
Fターム[3C007GS11]の内容
マニピュレータ、ロボット (46,145) | 把持装置交換 (231) | 給電、流体供給のためのジョイント (34)
Fターム[3C007GS11]に分類される特許
1 - 20 / 34
マニピュレータ
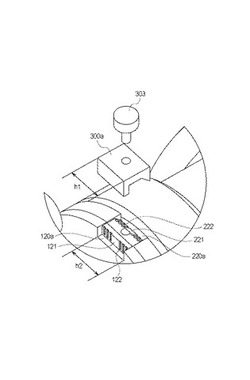
【課題】 従来のロボットアームとエンドエフェクタの電気接続接点には、加圧用のスプリングやテコのような機構が必要であったためエンドエフェクタが大きくなり、小型の部品を組み付けるための小型マニピュレータには不向きであった。
【解決手段】 上述の課題を解決するための本発明は、第一の電気接点部(222)を備えた付き当て面(121)を有するロボットアーム(201)と、第二の電気接点部(122)を備えた付き当て面(221)を有する前記ロボットアームに接続されるエンドエフェクタ(1)と、接点配線を配したクサビ状空隙を備え前記付き当て面を係合する着脱可能な係合部材(300)と、を有し、前記ロボットアームと前記エンドエフェクタとを前記係合部材により係合させることで前記ロボットアームと前記エンドエフェクタとが電気的に導通することを特徴とするマニピュレータである。
(もっと読む)
ロボットハンド

【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制する。
【解決手段】組立ロボットは、ロボットアーム、ロボットハンド2および制御部を備え、ロボットハンド2は、ワークを把持する把持部、および、把持部に駆動用の圧縮エアを供給する電磁弁33を備える。組立ロボットでは、把持部制御信号が制御部からロボットハンド2の無線通信部35へと無線にて送信され、把持部によるワークの把持状態を示す把持状態信号が、無線通信部35から制御部へと無線にて送信される。このため、制御部とロボットハンド2との間において、把持部制御信号および把持状態信号の送受信用の配線が不要となる。このように、ロボットハンド2に接続される配線を削減することにより、配線によりロボットハンド2やロボットアームの可動範囲が制限されてしまうことを抑制(または防止)することができる。
(もっと読む)
ロボットハンド
【課題】ロボットハンドにて簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断する。
【解決手段】ロボットハンドでは、ハンド本体部3と把持部を有するハンド先端部4とが着脱自在である。ハンド本体部3は、第2穴部352、第2穴部352内に設けられる摺動部38および付勢部39、把持部の駆動用の流体が流れる第2流体流路342、並びに、把持部からの信号が伝送される伝送経路37を有する。これらの流路および経路の一部は摺動部38に形成される。ハンド先端部4の非装着時には、摺動部38が付勢部39に付勢されて遮断位置に位置し、これらの流路および経路が遮断され、ハンド先端部4の装着時には、ハンド先端部4により押されて摺動部38が接続位置に位置し、これらの流路および経路が摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37が遮断される。
(もっと読む)
ワーク搬送装置におけるハンド着脱機構
【課題】ハンドの着脱が簡単で、耐久性に優れたワーク搬送装置におけるハンド着脱機構を提供する。
【解決手段】ロボット先端部に、ハンド装脱着用の前後スライド溝21を設けたホルダイケール20を固定し、ホルダイケール20に内蔵した流体圧シリンダの駆動で、摺動ピストンが前後スライド溝21に挿入したハンドユニット40の基端部を押圧固定するワーク搬送装置におけるハンド着脱機構であって、先端係合用のV字ブロック24と、摺動ピストンに一体化したロックピン28とを前後スライド溝21内に前後に離間して設け、ハンド基端部の挿入端側にスリット44を設けて二股状端部43を構成し、二股の付け根側上面にロックピン28の先端のすり鉢状ブロック29と係合するテーパ状係合部45を設けた。
(もっと読む)
産業用ロボット
