
Fターム[3C007CY37]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 保守性向上 (110)
Fターム[3C007CY37]に分類される特許
1 - 20 / 110
溶接ロボットの一時停止解析装置および一時停止解析プログラム
【課題】様々な状況下におけるチョコ停の改善に寄与することができるとともに、経験と知識がない場合であってもチョコ停の対策を行う箇所を容易に特定することができる溶接ロボットの一時停止解析装置および一時停止解析プログラムを提供する。
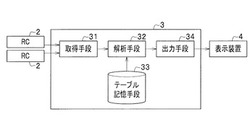
【解決手段】一時停止解析装置3は、ロボットコントローラ2から、ロボット位置情報と、ロボット動作情報と、溶接条件情報と、動作エラー情報と、を取得する取得手段31と、ロボット位置情報、ロボット動作情報、溶接条件情報および動作エラー情報と、これらに対応する一時停止の推定原因および一時停止の修正方法と、が予め記載されたテーブルを参照することで、溶接ロボット1の一時停止の原因とその修正方法を解析する解析手段32と、解析手段32が解析した解析結果を出力する出力手段33と、を備える。
(もっと読む)
基板搬送ロボット

【課題】真空処理装置内で使用される基板搬送ロボットであって、ロボットアームの関節部は、一方のアーム部材に形成した上下方向に貫通する軸支孔と、軸支孔に装着したベアリングと、他方のアーム部材に固定した、ベアリングに挿入される支軸とを備えるものにおいて、ベアリングでの発塵で生ずるパーティクルによる真空処理装置内の汚損を防止できるようにする。
【解決手段】一方のアーム部材311の下面に、軸支孔51を下方から覆うカバー7が着脱自在に取り付けられる。また、支軸53が他方のアーム部材321上方に突出する上部軸部53aを有し、一方のアーム部材311に、上部軸部53aが挿入される上部ベアリング55を装着した筒部54を設ける場合には、上部ベアリング55の内輪と他方のアーム部材321との間に介設するカラー57の下端に、外周に立上り部57bを有するフランジ部57aを形成する。
(もっと読む)
ロボット
【課題】ロボットにおいて、エンコーダデータを確実に保持しつつバックアップ用電池の交換作業の容易化を図る。
【解決手段】ロボットは、主電源部とロボット本体部と外部バックアップ電源部とを備える。ロボット本体部は、サーボモータと、エンコーダデータを記憶するエンコーダ部と、エンコーダ部にバックアップ電源を供給する内部電池を含む内部バックアップ電源部とを有する。外部バックアップ電源部は、ロボット本体部の外部に設けられ、エンコーダ部にバックアップ電源を供給する。主電源部による供給電圧Vsは外部バックアップ電源部による供給電圧Vbat1より大きく、供給電圧Vbat1は内部バックアップ電源部による供給電圧Vbat2より大きく、供給電圧Vbat2はエンコーダ部の最低動作電圧Vsysより大きい。
(もっと読む)
基板移載装置
【課題】ベルヌーイチャックで吸引保持した基板を、規制体で所定姿勢に位置保持する基板移載装置において、規制体の規制機能の回復をより少ない手間で簡便に行うことができるようにする。
【解決手段】基板Wの表面に平行な方向の滑り移動を規制するガイド53をガイド取付部材51に対して着脱自在に構成する。これにより、規制体50の全体の交換を要することなく、ガイド53のみを交換するだけで、規制体50の規制機能を回復することができる。従って、規制体50の全体を交換する形態に比べて、規制体50の規制機能の回復に要する費用や手間を抑えることができる。
(もっと読む)
マニピュレータ用関節部
【課題】作業効率の向上と組立てコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】軸受ユニット8のハウジング14には、ハウジング14の回転中心O2を通り径方向に延びる直線と略直交する平坦面14bが形成され、回動アームのユニット装着孔7には、外径側に窪む係止凹部7aが形成されている。ハウジング14の平坦面14bとユニット装着孔7の係止凹部7aとの間には、板状の係止部材30が設けられて、ハウジング14がユニット装着孔7に回転不能に固定される。
(もっと読む)
把持装置
【課題】被把持物と接触する接触部を交換する必要が生じたとき、圧力センサ全体を交換することなく、その接触部のみ交換できるようにする。
【解決手段】把持装置は、両側に電極22a,22bが設けられた圧電素子21を電極22a,22bに接続された1対のフレキシブル基板23a,23bで挟み込んで形成された圧電振動型圧力センサ20を、ワークを把持する把持部6の指先部6a及び中節部6bに圧電素子21と1対のフレキシブル基板23a,23bを把持部6の把持力方向に配置して備え、さらに、把持部6に着脱可能に設けられた耐油性、耐薬性の弾性を有するゴム製の保護層24を備えている。被覆部材の劣化、傷、摩耗、ヘタリが生じても、圧電振動型圧力センサ全体を交換する必要がなく、保護層24のみを交換できる。
