
Fターム[3C007CY06]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | エネルギー供給 (611) | 関節部の配線 (156) | 回転接続手段を有するもの (24)
Fターム[3C007CY06]に分類される特許
1 - 20 / 24
ワーク搬送装置
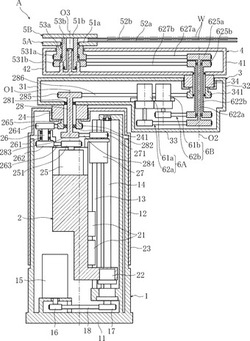
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
ロボットハンド

【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
(もっと読む)
医療用マニピュレータ
【課題】マニピュレータを電気メスとして使用する場合であっても、先端動作部での通電経路を適切に確保して、その動作や手技を円滑に行うことができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、ワイヤ80bの進退駆動によって従動回転される歯車体126等により、少なくとも軸線方向を中心とするロール方向への回転動作が可能な先端動作部12を備える。先端動作部12は、高周波電源23から、第1通電経路E1及び第2通電経路E2を介してそれぞれ通電されることにより、その間で生体に通電可能な一対のグリッパ部材308、309を有する。先端動作部12における第1通電経路E1及び第2通電経路E2は、ロール方向へと先端支持部材161と共に回転可能なスリップリングR1、R2を含む第1構造部S1と、第1構造部S1より基端側に設けられて通電ピンP1、P2を有し、ロール方向には回転しない基端部材402を含む第2構造部S2とを備える。
(もっと読む)
多様な関節の形に適用可能なアクチュエータモジュール
【課題】多関節ロボットの関節部に利用されるアクチュエータにおいて、減速機とアクチュエータ本体を多様に配置することが出来て多様な関節の形に適用可能なモジュール構造を提供する。
【解決手段】アクチュエータモジュールは、電子部と駆動部が含まれ構成されたアクチュエータ本体100と分離・結合された減速機200が具備され、アクチュエータモジュール本体の1次減速によって得られた速度とトルクを2次減速機を通して変更することが容易であり、減速機がアクチュエータ本体と分離・結合されるため、多様な形の減速機を適用することが出来、減速機とアクチュエータ本体を多様に配置することが出来て多様な関節の形に適用可能であり、前記アクチュエータモジュールを利用して多様な関節構造を形成することが出来る。
(もっと読む)
自動機による位置出し方法及び自動機の位置出し装置
【課題】 安価で正確且つ迅速に位置出しを行なうことができる自動機による位置出し方法及び自動機の位置出し装置の提供。
【解決手段】 X軸方向へ移動し、且つθ方向へ旋回するアーム1と、当該アーム1の旋回面に対して平行であり、且つ略平坦な作業テーブル2を備え、アーム1の先端部に作業テーブル2へ向けたチャック3を回転自在に支持した自動機による位置出し方法において、アーム1の先端部に作業テーブル2又は作業テーブル2上の物体の表面の高低を検出するセンサ4を支持し、作業テーブル2又は作業テーブル2上の物体におけるターゲットポイントに球面状ゲージ5を載せ、センサ4で作業テーブル2又は作業テーブル2上の物体のターゲットエリアをX軸方向への移動とθ方向への旋回で走査し、センサ4から得た検出信号の変化を以って球面状ゲージ5の頂部を検出し、当該頂部の位置座標を保存する自動機による位置出し方法。
(もっと読む)
ロボットのアーム連結装置
【課題】ゴムホースによることなく、アーム間の回転を吸収可能な空気通路を構成する。