【課題】本発明は、揺動アームと、揺動アームに回転軸を介して取り付けられるツール取付回転アームとを備えた産業用ロボットに関し、ツール取付部に気体を供給する流通路の外部構造物への干渉を防止できる産業用ロボットを提供することを課題とする。
【解決手段】本発明は、ツール取付部170に駆動用の気体を供給する流通路200を、ロボットベース110から旋回フレーム120、チューブ220、ショルダ140、揺動アーム150、ツール取付回転アーム160の内部を通ってツール取付部170まで配置したことを特徴とする
(もっと読む)
スイベルジョイント
【課題】流体を案内するホースを回転動作の支障とならないように省スペースに収容しながら、簡易な構成で流体の流れを安定させることができるスイベルジョイントを提供する。
【解決手段】スイベルジョイント1は、固定部10と、軸部30を有し仮想的な中心軸を中心として固定部10に対して相対的に回転運動する回転部11と、中心軸に略直交する平面に沿って軸部30を渦巻き状に取り巻く第1の渦巻部71を有するとともに、固定部10と回転部11との間で流体を案内するホース32とを備えている。第1のホース61は、第1の渦巻部71の径内側の端部から軸部30の外周表面に沿って第1の渦巻部71と同じ巻き方向に螺旋状に延びる第1の螺旋部81を有している。
(もっと読む)
ロボットのアーム連結装置
【課題】小型化を図るとともに関節の可動範囲を拡大することができるロボットのアーム連結装置を提供する。
【解決手段】ロータリジョイント37は、ハウジング10に固定されたスリーブ17の円筒内に回転可能な状態で挿入されたシャフト15を介して駆動源12の回転力を第2の上アーム6に伝達するとともに、第1の上アーム5側から供給される圧縮空気をスリーブ17とシャフト15との間に設けられた空気通路を通じて第2の上アーム6側に排出する。回転関節用配線装置20は、スリーブ17の外周を囲むように設けられた筒状をなすケース41と、ケース41の内周に沿ってスパイラル状に緩く巻かれた状態で収容されたフラットケーブル42とから構成される。第1の上アーム5側から供給される電気信号は、回転関節用配線装置20のフラットケーブル42を通じて第2の上アーム6側へと伝達される。
(もっと読む)
ロボットのアーム連結装置
【課題】ゴムホースによることなく、アーム間の回転を吸収可能な空気通路を構成する。
【解決手段】手首部に設けられたモータの回転をフランジに伝えるシャフト13に給気用環状溝23、排気用環状溝24を形成し、シャフト13に嵌合されたスリーブ17に両環状溝23,24に連通する中継路19,20を形成してこれら中継路25,26に手首部に設けられた給気用管路15と排気用管路16を接続する。また、シャフト13に両環状溝23,24に連通する中継路25,26を形成してこれら中継路25,26にフランジ8に設けられた給気用接続管29と排気用接続管30を接続する。Oリング溝36,38については、外側の隅角部Aの曲率半径を大きくして応力集中を緩和し、且つ隅角部A側に補填リング42,43を嵌める。
(もっと読む)
被把持体の把持装置
【課題】本発明は、被把持面と前記被把持面と交わる端面を有する柱状の被把持体を把持する把持装置であって、鉛直軸に沿い長軸が配置される前記被把持体の被把持面を把持する把持部と、前記被把持体の端面が当接する当接部を有する把持装置において、被把持体を所望の姿勢で把持可能なコンパクトな被把持体の把持装置を提供することを目的としている。
【解決手段】本発明に係わる被把持体の把持装置は、被把持面と前記被把持面と交わる端面を有する柱状の被把持体を把持する把持装置であって、鉛直軸に沿い長軸を位置決めすべき前記被把持体の被把持面を開閉して把持する把持部と、前記被把持体の端面が当接する当接部と、前記被把持体の端面と前記当接部を離接させるとともに前記当接部と前記被把持体の端面との間に所定の間隙を形成する間隙形成部とを有することを特徴とする被把持体の把持装置である。
(もっと読む)
特にロボット工学のための多軸継手、継手アセンブリおよびロボット工学のためのキット
【課題】特にロボット工学のための多軸継手(1)を提供する。
