
Fターム[3C007GS02]の内容
マニピュレータ、ロボット (46,145) | 把持装置交換 (231) | 接合手段 (126) | ボール式 (23)
Fターム[3C007GS02]に分類される特許
1 - 20 / 23
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
(もっと読む)
ロボットハンド

【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制する。
【解決手段】組立ロボットは、ロボットアーム、ロボットハンド2および制御部を備え、ロボットハンド2は、ワークを把持する把持部、および、把持部に駆動用の圧縮エアを供給する電磁弁33を備える。組立ロボットでは、把持部制御信号が制御部からロボットハンド2の無線通信部35へと無線にて送信され、把持部によるワークの把持状態を示す把持状態信号が、無線通信部35から制御部へと無線にて送信される。このため、制御部とロボットハンド2との間において、把持部制御信号および把持状態信号の送受信用の配線が不要となる。このように、ロボットハンド2に接続される配線を削減することにより、配線によりロボットハンド2やロボットアームの可動範囲が制限されてしまうことを抑制(または防止)することができる。
(もっと読む)
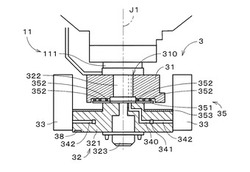
ロボットハンド
【課題】ロボットハンドにて簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断する。
【解決手段】ロボットハンドでは、ハンド本体部3と把持部を有するハンド先端部4とが着脱自在である。ハンド本体部3は、第2穴部352、第2穴部352内に設けられる摺動部38および付勢部39、把持部の駆動用の流体が流れる第2流体流路342、並びに、把持部からの信号が伝送される伝送経路37を有する。これらの流路および経路の一部は摺動部38に形成される。ハンド先端部4の非装着時には、摺動部38が付勢部39に付勢されて遮断位置に位置し、これらの流路および経路が遮断され、ハンド先端部4の装着時には、ハンド先端部4により押されて摺動部38が接続位置に位置し、これらの流路および経路が摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37が遮断される。
(もっと読む)
ツール交換機構及び調整方法
【課題】 ツールの重量やロボットの許容負荷能力に合わせて把持力や離脱力を簡単に調節できる小型のツール交換機構を提供することを課題とする。
【解決手段】 第1のツールチェンジャ2Aは係合凸部22を有する。係合凹部22は、等角度で配列された奇数本の調整孔22aと、調整孔22aにそれぞれ配置されたボールプランジャ25とを有する。第2のツールチェンジャ2Bは係合凸部22が挿入される係合凹部43を有する。係合凹部43は、ボールプランジャ25のボール25aが係合するV溝44aを有する。調整孔22aの各々のボールプランジャ25が配置されていない端部は、係合凸部22の外周面に開口している。
(もっと読む)
マニピュレータのツール保持具
【課題】チャックを垂直状態で保持する際に、マニピュレータ自体や周辺機械の振動、作業者の接触等によりツールが離脱したり、ツールを一定の姿勢で長期にわたって安定的に保持する。マニピュレータに対してツールを正確に位置出しした状態で装着してツール自動交換を可能にする。
【解決手段】起立面に水平方向へ軸線を有して突出するセンター軸及び該センター軸から離間した位置にて水平方向に軸線を有して突出する位置決め軸を設けた固定側保持部材と、ツールに固定され、上記センター軸及び位置決め軸を軸支する軸支孔をそれぞれ有した可動側保持部材とからなると共に固定側保持部材における可動側保持部材の相対面に磁気吸着部材を設ける。
(もっと読む)
ツール収納機構及びツール収納方法
【課題】 ツールホルダの収納位置までツール及びツールチェンジャを確実に案内することのできるツールホルダを提供することを課題とする。
【解決手段】 ツールチェンジャ2Bを固定するツール8をツールホルダ50の収納位置に収納する。ツールチェンジャ2Bのガイド部46とツールホルダ50の一対のガイド受け54a、54bとで形成される第2の位置決め機構の位置決め精度は、ツールチェンジャ2Bの位置決め孔とツールホルダ50の位置決めピン52aとで形成される第1の位置決め機構の位置決め精度より低く設定される。
(もっと読む)
把持装置
【課題】把持装置の駆動装置を大型化することなく、寸法が異なる複数種類の対象物を把持できるとともに、把持する対象物の種類を変更する場合の対応時間を短縮ことができる把持装置を提供する。
【解決手段】寸法が異なる複数種類の対象物1、2を把持して移動させる把持装置10。対象物1、2を把持するように駆動される把持部3と、把持部3が動作可能に把持部を保持する保持体5と、把持部3に装着可能なアタッチメント7と、を備える。把持部3は、アタッチメント7が装着されていない時には、第1種類の対象物1を把持可能であり、アタッチメント7が装着されている時には、アタッチメント7を介して第2種類の対象物2を把持可能である。
(もっと読む)
ローラツールの着脱機構
【課題】ローラが用いられて行われる作業の自動化を図るための構成において、ローラの交換を簡易的に行うことができ、高い汎用性を得ることができるローラツールの着脱機構を提供する。
