
Fターム[3C007CY04]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | エネルギー供給 (611) | 関節部の配線 (156)
Fターム[3C007CY04]の下位に属するFターム
ケーブルを回転軸内に貫通させるもの (112)
回転接続手段を有するもの (24)
Fターム[3C007CY04]に分類される特許
1 - 20 / 20
多関節ロボット
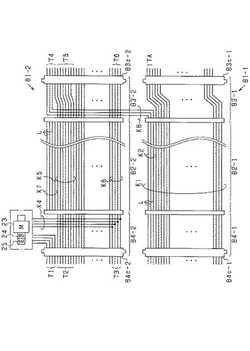
【課題】複数の関節アクチュエータでの配線構造の共通化を図り、しかも自己の電源ノイズによる制御系への悪影響を抑制する。
【解決手段】関節アクチュエータの配線モジュールにおいて、入力側コネクタ84c−2には全アクチュエータ共通の分配用端子T1が設けられ、出力側コネクタ83c−2には全アクチュエータ共通の次段電力用端子4が設けられている。また、配線モジュールにおいて、電源線配列部K1で信号線K6から最も離れた位置にある次段用電源線K2を次段電力用端子T4に接続すること、及び、電源線配列部K1の残りの電源線を、1関節アクチュエータ分の電源線の分ずつ信号線K6から離れる側にずらして出力側コネクタ83c−1に接続することにより、電源線の配列が組み替えられている。
(もっと読む)
スカラロボット

【課題】アームの上下のデッドスペースを低減したスカラロボットを得ること。
【解決手段】ベース10と、第1関節軸を介して水平面内で回動可能にベース10に連結された第1アーム1と、第2関節軸を介して水平面内で回動可能に第1アーム1に連結された第2アーム2と、第2アーム2の先端部に上下動するように設置された先端軸4とを備えたスカラロボットであって、ケーブル15を収容してベース10と第1アーム1との間に架け渡された第1ケーブルダクト11及びケーブル15を収容して第1アーム1と第2アーム2との間に架け渡された第2ケーブルダクト12を備え、第1、第2ケーブルダクト11、12の一端は第1、第2関節軸上に位置しており、第1及び第2ケーブルダクト11、12は、上下方向に関して先端軸4の可動域上下動の範囲内に収まるように設置された。
(もっと読む)
多関節ロボットの駆動制御方法及び多関節ロボットの配線配管保護装置
【課題】配線・配管の機能に支障を来すような大きな張力が加わった場合に有効に対処すること。
【解決手段】ロボットの多関節型アームの第1乃至第4の各アーム部に対してクランプ部によりそれぞれクランプされたケーブル21の、隣り合うクランプ部の間の箇所に、ケーブル保護装置23を適宜介設する。そして、ケーブル保護装置23のハウジング23c内においてケーブル21を、一対のコネクタ23a,23bによって接触離間可能に構成する。さらに、コネクタ23a,23bの接触離間の状態を、ケーブル21のエア配管21aの空気圧や信号線21dの電位によって検出し、コネクタ23a,23bの離間を検出した場合は、ロボットの動作を停止して、直前に通過した通過点に逆転動作させる。コネクタ23a,23bが接触状態に復帰したら、逆転動作前の動作パターンでロボットを動作させる。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】基部アーム及び回動アームの端部同士を連結し、端部を支点として前記回動アームを回動させるマニピュレータ用関節部である。マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔に嵌合する円筒状のハウジングと、該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受と、を有する軸受ユニットと、を備える。ハウジングには、軸方向一方側の外周面に外径側に突出する鍔部が形成され、軸方向他方側の外周面に雄ネジ部が形成され、雄ネジ部にナットを螺合させることにより、回動アームが鍔部とナットに挟まれて軸受ユニットに固定される。