【解決手段】多軸継手は、回転軸(P)を備えた少なくとも1つの回転ピボット継手(26)とピボット継手(26)と直列に接続されかつ回転軸(P)に垂直に延在する旋回軸(R)を有する少なくとも1つの回転スイベル継手(13)とを介して互いに軸回転可能かつ旋回可能に接続された遠位継手部(2)と近位継手部(4)とを含む。そのような多軸継手を用いて2自由度を実現化することが可能である。小型の構造形状を得るために、ピボット継手(26)とスイベル継手(13)とは、互いの中に摺動されることによって合体されて、構造ユニットを形成する。多軸継手(1)は、動物またはヒトの関節の運動をシミュレートするために牽引手段を介した操作を可能にすることを特に意図されている。大きな力を吸収するために、分岐された構造(28)が選択されてもよい。
(もっと読む)
ロボットハンド
【課題】チャックの開閉を検出するセンサに接続される電線の断線の可能性を低減させるロボットハンドを提供する。
【解決手段】ロボットハンドは、産業用ロボットのアームに装着されるハンド本体部31と、ハンド本体部31に接続されるとともに、被把持物を把持するチャック4の取付けが可能なハンド先端部32とを備え、ハンド先端部32は、チャック4に設けられ当該チャック4の動作を検出可能なセンサSNに電線84を介して接続される副プリント基板64を有し、ハンド本体部31は、副プリント基板64と電気的に接続される主プリント基板61を有している。
(もっと読む)
ロボットハンド
【課題】ロボットハンドの周りに配置されるハンド着脱手段およびチャックへのエアー供給用の外部配管構成を簡素化できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、エアーEfを用いたシリンダCLの駆動によってワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。ハンド本体部31は、エアーEfを用いたシリンダ380の駆動によりハンド先端部32の着脱を行う着脱部38を有し、外面に設けられたエアー入口開口350から供給されるエアーEfをエアー溜め5eに溜める。そして、エアー溜め5e内のエアーEfがチャック4のシリンダCLおよび着脱部38のシリンダ380に供給される。これにより、ロボットハンド3の周りに配置される着脱部38およびチャック4へのエアー供給用の外部配管構成を簡素化できる。
(もっと読む)
ロボットハンド
【課題】チャックの把持制御に用いる電磁弁の有効利用が図れてコストダウンに寄与できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、ハンド本体部31に着脱自在で、エアーEfを用いたシリンダCLの駆動によってワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。そして、ハンド本体部32は、外面に設けられたエアー入口開口350を始端とする1本の流路35pからエアーEfが供給される流路5pの終端に接続する入力ポートと、ハンド本体部31の内部に形成された流路5q、37pを介してハンド先端部32にエアーEfを供給する出力ポートとを備えた電磁弁50を有している。これにより、別個のハンド先端部32間でハンド本体部31の電磁弁50の共有化が促進されるため、電磁弁50の有効利用が図れてコストダウンに寄与できる。
(もっと読む)
ロボットハンド
【課題】ロボットハンドの周りに配置されるチャックへのエアー供給用の外部配管を削減できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、エアー駆動によりワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。このロボットハンド3の内部には、外面に設けられた1つのエアー入口開口350を始端とする1本の流路35pから、電磁弁50の入力ポートに終端が接続した流路5pにエアーを供給する経路が形成されるとともに、電磁弁(切換弁)50の出力ポートからチャック取付け面320のエアー出口開口32jまで各流路5q、37p、32pが形成されている。このようなロボットハンド3の内部配管を設けることにより、ロボットハンド3の周りに配置されるチャック4へのエアー供給用の外部配管を削減できる。
(もっと読む)
可動部のハーネスレス装置