(もっと読む)
ロボット
【課題】 減速機の温度が上昇しても減速機収納室の内圧が上昇することを防止して、減速機収納室内の潤滑剤が外部に流出することを防止できるロボットを提供すること。
【解決手段】 スカラロボットAにおいて、駆動装置32をフレーム部材31に連結固定し、駆動装置32によって駆動される減速機33の出力部35をフレーム部材21に連結固定して、フレーム部材21に対してフレーム部材31を回転可能に組み付けるとともに、減速機33を収納する減速機収納室内に潤滑剤を充填した。そして、潤滑剤の上面より上方となる減速機収納室の空間部33bの所定部から、この所定部より上方の上方点まで延びて減速機収納室を外部に連通させる圧抜き経路38とエアチューブ39をフレーム部材31に設け、エアチューブ39の途中にコイル部39aを形成した。
(もっと読む)
ロボット
【課題】
適切な性能を維持しながらも、より省コストに提供できるようにしたロボットを得ることを目的とする。
【解決手段】
基台と、第1軸まわりに回転可能に基台に連結される第1構造体と、第1軸に対して直交する第2軸まわりに回転可能に第1構造体に連結される第2構造体と、第2軸と平行な第3軸まわりに回転可能に第2構造体に連結される第3構造体と、を少なくとも有するロボットであって、第1構造体と第3構造体とは、同形状の鋳物材を用いて形成される。
(もっと読む)
ロボット
【課題】 可動部に設けられた押圧ローラおよび離間ローラの交換作業が容易になるロボットを提供すること。
【解決手段】 ロボットAに、開口15を備えたケース部材10と、開口15を塞ぐシャッタ50と、ケース部材10に移動可能に取り付けられたテーブル本体31と、テーブル本体31の移動方向の両側でシャッタ50を開口15の縁部側に押圧する押圧ローラ32aと、押圧ローラ32a間でシャッタ50を開口15の縁部から離間させる離間ローラ32bとを設けた。そして、テーブル本体31の一方側に設置される押圧ローラ32aと離間ローラ32bと、テーブル本体31の他方側に設置される押圧ローラ32aと離間ローラ32bとを一対の支持部材33で支持し、一対の支持部材33をそれぞれねじ37を用いてテーブル本体31の移動方向の一方側および他方側からテーブル本体31に対して着脱可能にした。
(もっと読む)
産業用ロボット用減速機
【課題】 即時の故障の予知を可能にすることができる産業用ロボット用減速機を提供する。
【解決手段】 減速機は、減速機本体と、減速機本体の潤滑油131aの劣化を検出するための潤滑油劣化センサ139aとを備えており、潤滑油劣化センサ139aは、白色の光を発する白色LED52と、受けた光の色を検出するRGBセンサ53と、潤滑油131aが侵入するための隙間である油用隙間40aが形成された隙間形成部材40と、白色LED52、RGBセンサ53および隙間形成部材40を支持する支持部材20とを備えており、隙間形成部材40は、白色LED52によって発せられる光を透過させ、油用隙間40aは、白色LED52からRGBセンサ53までの光路上に配置されていることを特徴とする。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔と、該ユニット装着孔に嵌合するハウジングと該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する転がり軸受とを有する軸受ユニットと、を備える。更に、長手方向における縦断面がテーパー状の係止部材は楔作用を発生し、回動アームとハウジングとを相対回転不能に固定する。係止部材は円周方向に複数本設けられている。
(もっと読む)
制御装置
【課題】組み立て工数の低減が可能な制御装置を提供する。
【解決手段】制御装置10は、筐体12と、筐体12に収納され、ケーブルが接続される接続口が設けられた内部機器と、ケーブルが配線され、作業者がケーブルの端部を接続口に接続することが可能な大きさの開口部H1〜H6が形成された枠体20と、筐体12と枠体20とを連結する連結部50a、50bとを備える。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アーム4の端部に形成されたユニット装着孔と、該ユニット装着孔に嵌合するハウジングと該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受とを有する軸受ユニット7と、を備える。更に、長手方向における縦断面がテーパー状の係止部材14は楔作用を発生し、回動アームとハウジングとを相対回転不能に固定する。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔と、該ユニット装着孔に嵌合するハウジングと該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受とを有する軸受ユニットと、を備える。ハウジングの外周面には、軸方向に沿う係止溝が形成されており、回動アームのユニット装着孔には、ハウジング側の係止溝と同形状の係止溝が形成され、両係止溝の間に係止部材が配置されている。