【解決手段】ツール本体11にローラ12を支持するローラツール10は、交換台30に対する着座面となる突部下面21と、突部下面21とは反対側を向く面である突部上面22とを有し、交換台30は、突部下面21が接触する面である座面41と、座面41に対向する面である天井面42とを有し、交換台30に着座した状態のローラツール10が、所定の支持機構との関係における近接移動を、座面41による支持によって受けることで、ローラツール10の支持機構に対する取付けが行われ、交換台30に着座した状態のローラツール10の、支持機構との関係における離間移動が、天井面42によって規制されることで、ローラツール10の支持機構からの取外しが行われる。
(もっと読む)
ロボットハンド
【課題】ロボットハンドの周りに配置されるハンド着脱手段およびチャックへのエアー供給用の外部配管構成を簡素化できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、エアーEfを用いたシリンダCLの駆動によってワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。ハンド本体部31は、エアーEfを用いたシリンダ380の駆動によりハンド先端部32の着脱を行う着脱部38を有し、外面に設けられたエアー入口開口350から供給されるエアーEfをエアー溜め5eに溜める。そして、エアー溜め5e内のエアーEfがチャック4のシリンダCLおよび着脱部38のシリンダ380に供給される。これにより、ロボットハンド3の周りに配置される着脱部38およびチャック4へのエアー供給用の外部配管構成を簡素化できる。
(もっと読む)
ロボットハンド
【課題】チャックの把持制御に用いる電磁弁の有効利用が図れてコストダウンに寄与できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、ハンド本体部31に着脱自在で、エアーEfを用いたシリンダCLの駆動によってワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。そして、ハンド本体部32は、外面に設けられたエアー入口開口350を始端とする1本の流路35pからエアーEfが供給される流路5pの終端に接続する入力ポートと、ハンド本体部31の内部に形成された流路5q、37pを介してハンド先端部32にエアーEfを供給する出力ポートとを備えた電磁弁50を有している。これにより、別個のハンド先端部32間でハンド本体部31の電磁弁50の共有化が促進されるため、電磁弁50の有効利用が図れてコストダウンに寄与できる。
(もっと読む)
ロボットハンド
【課題】ロボットハンドの周りに配置されるチャックへのエアー供給用の外部配管を削減できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、エアー駆動によりワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。このロボットハンド3の内部には、外面に設けられた1つのエアー入口開口350を始端とする1本の流路35pから、電磁弁50の入力ポートに終端が接続した流路5pにエアーを供給する経路が形成されるとともに、電磁弁(切換弁)50の出力ポートからチャック取付け面320のエアー出口開口32jまで各流路5q、37p、32pが形成されている。このようなロボットハンド3の内部配管を設けることにより、ロボットハンド3の周りに配置されるチャック4へのエアー供給用の外部配管を削減できる。
(もっと読む)
ロボット装置
【課題】ロボット装置において、装置構成の複雑化、大型化、重量増加を招来することなく、さまざまな形状の作業対象物について把持等の作業を行うことができるようにし、また、作業対象となるワークを把持したときの荷重方向について把持爪を支える力を十分に確保し、重いワークを把持することができるようにする。
【解決手段】把持爪6が着脱可能となっている把持機構5を有するマニピュレータ1を備えたロボット装置であって、把持手段5は、2本以上の把持爪6が装着され、装着された各把持爪6を相対的に接離させる方向に移動操作することにより、各把持爪6により、作業対象となるワーク201を把持し、または、解放する機能を有し、各把持爪6が把持機構5に対してワーク201を把持するための移動方向に移動されたときに、各把持爪6に係合してワーク201を把持したときのワーク201による荷重を支持する保持部材7を備えた。
(もっと読む)
ツール取替装置
【課題】ツールの衝突等を検知することができ、電力の供給が停止しても、ツールを保持することができ、かつ、ツールの着脱が容易であって、ツールを移動させるロボットアームの動作の正確性を高めることができるツール取替装置を提供することを課題とする。
【解決手段】本発明は、ケース部材10を有するツール取替1であり、ケース10部材内において、保持部材20と可動部材30との間に支持された係合ボール29が、第2バネによって付勢される可動部材30に形成された押出面により、係合ボール29が保持部材20内に突出してツールが係合可能となる。
また、第2バネの付勢力に逆らって可動部材30を押圧することで、係合ボール29が可動部材30内に移動可能となることを特徴とする。また、ツールを保持する保持部材20の移動距離を検出するショックセンサ40を設けていることを特徴とする。
(もっと読む)
電気部品保持装置
【課題】保持爪により電気部品を保持して搬送する電気部品保持装置において、保持爪を電気部品に合わせて容易に交換し得るようにする。