【解決手段】手首部に設けられたモータの回転をフランジに伝えるシャフト13に給気用環状溝23、排気用環状溝24を形成し、シャフト13に嵌合されたスリーブ17に両環状溝23,24に連通する中継路19,20を形成してこれら中継路25,26に手首部に設けられた給気用管路15と排気用管路16を接続する。また、シャフト13に両環状溝23,24に連通する中継路25,26を形成してこれら中継路25,26にフランジ8に設けられた給気用接続管29と排気用接続管30を接続する。Oリング溝36,38については、外側の隅角部Aの曲率半径を大きくして応力集中を緩和し、且つ隅角部A側に補填リング42,43を嵌める。
(もっと読む)
エアーブロー装置
【課題】エアーホースがロボットアームに巻き付くことがなく、その結果エアーホースがロボットアームに擦れて表面に付着したホコリ、ブツが剥離し、落下することによる塗装面の不良を招くことがないエアーブロー装置を提供する。
【解決手段】自動車ボディの電着塗装における塗料若しくは水洗水の二次タレを防止するために使用されるエアーブロー装置1は、ロボットアーム2の先端にブラケット3によりエアーホース9が接続されたエアーブローノズル4が取り付けられており、エアーブローノズルの先端にノズルヘッド6を有する回転プレート5が回転可能に取り付けられている。エアーブローノズル先端部の回転プレートが回転してもエアーホースが接続されているエアーブローノズルは回転しないので、エアーホースがロボットアームに巻き付くことがない。
(もっと読む)
ロボットハンドユニット
【課題】エアーの供給経路及び電気回線の分岐をロボットハンドユニットの回転部分に於いて行うことにより、固定フランジ側の複雑化、重量化を招くことなくエアーの供給経路及び電気回線を必要数確保する。
【解決手段】固定フランジ3のエアーの移送路22を回転軸4の連通路24と接続し、この連通路24をマニホールド31を介して複数の分岐流路26に分岐し、この分岐流路26を電磁弁34を介してロボットハンド6と接続して、各ロボットハンド6にエアーを供給可能とする。固定フランジ3に給電部35を固定し、給電部35を回転軸4の受電部37と接続回線38を介して接続する。受電部37に於いて、接続回線38を複数の分岐回線58に分岐し、この分岐回線58をロボットハンド6に接続する。
(もっと読む)
空間内で対象物を運動させかつ位置決めするための装置
空間内で対象物を運動させかつ位置決めするための装置において、それぞれ1つのモータ/変速機ユニット(16)に結合された、モータ/変速機軸線(s)を中心として旋回可能な少なくとも3つの操作アーム(18)が設けられており、各操作アーム(18)の自由端が、結合ロッド(36,38)を介して支持エレメント(26)に枢着結合されており、該支持エレメント(26)が、真空ホース(54,54a,54b)を介して真空源に接続可能な少なくとも1つの把持手段(50)を有しており、該把持手段(50)が、対象物を吸引して把持するための吸込み開口(52)を有しており、前記真空ホース(54,54a,54b)が、前記支持エレメント(26)から前記モータ/変速機ユニット(16)のうちの1つのモータ/変速機ユニット(16)のモータ/変速機軸線(s)にまで案内されていて、実質的にモータ/変速機軸線(s)に配置されかつ前記モータ/変速機軸線(s)を中心として回動可能なホースジョイント(60)を介して、真空源に接続可能である。  (もっと読む)
(もっと読む)
回転装置およびロボットアーム装置
【課題】回転軸の内部を通る空間領域を確保することができないので、ケーブルやフレキ
シブルパイプなどが、回転軸の内部を通ることができないという課題がある。
【解決手段】コイル47とコイル47を覆う磁性体46とコイル47に接続する絶縁皮膜
付導電線53とからなる送信部と、コイル45と、コイル45を覆う磁性体44と、コイ
ル45に接続する絶縁皮膜付導電線52とからなる受信部と、を有する通信ユニットと、
中空の固定部材40と、中空の回転部材42とを連結し、固定部材40に対して回転可能
な軸受け41と、を備え、コイル47とコイル45は、軸受け41の回転軸S1を中心に
