
Fターム[3C007KS32]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | すべり (31)
Fターム[3C007KS32]に分類される特許
1 - 20 / 31
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
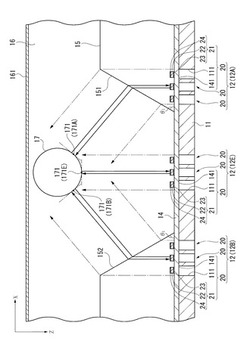
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜16と、弾性膜16の内部に設けられ、弾性膜16が弾性変形すると、その変形に応じて位置が移動する超音波反射体17と、複数の超音波素子20をアレイ状に配列したアレイ構造を有し、基板11の表面に対して直交する方向に平面波として伝搬する超音波を発信する超音波アレイ12と、基板11上に設けられ、超音波アレイ12から発信された超音波を、超音波反射体17に向かう方向に屈折させる音響レンズ15と、各超音波アレイ12の超音波の発信および受信を制御する制御部と、を備えた。
(もっと読む)
超音波センサー、触覚センサー、および把持装置

【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
滑り覚検知装置及び滑り覚検知方法
【課題】力覚センサを用いて滑り覚を検知する滑り覚検知装置及び滑り覚検知方法を提供する。
【解決手段】部品Pと接触部R4との間に生じた滑りを検知する滑り覚検知装置であって、歪検出用抵抗素子Sを用いて接触部R4に印加された外力Fを検出する力覚センサ1と、歪検出用抵抗素子Sに所定周波数の初期信号を入力する信号入力部9と、歪検出用抵抗素子Sからのセンサ出力信号Vs’を周波数解析する周波数解析部62と、周波数解析部62において検出された周波数成分のうち、初期信号の周波数成分と異なる周波数成分の強度が閾値を超える場合は、部品Pと接触部R4との間に滑りが生じたと判定し、初期信号の周波数成分と異なる周波数成分の強度が閾値以下である場合は、部品Pと接触部R4との間に滑りが生じていないと判定する滑り覚判定部63と、を備える。
(もっと読む)
把持判別装置および把持判別方法
【課題】把持対象である物体が把持可能であるか否かを正確に判定することが可能な把持判別装置を提供する。
【解決手段】本発明の把持判別装置は、把持対象である物体を把持部によって把持した状態で、把持部を移動させる目標軌道を生成する計画部と、目標軌道に基づいて駆動された把持部の動きを計測する観測部と、目標軌道から導出される把持部の目標値および観測部により計測された実測値に基づいて、把持対象である物体が把持可能であるか否かを判別する把持状態判別部と、把持状態判別部による判別結果に基づいて、把持部の把持する物体の把持状態を変更する把持状態変更部と、を備える。
(もっと読む)
応力検出素子、触覚センサー、および把持装置
【課題】小型化が可能で、かつ剪断力および押圧力を正確に検出可能な応力検出素子、触覚センサー、および把持装置を提供する。
【解決手段】応力検出素子200は、矩形状の開口部111を有するセンサー基板11と、センサー基板11上に形成されて開口部111を閉塞する可撓性を有する支持膜14と、センサー平面視において、開口部111の一辺に沿い、開口部111の内側および外側に跨って設けられ、湾曲することで電気信号を出力する剪断力検出用圧電体210と、センサー平面視において、開口部111の内側で、剪断力検出用圧電体210から離れた位置に設けられ、湾曲することで電気信号を出力する押圧力検出用圧電体310と、支持膜14を覆う弾性膜15と、を具備した。
(もっと読む)
ロボットの把持装置
【課題】ロボットの組立作業において、ワークの把持動作を確実に行う。
【解決手段】把持部材2a、2bの間にワークWを把持する工程において、各把持部材2a、2bに設けられた接触押圧部21a、21bがワークWを押圧して把持することによって発生する光学縞を検出して、把持力の制御を行う。このとき、把持部材2aに設けられたワーク有無検出部22aがワークWに接触することによって発生する光学縞を検出することで、把持部材2a、2bの間にシート状のワークWが有ることを確認する。
(もっと読む)
ロボット制御システム
【課題】検査員や新たなセンサを設けることなく、ハンドと部品間の滑りを検出する。
【解決手段】挿入量算出部112と挿入速度算出部113と挿入力算出部114と仕事量算出部115と領域判定部116を備え、挿入量算出部112はロボットの各軸エンコーダ信号から接触後のハンドの移動量を挿入量として算出し、挿入速度算出部113は挿入量を時間微分して挿入速度を算出し、挿入力算出部114はロボットの手首部に設けた力センサ信号をもとに被嵌合部品に加わる挿入力を算出し、仕事量算出部115は挿入速度と挿入力の積を時間積分して挿入作業中の仕事量を算出し、領域判定部116は挿入量と仕事量の軌跡が予め設定した閉領域の外側に出た場合に滑りが発生したと判断する。