(もっと読む)
電力中継回転継手
【課題】相対的に回転する2つの部材間で、不安定な接点による通電異常を発生させずに導通を維持することができ、更に、ケーブルを省スペースに収容することによって他の部材との干渉を防ぐことができる電力中継回転継手を提供する。
【解決手段】電力中継スイベルジョイント1は、固定部10と、固定部10に対して相対的に回転運動する回転部11と、固定部10と回転部11との間で電気を伝達する第1のケーブル32a及び第2のケーブル32bとを備える。第1のケーブル32a及び第2のケーブル32bは、回転運動の中心をとりまく渦巻き状に配設されている。軸部30が順回転及び逆回転すると、第1のケーブル32a及び第2のケーブル32bは、軸部30にきつく巻きつく方向、及び、軸部30への巻きつきが緩くなる方向に変位する。
(もっと読む)
ロボットの回転関節用配線装置
【課題】フレキシブルプリント配線板(FPC板)を用いてロボットの回転関節用配線装置を構成する場合に、FPC板の早期摩耗を防止する。
【解決手段】ロボットの一方の部材に連結される筐体15および当該筐体15と相対回転可能でロボットの一方の部材と相対回転する他方の部材に連結されるリール20を組み合わせて配線ケース13を構成し、この配線ケース13内に、複数のローラ25を配列した有端環状の摺動補助器23を、リール20の芯部材16を中心に回転可能に配設し、配線ケース13内に収納されたFPC板14は、一端側が芯部材16に他端側が筐体15にそれぞれ連結され、且つ摺動補助器23の内側に位置する部分が当該摺動補助器23の内周に沿うように巻かれると共に摺動補助器23の両端間から当該摺動補助器23の外側に導出された部分が摺動補助器23の外側に当該摺動補助器23の内側とは巻き方向が反対となるように巻かれる構成とした。
(もっと読む)
ケーブルのルーティング
ケーブル(7)は、横回転軸(4)回りに回転可能に接続された一対のリンク(1,2)の間にルーティングされる。ケーブルには、巻軸がリンクの回転軸と一致する巻部(8)が備えられる。巻部(8)は予め形成されることができる。ケーブルプロテクタ(10,11)は、隣接する巻部(8)の端を拘束することにより該端に固定されるように、また、隣接するリンクに固定されるように、回転軸(4)に沿って巻部(8)の各端に備えられる。
 (もっと読む)
(もっと読む)
多関節ロボット
【課題】多関節ロボットにおいて作業機に給電するケーブルが該作業機に当接することを防止する。
【解決手段】多関節ロボット10は、ロール回転する第6関節30と、第6関節30に接続された溶接ガン32と、一端が溶接ガン32に接続され、他端が第1支持部48に接続されたケーブル44と、溶接ガン32に接続され、第6関節30のロール軸Jを基準として径方向に張り出したフランジ42とを有する。フランジ42は、ロール軸Jを中心として、機構部40より大径であり、ケーブル44の一部を支持する第2支持部52を備える。第2支持部52は、ケーブル44をロール軸Jと略平行に支持する。第2支持部52は、ロール軸Jを基準としてC形状部材38と逆の位置に設けられている。
(もっと読む)
ケーブルの配線構造
【課題】トルク損失を大幅に低減することを可能とするケーブルの配線構造を提供することを課題とする。
【解決手段】一軸A1回りに相対回転する第一の部材11と第二の部材12とに跨って巻回されるケーブルの配線構造であって、ケーブルが複数の系統を有するようにして、これらのケーブル13a,13bを、複数の系統の弾性力が互いに打ち消すように配線する。これによって、総合弾性力を中立な状態として、負荷トルクをゼロ近くにすることを可能とする。
(もっと読む)
ロボット
【課題】直動軸に懸架ユニットを懸架する構成において、懸架ユニットが移動した場合における配線保持具からの騒音や発塵を抑制できるロボットを提供する。