巻くようにして形成され、磁性体46と磁性体44は、回転軸S1方向における隙間Gを
形成して対向し、通信ユニットは、固定部材40と回転部材42の内部に備えられる。
(もっと読む)
作業用ロボット
【課題】配線が絡まったりねじれたりすることを防止することができる作業用ロボットを提供する。
【解決手段】作業用ロボット10は、基端側から先端側に向かって順次設けられた複数のアーム体12〜16と、各アーム体12〜16間に介在された回動軸A1〜A6とを備えている。このうち一のアーム体13は2本のアーム部材13A、13Bからなっている。このうち一方のアーム部材13Bは金属材料からなり、他方のアーム部材13Aは中空状の囲体13Cを有している。基端側の回動軸A1から先端側の回動軸A6に向けて配線18が設けられ、この配線18は囲体13C内に配置されている。
(もっと読む)
溶接ロボットにおけるワイヤ送給装置の設置方法、溶接ロボットにおけるワイヤ送給装置の設置構造及び溶接ロボット
【課題】ワイヤ送給装置から回転アームの内部空間を介して溶接用トーチ迄に配置されるトーチケーブルの変曲点を少なくでき、或いは内部空間から通過した部位の反り上がりを可及的に少なくできて溶接への悪影響を抑制できる溶接ロボットにおけるワイヤ送給装置の設置方法、設置構造、及び溶接ロボットを提供する。
【解決手段】
溶接ロボットにおいて、ワイヤ送給装置22のワイヤ送出口24がアッパアーム14の回転軸線14aの下方に位置され、回転軸線14aに対して斜め上方に向くように、かつ、ワイヤ送出口24に接続されるトーチケーブル30が内部空間SPにおいて、回転軸線14aを下方から上方へ交差するようにワイヤ送給装置22が設置されている。
(もっと読む)
作業ツールを備えたロボット
【課題】作業ツール管理装置を備えた前腕後部が上腕の内側を通過するアーム姿勢となるときであっても、線条体または作業ツール管理装置が上腕に干渉しないようにする。
【解決手段】ロボットの線条体処理機構において、作業ツール管理装置(34)に動力、信号および材料のうちの少なくとも一つを供給する作業ツール管理装置用線条体(50)は、旋回胴(12)に取付けられた側面とは反対側に位置する上腕(14)の側面において旋回胴から上腕の長手方向に沿って案内され、前腕(18)の前面(18b)に案内され、次いで上腕が取付けられている側面とは反対側に位置する前腕の側面を通って作業ツール管理装置(34)に接続されている。さらに、作業ツール管理装置用線条体は、前腕の側面または前面に取付けられた線条体中継部(39)により中継されて作業ツール管理装置に接続されている。
(もっと読む)
溶接ロボットシステム
【課題】加工効率が高い溶接ロボットシステムを提供する。
【解決手段】溶接ロボットシステム100は、軌条112に沿って往復運動を行う2組のポジショナ111a及び111bを有する搬送装置110と、この搬送装置110に加工対象物200を搬入及び搬出するコンベヤ部160と、加工対象物200に対し溶接を行う2組の溶接ロボット180a及び180bと、を備え、2組のポジショナ111a及び111bは、軌条112に沿って往復運動が可能で且つ旋回可能である旋回ギヤ124と、この旋回ギヤ124上に立設された支柱126と、この支柱126に沿って昇降運動が可能な昇降体139と、この昇降体139に対して垂直方向に固定された昇降フレーム140と、この昇降フレーム140の先端に取り付けられ水平方向及び垂直方向に回転可能であるエンドエフェクタと、を有している。
(もっと読む)
ロボットシステム
【課題】ロボットに取り付けられたスイベルジョイント及び作業用機器並びに配管を取り外すことなく、スイベルジョイントの消耗部品を容易に交換できるロボットシステムを提供することと。
【解決手段】ロボット本体(マニピュレータ)の手首部10にスイベルジョイント2を介して作業用機器9が取り付けられているロボットシステムにおいて、スイベルジョイント2の側方に、当該スイベルジョイント2の回動軸心と平行に軸体32を配設し、前記軸体32を支軸としてスイベルジョイント2を、使用時にあるべき位置から完全に位置ズレさせ得るようにしてある。