【解決手段】チャック本体としての取付部材366に、2つの可動子374,376を備えたリニアモータ370を取り付け、各可動子374,376にそれぞれ保持爪398,399を取付装置により着脱可能に取り付けて、リニアモータチャック362を構成する。そのチャック362に電気部品480を保持させ、昇降装置とXY移動装置とにより水平なXY平面内の任意の位置へ移動させるとともに、鉛直方向に昇降させる。XY移動装置の下方に爪収容装置を設け、その爪収容装置とチャック362との間において、保持すべき電気部品に合わせて、自動で保持爪398,399の交換を行わせる。
(もっと読む)
ロボットアームカップリング装置の脱落防止装置
【課題】ロボット用ATCにおいて脱落防止機能を向上した流体圧回路を提供する。
【解決手段】着脱機構における係合構造がツールプレートを装着した状態にて、ツールプレート側の重量が分離方向の負荷となって働く構造であって、 着脱制御用の着脱シリンダはマスタプレート側に設けられており、ヘッド側を結合室、ロッド側を分離室とした2室構造であり、流体圧回路は、加圧流体供給源と前記着脱シリンダの間に形成され、途中に電磁切換バルブが設けられ、さらに、当該電磁切換バルブと前記分離室側の回路の途中に一つの脱落防止検出弁が設けられており、当該脱落防止検出弁は、マスタプレートとツールプレートの関係状態を検出する機構によって弁の位置が規制されるものである。
(もっと読む)
ロボットアームカップリング装置の脱落防止装置
【課題】ロボットアームカップリング装置の脱落防止装置の加圧流体圧回路を改良する。
【解決手段】稼働状態ではツールの重量等が分離方向に作用するカップリングの構造において、誤動作などに伴う脱落危険を回避する機構として、流体圧回路に分離圧が負荷されないように機械的に固定する機構を一つのバルブ構造にて実現したものであって、脱落危険を回避し、安全性を向上させたロボットアームカップリング装置の脱落防止装置をシンプルな機構にて実現するものであって、この安全バルブをバルブ操作する機構として、ツールプレートを検知してスプールを操作する機構とツール置き台を検知してバルブ本体側を操作する機構を別々に設けるこにより、2ポジション切替バルブを活用して脱落防止機構を実現。
(もっと読む)
ロボットアームカップリング装置
【課題】効率的なツール交換手段を提供すること。
【解決手段】ロック用ボール13間に位置するボール支持部材11に、カム部材17の移動方向と直交する方向へ移動可能に支持される突出し用ボール15と、ロック用傾斜溝17a間に位置するカム部材17の外周面に設けられ、ロック用傾斜溝17aと反対方向に傾斜する複数の解除用傾斜溝17bと、ロック用係合溝23a間に位置するボール受け部材23に設けられ、ロック用係合溝17aと反対方向に傾斜する複数の突出し用傾斜溝23bとからなる突出し手段を備える。アーム側アタッチメント3の本体7には、アーム側流体通路が連通する装着孔7b内にて軸線方向へ移動可能で、装着孔7bの吐出口部を開閉する開閉部材7fを設ける。ツール側アタッチメントには、吐出口部を通過して装着孔7b内に進入可能で、ツールの流体機器に接続されるツール側流体通路23aが形成された接続口部23bを設ける。
(もっと読む)
ロボットアームカップリング装置
【課題】結合面が水平方向以外を向く場合であっても、良好に動作する自動ツール交換を提供すること。
【解決手段】ロック解除位置からロック位置に対するカム部材17の移動に伴ってロック用傾斜溝17aを摺接して半径方向外側へ移動するロック用ボール13を係合用傾斜溝23aに係合してアーム側アタッチメント3及びツール側アタッチメント5相互を連結する一方、ロック位置からロック解除位置に対するカム部材17の移動に伴って係合用傾斜溝23aに対するロック用ボール13の係合を解除すると共に突出し用傾斜溝17bを摺接して半径方向外側へ移動するロック解除用ボール15を離脱用傾斜溝23bに摺接してアーム側アタッチメント3からツール側アタッチメント5を突出し可能にする。
(もっと読む)
ロボットツールチェンジャ
互いに連結されるように構成されたマスターユニット及びツールユニットを有するロボットツールチェンジャ。ロボットツールチェンジャのマスターユニットには、ロック位置とロック解除位置との間で移動可能であるピストンが移動可能に搭載される。ピストンは、ロック解除面、フェイルセーフ面及びロック面を有する接触領域を含む。保持領域の内部に含まれる一連の転がり部材が更に設けられ、転がり部材は、マスターユニットをツールユニットにロックするためにピストンにより作動される。例えば、ピストンは転がり部材と係合し、ツールユニットの一部を形成する軌道輪とロックされた関係になるように転がり部材を押圧する。ピストンが不慮の事態により又は偶発的にロック位置からロック解除位置へ動くのを防止するために、通常ピストンのロック面とロック解除面との間に配置され、ピストンがロック位置からロック解除位置まで移動する場合に、ピストンの移動を抑制する抑制面がピストンに設けられる。  (もっと読む)
(もっと読む)
ロボットハンド
【課題】産業用ロボットの腕に着脱自在なロボットハンドに関する部品点数を削減する。
【解決手段】ロボットハンド3は、ロボットの腕に連結するための特定の構造を有する連結部31と、連結部31に接続するハンド本体部32と、ハンド本体部32の先端部に取付けられてワーク9を把持するチャック部33とを備えている。そして、連結部31とハンド本体部32とは、一体部位30として一体的に成形されている。これにより、ロボットハンド3に関する部品点数を削減できる。
(もっと読む)
1 - 20 / 23
[ Back to top ]