【解決手段】直動ユニット2と旋回ユニット3との間を曲面を持つ曲げ状態で接続するケーブルベア15は、曲げ方向が水平方向となるように配置されているので、ケーブルベア15自体が自分自身の重力方向の荷重を受けることが可能となる。これにより、ケーブルベア15と保持部材16とが衝突することがなくなり、衝突音、或いは衝突による発塵を抑制することができる。しかも、ケーブルベア15は、直動軸4の側方に配置されているので、直動軸4の上面にケーブルベア15を配置する構成に比較して、ロボット1の高さ寸法を抑制することができる。
(もっと読む)
マニピュレータ
【課題】マニピュレータにおいて、作業部内に供給ラインを先端の作用部へと導くスペースを確保する。
【解決手段】マニピュレータ10aの作業部12aは、操作指令部14の操作に基づいて回転する駆動プーリ50a〜50cと、連結部16の先端側に設けられた第1回転軸Oyと、該第1回転軸Oyと交差する第2回転軸Opと、前記第1回転軸Oyと並列に設けられた軸Otと、第1回転軸Oyに軸支された筒体140、132と、前記軸Otに軸支された筒体116と、駆動プーリ50a〜50cと筒体140、136、116に巻き掛けられたワイヤ52、54、56と、筒体116の回転を筒体132に伝達する第1歯車118及び第2歯車134とを有する。そして、連結部16から駆動機構部102を経由してエンドエフェクタ104へと導かれる導線24a、24bが、前記筒体132の側部を通過するように構成される。
(もっと読む)
ロボットおよびロボット用ケーブル保持構造およびケーブル保持用部品
【課題】ロボット内部に配線されたケーブルの耐久性を向上させたロボット、ロボット内部に配線されたケーブルの耐久性を向上させるロボット用ケーブル保持構造およびケーブル保持用部品を提供すること。
【解決手段】支持部材と、支持部材に関節部を介して接続されたリンク部材と、支持部材からリンク部材の内部へ配線されたケーブルとを備えたロボットにおいて、関節部を、リンク部材を支持部材に対して1以上の自由度を有するように回動可能に構成し、リンク部材が第1の方向に回動する際にケーブルが屈曲するための支点となる第1の接触部材と、リンク部材が第2の方向に回動する際にケーブルが屈曲する支点となるための第2の接触部材とを備えさせるとともに、第1の接触部材と第2の接触部材とが、ケーブルが屈曲するための各々の支点がケーブルの長さ方向について異なる位置となるように構成した。
(もっと読む)
直線移動装置
【課題】ベースから移動体への配線のためのスペースを小さく済ませ、構成の簡単化を図る。
【解決手段】フレーム12内に、移動体15を左右方向に直線移動可能に支持する金属製の2本のスライドシャフト20,21を設け、移動体15に、それらスライドシャフト20,21の外周に摺動可能に嵌挿されるスライドブッシュ24,25を設ける。フレーム12に、駆動用モータ17、ボールねじシャフト13、ボールねじナット16等からなる駆動機構を設ける。スライドシャフト20,21の左端部に、電力用一次側巻線27,信号用一次側巻線28を巻装する。スライドブッシュ24,25に、電力用二次側巻線29,信号用二次側巻線30を設ける。一次側巻線27,28に交流電流を流し、電磁誘導作用により、二次側巻線29,30に電力,信号を伝達する。
(もっと読む)
メカニカルストッパ機構とこれを備えたロボット装置
【課題】 ストッパ強度を関節フレーム面強度に依存することなく、配線ケーブル類に発生する動きや遊びを許容し、省スペースで有効な関節動作範囲制限が得られるメカニカルストッパ機構を提供する。
【解決手段】 旋回駆動機構部1を介して相互に連結される複数の関節フレーム2,3と、各関節フレーム2,3に設けられた駆動軸を中心とする扇形状の配線用ホール4,5と、各関節フレーム2,3のそれぞれの配線用ホール4,5に通して配線される配線ケーブル類7とを備えた関節リンク機構において、各関節フレーム2,3の配線用ホール4,5間を横断して配され、関節フレーム2,3が動作範囲の限界まで旋回動作した場合に、それぞれの配線用ホール4,5間に挟まれることにより動作範囲を制限する金属スリーブ6を備えて構成する。