(もっと読む)
ロボットシステム
【課題】ロボットに取り付けられたスイベルジョイント及び作業用機器並びに配管を取り外すことなく、スイベルジョイントの消耗部品を容易に交換できるロボットシステムを提供すること。
【解決手段】ロボット(マニピュレータ1)の手首部10にスイベルジョイント2及び作業用機器3が取り付けられているロボットシステムにおいて、手首部10の回動力はスイベルジョイント2が配置される収容部分Kを迂回して作業用機器3側に伝達されるようにしてあり、前記スイベルジョイント2は前記収容部分Kから取り出し可能である。
(もっと読む)
工作機械、生産機械あるいはロボット
例えば多軸機械のような工作機械や生産機械の場合あるいはロボットの場合、本発明に基づいて、液体金属合金ジャーナル軸受は、電気的負荷に対する給電を伝達するために使用されるだけでなく、制御信号を発生するための電流を伝達するためにも使用される。それに応じて、液体金属合金ジャーナル軸受を介して、一方では、供給電流を発生するために600Vの電圧の印加が可能となり、他方では、制御信号を発生するために24Vの電圧の印加が可能となる。  (もっと読む)
(もっと読む)
ロボットシステム
【解決手段】ターンテーブルの回転軸から離れた位置にある軸を中心にして回転させることができるように、ターンテーブル上に軸回転可能に取り付けられているアームを有する、回転させることのできるターンテーブルを含んでいるロボットシステム。アームの回転軸は、ターンテーブルを基部上に支持する軸受よりも、ターンテーブルの回転軸の近くに配置されている。アームは、ターンテーブルの下方に位置する、アームの回転軸を横断する方向に伸張する部分を有している。ターンテーブルは、基部の上に、共通平面に位置する部分を有する単一の軸受によって支持されている。 (もっと読む)
産業用ロボット
【課題】アーム旋回量に制限のない低コストの産業ロボットを提供する。
【解決手段】本体部側から第1アーム20、第2アーム30及びハンドアーム40の順で連結され、そのハンドアーム40が一定方向に伸縮するように回動駆動するアーム部10と、そのアーム部10の伸縮動作を行う中空回動軸3及びこの中空回動軸3内にあって前記第1アーム10に連結して前記ハンドアーム40の伸縮方向を変化させる中実回動軸2を備えた本体部100とを有し、本体部100は、中実回動軸2の原点位置を検出する第1センサ4を有する第1センサ機構と、その中実回動軸2に設けられて中実回動軸2と中空回動軸3との相対的な原点位置を検出する第2センサ5を有する第2センサ機構とを有しており、中実回動軸2には、ロータリージョイント6が電気接続され、第2センサ5がこのロータリージョイント6に接続されている。
(もっと読む)
多関節搬送装置及びそれを用いた半導体製造装置
【課題】各モータの同期動作を容易に制御できると共に、省配線化及び小型化を実現できる多関節搬送装置を提供する。
【解決手段】複数のアーム22・・52が互いに関節を介して回転可能に連結され、前記関節に設置された複数のダイレクトドライブ方式のモータ210・・510を有し、該複数の各モータの駆動により前記各アームを回転させて最後の前記アームに搭載した被搬送体を搬送する多関節搬送装置において、前記各モータの制御に必要な電気信号を光信号に変換して伝達する制御装置111と、前記光信号を電気信号に変換すると共に電気信号を光信号に変換する信号変換器21・・41と、前記制御装置からの前記光信号を前記信号変換器に伝達する光通信手段113と、該信号変換器によって変換された前記電気信号によって前記各モータを駆動すると共に前記モータからの前記電気信号に基づいて前記各モータの駆動を制御する。
(もっと読む)
1 - 20 / 24
[ Back to top ]