(もっと読む)
ロボットハンド
【課題】付加ビジョンセンサが不要でコンパクトであり、暗闇の中でもすべりによる落下することなく、把持することができるロボットハンドを提供する。
【解決手段】指部を屈曲させることで物体を把持するロボットハンドであって、手掌部または指部に設けられた接触検出手段と、検出結果に応じて駆動部を制御する手段を有し、検出手段は、物体に光を照射する光源と、物体の光が照射された部位の画像情報を取り込むべく光を集光するレンズを具備したイメージセンサと、上記レンズの焦点を変化させるレンズ移動機構と、取り込んだ画像情報の差分に基づいて、物体の相対的な移動量を演算する演算手段と、を有し、レンズの焦点と物体の位置との一致・不一致を判断して手掌部または指部と物体との接触を検出するとともに物体の外形形状を検出し、かつ、物体表面の相対的な移動量を演算する手段と、を有して構成する。
(もっと読む)
複数の物体間の相対移動を検出する方法
【課題】複数の物体間に相対移動が生じた場合に、相対移動を検出するためのセンサ等を用いることなく、画像処理により複数の物体間の相対移動を早期に検出することができる方法を提供する
【解決手段】ロボットハンド1は、CCDカメラ5により把持部4及び把持部4に把持されている物体9を含む部分画像Pを取得し、その部分画像Pから把持部4及び物体9をそれぞれ認識する。その後、認識された把持部4及び物体9の動きベクトルhi,wjをそれぞれ算出し、算出された動きベクトルhi,wjに基づいて、把持部4と物体9との間の滑り(相対移動)を検出する。これにより、把持部4と物体9との間に滑りが生じた場合に、滑りを検出するためのセンサ等を用いることなく、画像処理により把持部4と物体9との間の滑りを早期に検出することができる。
(もっと読む)
多指ハンドおよびロボット並びに多指ハンドの把持方法
【課題】物体の形状に影響されることなく物体を傷付けることなく最適な力で把持できるようにした多指ハンドおよびロボット並びに多指ハンドの把持方法を提供する。
【解決手段】物体を把持する多指ハンドであり、指部に設けられた物体との相対位置を検出した検出結果に応じて駆動部を制御する制御手段と、指先と物体との接触状態を調整する手段とを備え、指部の先端部に設けた少なくとも2つの感圧素子を設け、すべり量検出手段として、光源と、画像情報を取り込むイメージセンサと、イメージセンサの画像情報の差分に基づいて多指ハンドに対する物体の相対的な移動量を演算する演算手段とを具備する。
(もっと読む)
把持部を有するロボットハンドシステム
【課題】把持部を有するロボットハンドシステムにおいて、センサを複数必要とせずに、最小限の把持力で対象物を把持することを可能とすることである。
【解決手段】ロボットハンドシステム10のハードウェアの部分は、1つの昇降アクチュエータ12と、複数の把持アクチュエータ14と、複数の多関節部17の各先端の把持端部にそれぞれ設けられる探触子20を含んで構成される。探触子20に接続される接触・滑り度検出部50は、探触子20に対象物が全く接触していない非接触状態と、探触子20と対象物が相対的に移動していない接触把持状態と、探触子20と対象物が相対的に移動していわゆる滑っている滑り状態とを区別して検出する機能を有する。この機能を用いて、制御部70は、最小限の把持力で対象物を把持するように、把持アクチュエータ14を駆動する。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】ロボットハンド装置において、薄膜物体を把持しているか否かを精度よく検出できるようにする。
【解決手段】ロボットハンド装置の指先の法線方向とせん断方向の各力を検出し、検出された各力を用いて摩擦係数を演算する。あらかじめ指先同士の最大摩擦係数から閾値を求めておき、閾値と演算された最大摩擦係数とを比較して、最大摩擦係数が閾値の範囲内であるか否かを検出する。これにより、薄膜物体が指先に把持されているかどうかを検出する。
(もっと読む)
ロボットハンド機構、ロボットハンド機構を備えたロボット及びロボットハンド機構の制御方法
【課題】不特定の硬さを有する対象物に対して、その硬さに応じた最適な把持力及び速度での移動制御を行なうことを実現したロボットハンド機構を提供することを目的とする。
【解決手段】ロボットハンド機構1は1対の指部2a及び2bを備えている。指部2a及び2bの第一節21には、サーボモータ7を介して第二節22が変位可能に連結されている。サーボモータ7にはポテンショメータ8が取り付けられており、第二節22の先端部には力覚センサ9が設けられている。ポテンショメータ8は、第二節22の変位量を制御部6に出力する。力覚センサ9は、第二節22が対象物Oに加える押圧力Fx及び第二節22と対象物Oとの間に生じる摩擦力Fyを制御部6に出力する。制御部6は、ポテンショメータ8及び力覚センサ9からの入力に基づいて対象物Oの硬さを判定し、硬さに基づいて、対象物Oを把持する把持力と対象物Oを移動させる速度とを切り替える。
(もっと読む)
ロボットハンド