(もっと読む)
関節装置
【課題】 本発明の目的は、関節部分の小型化を可能にする関節装置を提供すること。
【解決手段】 本発明の関節装置は、関節部分の内部にケーブル4を収容しており、関節3の回動中心軸部3aと、ケーブル4が少なくとも一回巻回されるケーブル巻回軸部5とを個別に設け、関節3の回動に伴うケーブル4のたわみをケーブル巻回軸部5へのケーブルの巻き締まり・巻き広がりによって吸収させることを特徴としている。
(もっと読む)
追従装置
【課題】ロボットのアームの揺動に溶接ケーブルが追従するように溶接ケーブルを支持することができる追従装置を提供する。
【解決手段】支持アーム16と、この支持アーム16の先端側から垂下されて溶接ケーブル1を吊り下げ支持する弾性部材とを有するケーブル支持体2を、ロボットアーム5の揺動に従って移動させる追従装置である。ロボット本体部4の上部に設置された一対のシリンダ19、20の伸縮によって、ロボット回転軸6の移動角度の方向へ移動し、かつその移動は現時点の停止位置から次の停止位置までにロボット回転軸6が所定角度以上移動した場合に有効となる。
(もっと読む)
ケーブルガイド
【課題】ロボットアーム、工作機械等の、移動する移動部材を備える機器のケーブルガイドにおいて、特別なスペースを必要とせず、ケーブル保護の信頼性が高いケーブルガイドを提供する。
【解決手段】ケーブル案内用貫通孔5を備えたケーブル保護部材8において、ケーブル案内用貫通孔5の、角部6および内周面に、自己潤滑材料をコーティングする。また、角部6の形状を略R面取り加工する。
(もっと読む)
電圧ケーブルおよびロボットアーム、塗装ロボット、塗装システム
【課題】電圧ケーブルを備えたロボットアームにおいて、柔軟性向上および断線防止の少なくとも一方を実現できる電圧ケーブルを提供する。
【解決手段】ロボットアームは、複数のアーム部材16,18と、先端アーム18の内部に設けられ、受電部26を備えるスプレーガン28と、受電部26に高電圧を供給する電圧発生装置24と、電圧発生装置24で発生した電圧を受電部26に供給する電圧ケーブル30と、を有する。電圧ケーブル30は、絶縁性材料からなる管体と、管体内部に充填される導電性液体を有する。
(もっと読む)
2つの部分から構成される遠隔操作アーム
本発明の遠隔操作アームは主アーム(5)及び従アーム(1)を備え、それら2つのアームは互いに機械的に分離されており、且つ、制御ユニット(7)と、従アームを駆動させるための機械ユニット(8)とを有するインターフェースシステム(6)によって連結されている。本発明によれば、機械ユニット(8)は、固定モータと、従アームの水平部分の管状セグメント(3)を少なくとも完全に1回転させて作業負荷を増大させる伝達装置とを有している。
選択図 図1  (もっと読む)
(もっと読む)
ロボット・アプリケイションためのパワーサプライ・システム
本発明は、産業用ロボットまたはマニピュレータを有するロボット・アプリケイション1,301に電力を供給するためのパワーサプライ・システムに係る。このロボット・アプリケイションは、ロボット・アプリケイションのコントロールのための無線通信部品20,21を有している。このパワーサプライ・システムは、一次側パワーサプライ部品10及び二次側パワーサプライ部品12を有している。二次側パワーサプライ部品12は、二つまたはそれ以上の系統の電力31,32を供給するように構成されたロジック部品16を有しており、それらの供給される電力32の内の少なくとも一つは、独立してコントロール可能である。このようにして、停止信号を受けたとき、センサー2または情報処理デバイスへの電力の供給を維持したまま、例えばアクチュエータ4のような機能部品への電力の供給を遮断することが可能である。本発明の他のアスペクトにおいて、上記の方法を実施するための方法及びコンピュータ・プログラムが説明される。  (もっと読む)
(もっと読む)
1 - 20 / 20
[ Back to top ]