【課題】より優れた信頼性と耐久性をもって電気信号の伝送を行なうことの出来る、新規な構造の可動部のハーネスレス装置を提供すること。
【解決手段】部分コア部材40を円周上で相互に離隔して複数配置して形成した第一のコア部材36を第一の部材22に取り付ける一方、該部分コア部材40の周方向離隔距離の最大値よりも大きい周方向長さを有する第二のコア部材62を該第一の部材22に対して回動軸26回りに回動可能に取り付けられた第二の部材24に取り付けて、該第一のコア部材36と該第二のコア部材62を該回動軸26の軸方向で所定距離を隔てて該回動軸26回りで相対回動可能にすると共に、該第二のコア部材62が何れの周方向位置においても複数の該部分コア部材40の少なくとも一つに対して対向状態とされるようにした。
(もっと読む)
自動工具交換装置用モジュール
【課題】第一の連結部材と第二の連結部材間において伝送効率の低下を防ぎつつ、より高い信頼性をもって電気信号の伝送を行なうことの出来る、新規な構造の自動工具交換装置用モジュールを提供すること。
【解決手段】伝送面60を除くコア部材54の外周に電磁遮蔽部材50を配設すると共に、該コア部材54と該電磁遮蔽部材50との間に該電磁遮蔽部材50よりも低い電磁遮蔽効果を有するギャップ部材56を介在せしめ、コイル部材52、コア部材54、ギャップ部材56を含んで構成されたコイルヘッド46,82を備えたコイルユニット44,80を第一のモジュール30aおよび第二のモジュール30bにそれぞれ設けた。
(もっと読む)
ロボットハンドユニット
【課題】エアーの供給経路及び電気回線の分岐をロボットハンドユニットの回転部分に於いて行うことにより、固定フランジ側の複雑化、重量化を招くことなくエアーの供給経路及び電気回線を必要数確保する。
【解決手段】固定フランジ3のエアーの移送路22を回転軸4の連通路24と接続し、この連通路24をマニホールド31を介して複数の分岐流路26に分岐し、この分岐流路26を電磁弁34を介してロボットハンド6と接続して、各ロボットハンド6にエアーを供給可能とする。固定フランジ3に給電部35を固定し、給電部35を回転軸4の受電部37と接続回線38を介して接続する。受電部37に於いて、接続回線38を複数の分岐回線58に分岐し、この分岐回線58をロボットハンド6に接続する。
(もっと読む)
ツール取替装置
【課題】ツールの衝突等を検知することができ、電力の供給が停止しても、ツールを保持することができ、かつ、ツールの着脱が容易であって、ツールを移動させるロボットアームの動作の正確性を高めることができるツール取替装置を提供することを課題とする。
【解決手段】本発明は、ケース部材10を有するツール取替1であり、ケース10部材内において、保持部材20と可動部材30との間に支持された係合ボール29が、第2バネによって付勢される可動部材30に形成された押出面により、係合ボール29が保持部材20内に突出してツールが係合可能となる。
また、第2バネの付勢力に逆らって可動部材30を押圧することで、係合ボール29が可動部材30内に移動可能となることを特徴とする。また、ツールを保持する保持部材20の移動距離を検出するショックセンサ40を設けていることを特徴とする。
(もっと読む)
ウエハ検出装置及びウエハ搬送装置
【課題】ウエハ搬送用のハンドが180°回転する構成のウエハ搬送装置において、ハンドに設けられたウエハ検出用のセンサ部の検出情報を本体側に支障なく伝達することを可能にする。
【解決手段】ウエハ搬送装置11は、本体13に対して回動軸21を介してハンド14が回動可能に支持され、ハンド14には第1光ファイバ及び第2光ファイバが、その第1端部が本体13と対向する位置で、かつ回動軸21に対して対称位置に配置され、第2端部が載置部19に載置されたウエハに光を出射及び反射光を受光可能に設けられている。本体13には、ハンド14が第1状態又は第2状態に配置された状態において、前記両光ファイバの第1端部の端面と対向する位置に投光部30及び受光部31が配置されている。ウエハの検出手段は、受光部31の受光量に基づいてウエハの検出を行う。
(もっと読む)
1 - 20 / 34
[ Back to top ]