設定されている。さらにこの断線事前検出用配線14−3は反転部Tでの位置が主配線14−1、14−2より外側としている。この結果、主配線14−1、14−2に発生したマイクロクラックが該断線事前検出用配線14−3に拡大された形態で現出する。
(もっと読む)
ロボットの回転関節用配線装置
【課題】ロボットの回転関節により結合される2つの部材間の配線としてフレキシブルプリント配線板を用いた構成において、過電流が流れた部分をその継続時間にかかわらず特定可能にする。
【解決手段】
ロボットの相対回転する各部材間にて電気信号を伝達するためのFPC板14の延長部14b、14cは、中間部分で切断された後、それぞれポリスイッチ71〜74が搭載された基板61、ポリスイッチ75〜78が搭載された基板64を介して再接続される。熱感応シール60は、ポリスイッチ71〜78から離れたところに位置するFPC板14の延長部14aの表面におけるコネクタ33との接続部分に貼り付けられる。熱感応シール60は、全ての導電線27を覆うようにして配置される。熱感応シール60は、導電線27に過電流が流れたとき、その導電線27が発する熱により感応するように検知温度が設定されている。
(もっと読む)
作業ツール用線条体の配索方法及び配索装置
【課題】ロボットの動作制限を解消しつつ実施する作業種類の制約を抑制できる作業ツール用線条体の配索方法及び配索装置を提供する。
【解決手段】ツールスタンド3に待機保持され且つロボット4の手首に選択的に着脱される作業ツールTと作業ツール用制御盤5とを接続する配線及び配管の少なくとも一方を含む線条体としてのケーブルガイド7の配索装置である。前記ツールスタンド3に回転可能に配置され前記作業ツールTに先端を接続した線条体の中途部を巻掛け保持する回転ドラム8を備える。そして、前記回転ドラム8に巻掛けた線条体の後端側に対して下方へ牽引力を付与して、前記作業ツールTの移動に伴い回転ドラム8の前方に引出される線条体に対して予め設定した引張り力を付与する付勢手段としてのスプリングバランサ12を備える。
(もっと読む)
移動型ロボットシステム
【課題】 自律移動や自律作業が可能な移動型ロボットにおいて、充電による可動範囲の制限や作業内容の制限を受けずに、作業を継続可能な技術を提供する。
【解決手段】 移動して所定の作業を自律的に実行する移動型メインロボット(10A)と、その移動型メインロボット(10A)に対して装着可能であるとともに移動型メインロボット(10A)とは別に移動可能な移動型サブロボット(20A,20B,20C,20D)と、その移動型サブロボット(20C)に対して充電を実行する充電装置(30)とを備える。移動型メインロボット(10A)は、電気エネルギを供給するメインバッテリ(11)を備える。前記移動型サブロボットは、前記の移動型メインロボット(10A)に装着された場合に前記メインバッテリ(11)へ電気エネルギを充電する内蔵バッテリを備える。移動型メインロボット(10A)に装着されていない場合であって内蔵バッテリの電気エネルギが少ない場合には、充電装置(30)へ自律移動して充電する。
(もっと読む)
多関節ロボット
【課題】アクチュエータ間の配線の絡みを防止することで電気配線の設置の好適化を図り、その上でしかも多関節ロボットの小型化を実現する。
【解決手段】関節アクチュエータ10は、モータモジュール11と、このモータモジュール11に組み付けられる配線ユニット13とを備えている。モータモジュール11の軸方向両端にはそれぞれトップカバー12とエンドカバー14とが設けられており、これらトップカバー12とエンドカバー14とに配線ユニット13のコネクタ83,84がそれぞれ取り付けられている。配線ユニット13のFPCケーブル82はモータハウジング27の外周に周回させて設けられている。また、配線ユニット13はモータハウジング27を回転軸として回転する筒体73を備えており、筒体73にFPCケーブル82が固定されている。
(もっと読む)
産業用ロボット内部の線条体の配線方法
【課題】線条体を産業用ロボット外部に露出させることなく産業用ロボット内部に配線することができ、かつメンテナンス時に線条体を容易に交換することが可能な、産業用ロボット内部の線条体の配線方法を提供する。
【解決手段】まず、基端側線条部材21の一端21aを基台11に接続し、基端側線条部材21の他端21bを、基台11から第1の収納室12を通って、第1のロボット腕13まで配線する。次に、先端側線条部材22の一端22aを、第1のロボット腕13から第2の収納室14を通って第2のロボット腕15まで配線し、さらに先端側線条部材22の一端22aを手首部16に接続する。その後、基端側線条部材21の他端21bと、先端側線条部材22の他端22bとをコネクタ23によって接続する。
(もっと読む)
移動体の充電装置及びその制御方法
【課題】一方の引張り出し検知センサが故障した場合であっても、配線部材が所定以上に引張り出されたとき、異常処理を行うことが可能な移動体の充電装置を提供する。
【解決手段】充電スタンド2は、ケーブル5aの第1の引張り出しを検知する第1の引張り出し検知センサ7と、ケーブル5aの第2の引張り出しを検知する第2の引張り出し検知センサ8を備える。制御装置4は、第1の引張り出し検知センサ7による検知に基づいて第1の制御指令を出力し、第2の引張り出し検知センサ8による検知に基づいて第2の制御指令を出力する。
(もっと読む)
スカラロボット
【課題】アームの上下のデッドスペースを低減したスカラロボットを得ること。
【解決手段】ベース10と、第1関節軸を介して水平面内で回動可能にベース10に連結された第1アーム1と、第2関節軸を介して水平面内で回動可能に第1アーム1に連結された第2アーム2と、第2アーム2の先端部に上下動するように設置された先端軸4とを備えたスカラロボットであって、ケーブル15を収容してベース10と第1アーム1との間に架け渡された第1ケーブルダクト11及びケーブル15を収容して第1アーム1と第2アーム2との間に架け渡された第2ケーブルダクト12を備え、第1、第2ケーブルダクト11、12の一端は第1、第2関節軸上に位置しており、第1及び第2ケーブルダクト11、12は、上下方向に関して先端軸4の可動域上下動の範囲内に収まるように設置された。
(もっと読む)
1 - 20 / 203
[ Back to top ]