【課題】把持する物体に適した把持力を決定することができるロボットハンドを提供する。
【解決手段】アクチュエータを駆動させて少なくとも2つの指部で載置されている物体を把持し、これらの指部により物体の把持力Gを徐々に大きくしつつこれらの指部を上昇させて物体の表面に対して指部を滑らせ、指部に物体の表面に沿った方向に作用する荷重Fを荷重検出手段で検出し、検出された荷重Fが一定になったときの把持力G1を、物体を持ち上げる際に必要な把持力として決定する。一定になった荷重Fの値F1から物体に作用する重力Wが検出され、把持力Gと荷重Fの値から物体と指部との間の動摩擦係数が検出される。
(もっと読む)
ロボット用マニピュレータ
【課題】表面構造を部位によって最適化したロボット用マニピュレータを提供することを課題とする。
【解決手段】ロボット用マニピュレータ1であって、構造部2の表面側に設けられる圧力センサからなるセンサ部3と、少なくともセンサ部3を覆う被覆材からなる被覆部4とを備え、被覆部4は、指先からの距離に応じて厚さ及び/又は硬さの異なった被覆材4a,4b,4c,4eが配置されることを特徴とし、また、センサ部3は、指先からの距離に応じて分解能が異なった圧力センサが配置されることを特徴とする。
(もっと読む)
制御装置および方法、プログラム並びに記録媒体
【課題】物体を滑らせずに、最小限度の把持力で把持できるようにする。
【解決手段】圧力センサ457が、物体の滑りを検出して、滑り検出値を出力し、変化値演算部462が、滑り検出値に基づいて、物体の把持力を設定する指令値を、物体を静止する大きさにする変化値を演算し、抑制値演算部460が、滑り検出値に基づいて、指令値を、物体を静止する必要最小限度の大きさにする抑制値を演算し、加算部451,452が、変化値と抑制値に基づいて、指令値の大きさを設定する。
(もっと読む)
検出装置および方法、プログラム、並びに記録媒体
【課題】物体の落下の速度に拘わらず物体の落下を確実に抑制することができるようにする。
【解決手段】複数のセンサエレメント52で構成される圧力センサを備える検出装置において、センサエレメント52により検出された圧力値を用いて、圧力中心演算部122により圧力中心位置を演算する。圧力中心速度演算部123は、圧力中心演算部122により演算された圧力中心位置の時間変化を用いて、圧力中心位置の速度を演算する。滑り検出部124は、圧力中心速度演算部123により演算された圧力中心速度に基づいて、滑りを検出する。
(もっと読む)
ロボットハンド及び制御方法、並びにプログラム
【課題】滑り覚のセンサを利用するロボットハンドにおいて、例えば3本の指機構で物体を把持した後、2本の指機構に持ち替えるなどの動作を行うことができるようにする。
【解決手段】拇指11は、拇指11の位置を、軸J1.1と軸J1.2を中心に中指12及び示指13に対して対向して移動(即ち旋回)させることができるとともに、指先部分を、中指12及び示指13に対向する側又はその反対側に曲げることができるようになされている。中指12及び示指13は、その指先部分を、拇指11に対向する側又はその反対側に曲げることができるとともに、中指12全体を示指13が位置する側又はその反対側に傾けることができるようになされている。本発明は、ロボットハンドマニピュレータに適用できる。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】ロボットハンドやマニピュレータにおける任意物体把持や操りを正確に行ったり、または人とより親和性の高い物理的インタラクションをとることができるようにする。
【解決手段】圧力中心演算部122は、圧力検出部42からの分布圧力値を用いて、圧力中心位置を演算する。圧力中心移動演算部123は、圧力中心演算部122からの圧力中心位置を用いて、圧力中心の移動量を演算する。滑り覚検出部124は、圧力中心移動演算部123からの圧力中心移動演算値に、圧力中心移動演算値の大きさに応じた係数を乗算することで、圧力中心移動検出演算を行う。そして、滑り覚検出部124は、圧力中心移動検出演算の演算結果により、滑りを検出する。本発明は、任意物体を把持して操ったり、移動させる動作を行うロボットハンドマニピュレータに適用できる。
(もっと読む)
脚式移動型ロボット
【課題】床面までの距離を正確に測定することができる脚式移動型ロボットを提供すること。
【解決手段】本発明の一態様にかかる脚式移動型ロボットは、脚部によって床面を移動する脚式移動型ロボットであって、脚部10に設けられた足平本体部40と、足平本体部40に対して摺動可能に取り付けられ、足平本体部40の底面よりも床面側に突出する可動部51と、可動部51の摺動位置を検出する変位センサ57と、可動部51が足平本体部40の足裏面40aに近づく方向の摺動端において、可動部51の下端が足平本体部40よりも床面側に突出するよう、可動部51の摺動範囲を規制する係止部59と、を備えるものである。
(もっと読む)
1 - 20 / 31
[ Back to top ]