(もっと読む)
ロボットおよび2台以上のロボットの組み立て方法
【課題】個体差を小さくすることが可能なロボットを提供する。
【解決手段】このロボット100は、アーム支持部2と、アーム支持部2に関節部を介して連結される下腕部3と、関節部に配置され、下腕部3をアーム支持部2に対して回動可能に連結し、偏心ギア77a(77b)が噛み合い位置を移動させながら回転する減速機7bと、アーム支持部2に対する下腕部3の相対的な回転位置が所定の位置にあるとき、減速機7bの回転角度位置が所定の回転角度位置となるように位置合わせ可能な位置決め部21b、71d、72eおよび3bとを備える。
(もっと読む)
産業用ロボットの回転関節用配線装置
【課題】ロボットの高速動作に良好に追随しつつ主配線の断線についての事前検出ができ、しかも断線原因の解明に有効に寄与できるようにする。
【解決手段】主配線14−1、14−2及び断線事前検出用配線14−3は、FPCから構成されている。断線事前検出用配線14−3は主配線14−1、14−2と厚み方向で並ぶように設けられ、主配線14−1、14−2よりも僅かに早く断線するように設定されている。さらにこの断線事前検出用配線14−3は反転部Tでの位置が主配線14−1、14−2より外側としている。この結果、主配線14−1、14−2に発生したマイクロクラックが該断線事前検出用配線14−3に拡大された形態で現出する。
(もっと読む)
ロボットの回転関節用配線装置
【課題】ロボットの回転関節により結合される2つの部材間の配線としてフレキシブルプリント配線板を用いた構成において、過電流が流れた部分をその継続時間にかかわらず特定可能にする。
【解決手段】
ロボットの相対回転する各部材間にて電気信号を伝達するためのFPC板14の延長部14b、14cは、中間部分で切断された後、それぞれポリスイッチ71〜74が搭載された基板61、ポリスイッチ75〜78が搭載された基板64を介して再接続される。熱感応シール60は、ポリスイッチ71〜78から離れたところに位置するFPC板14の延長部14aの表面におけるコネクタ33との接続部分に貼り付けられる。熱感応シール60は、全ての導電線27を覆うようにして配置される。熱感応シール60は、導電線27に過電流が流れたとき、その導電線27が発する熱により感応するように検知温度が設定されている。
(もっと読む)
産業用ロボット内部の線条体の配線方法
【課題】線条体を産業用ロボット外部に露出させることなく産業用ロボット内部に配線することができ、かつメンテナンス時に線条体を容易に交換することが可能な、産業用ロボット内部の線条体の配線方法を提供する。
【解決手段】まず、基端側線条部材21の一端21aを基台11に接続し、基端側線条部材21の他端21bを、基台11から第1の収納室12を通って、第1のロボット腕13まで配線する。次に、先端側線条部材22の一端22aを、第1のロボット腕13から第2の収納室14を通って第2のロボット腕15まで配線し、さらに先端側線条部材22の一端22aを手首部16に接続する。その後、基端側線条部材21の他端21bと、先端側線条部材22の他端22bとをコネクタ23によって接続する。
(もっと読む)
ロボットアーム
【課題】トランスファーチャンバ内の汚染を抑制することができるロボットアームを提供する。
【解決手段】ロボットアーム100は、半導体ウエハを搬送するロボットアームであり、ハンド2と前腕リンク10と上腕リンク14を備えている。ハンド2は、第1関節20を介して前腕リンク10に連結している。上腕リンク14は、第2関節11を介して前腕リンク10に連結している。ロボットアーム100では、前腕リンク10が、第1関節20と第2関節11の間で分割可能に構成されている。
(もっと読む)
産業用ロボットのエンドエフェクタ取付用フランジの油止め構造
【課題】フランジ部分におけるゴム製シール部材から滲出した潤滑油がエンドエフェクタやワーク等に付着することを防止する。
【解決手段】内輪16aと外輪16bの間にはオイルシール25が設けられ、油吸収部材26がオイルシール25外側端面を塞ぐように設けられている。この油吸収部材26は、合成樹脂製で可撓性を有する帯状のホルダ27と、合成樹脂製で帯状の結束バンド28とで取り付けられている。ホルダ27は、ホルダ本体27aに多数の櫛歯板部27bを有し、さらに、断面凸状のビード部27cを有する。このビード部27cを外輪16bの第1の外輪部16b1及び第2の外輪部16b2の接合部外周部に存在する環状凹部16kに嵌合させた形態で、ホルダ27を外輪16bに巻回して櫛歯板部27bを油吸収部材26の端面に当て、結束バンド28により外輪16bに締付固定する。
(もっと読む)
1 - 20 / 110
[ Back to top ]