
Fターム[3C007LV22]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | 流体駆動に特有の制御 (35)
Fターム[3C007LV22]に分類される特許
1 - 20 / 35
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
作業補助装置

【課題】従来に比して、製造ラインでのレイアウト性及び生産効率を向上できる作業補助装置を提供すること。
【解決手段】ワークWを保持するアタッチメント5を有し、作業者Sが付加する操作力に基づいてワークWを搬送するアーム3と、アーム3を駆動させるエアシリンダ21と、エアシリンダ21に出力するエアの圧力を調整する電空レギュレータと、電空レギュレータと通信可能に設けられて、電空レギュレータの出力エア圧を制御する制御装置7と、を備えることを特徴とする作業補助装置1である。
(もっと読む)
足底機構
【課題】斜面歩行を支援する足底機構を提供する。
【解決手段】足底機構10は、一対の袋体26a、26bと、ソール板14と、流路24と、バルブ22を備える、一対の袋体は、足底の前後に配置されており、膨張収縮が可能である。ソール板14は、一対の袋体の下側に取り付けられており、袋体の膨張収縮に応じて傾きが変化する。流路24は、一対の袋体を連通する。バルブ22は、流路を開閉する。バルブ22は、足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合には開いており、荷重が荷重閾値を超えた場合に閉じる。バルブ22が開いている間に流体の移動によってソール板14が斜面に合わせて傾斜し、バルブ22が閉じるとソール板14の傾斜が固定される。ソール板14が固定されると、ユーザの足裏を水平に保ち易くなる。
(もっと読む)
双腕作業機械
【課題】作業の安全を確保しつつ、作業フロント同士を干渉危険領域まで接近させた状態で作業を行うことを可能とする双腕作業機械を提供する。
【解決手段】干渉負荷軽減装置200Aは、電磁切換弁50とリリーフ弁52とを備える。電磁切換弁50は、スイング用油圧シリンダ91のボトム油室91aに接続され、通常、リリーフ弁52を遮断している。スイング用油圧シリンダ91により駆動される作業フロントが干渉危険領域に達すると、電磁切換弁が位置dに切り換わり、スイング用油圧シリンダ71とリリーフ弁52が連通する。リリーフ弁52は、予め設定された圧力以上となると圧油を作動油タンク32に解放する。
(もっと読む)
電動アクチュエーター
【課題】電動アクチュエーターの握力トルクを高めることを目的とする。
【解決手段】電動アクチュエーターであって、回転運動をする電動駆動部200と、前記電動駆動部に接続される直進運動機構であって、前記電動駆動部と接続される第1のネジ部230と、前記第1のネジ部と嵌合する第2のネジ部240を有し、前記第1のネジ部に加えられる回転運動を前記第2のネジ部の直線運動に変換する直進運動機構と、屈曲可能な屈曲機構(101〜104、111〜113)と、前記屈曲機構と前記第2のネジ部とを連結し、前記第2のネジ部の直線運動に基づいて前記屈曲機構を屈曲させる連結部材130と、を備える。
(もっと読む)
形状記憶ポリマーを用いたアクチュエータおよびその制御方法
【課題】安定して強い力により2つの部材の関節角度を一定の状態に保持することができるアクチュエータおよびその制御方法を提供する。
【解決手段】ゴムチューブ83の両端は、第一,第二固定部材81,82にそれぞれ取り付けられる。ゴムチューブ83が径方向へ膨張変形すると、動力変換部材86により第一固定部材81と第二固定部材82の離間距離を短くする力を発生する。さらに、ゴム状態とガラス状態に変化する形状記憶ポリマー87が、ゴムチューブ83の内周側、動力変換部材86の外周側、および、ゴムチューブ83と動力変換部材86の中間層の少なくとも何れか一つに配置される。形状記憶ポリマー87をゴム状態にして、ゴムチューブ83の筒内部への供給流体圧力を制御して、第一,第二部材10,20の回転角度を変更する。形状記憶ポリマー87をガラス状態にして、第一,第二部材10,20の回転角度を保持する。
(もっと読む)
液圧駆動のアクチュエータ、それを組み込んだ液圧駆動のアクチュエータユニット、およびそれらを組み上げた液圧駆動のロボット
【課題】 周囲の状況に応じた“柔軟な制御”“柔軟な動作”を行うことができ、 “直線状の動き”と“曲線状の動き”も可能とした2面性を同時に兼ね備えた液圧駆動のアクチュエータやそれらを組み上げたロボットを提供する。
【解決手段】 シリンダ室内に液媒体が充填される第1のシリンダ体10と第2のシリンダ体20と、液媒体が充填される中空部31を備えたピストン体30と、第1のシリンダ体10とピストン体30と第2のシリンダ体20により形成される液媒体空間内に液圧を供給する液圧供給機構40を備えた液圧駆動のアクチュエータである。ピストン体30は可撓性を有した曲がる素材でできており、アクチュエータ100全体として曲がりながらシリンダ−ピストン駆動により伸縮することができる。なお、伸長を制御する間隔リミッタ50と弾性体60も備えた構造とすることが好ましい。
(もっと読む)
駆動装置
【課題】特性が異なる2つのアクチュエータを組み合わせたハイブリッド型の駆動装置を提供する。
【解決手段】駆動装置は、直線運動を生成するエアシリンダと、エアシリンダの駆動を制御するエアシリンダ制御部と、エアシリンダで生成される直線運動に基づいて直線動作する第1作用部と、回転運動を生成する電気モータと、電気モータに連結されたウォームとウォームにかみ合うウォームホイールからなるセルフロック機能の無いウォーム機構又はセルフロック機能の有るウォーム機構を含む変換部と、電気モータの駆動を制御する電気モータ制御部と、第1作用部に連結されるか又は係合可能であり、変換部で生成される直線運動に基づいて直線動作する第2作用部を備えており、エアシリンダ制御部はエアシリンダを駆動して第1作用部に一定の推力を加え、電気モータ制御部は電気モータを駆動し、第2作用部を介して第1作用部に、推力と第1作用部に加わる外力との合力の作用方向とは逆方向に規制力を加えながら、第1作用部の動作速度と位置を制御する。
(もっと読む)
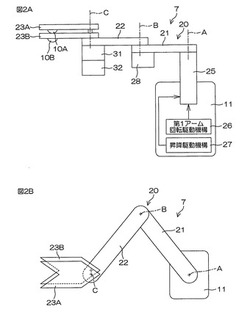
回動装置、回動制御システム、及び回動装置への流体供給制御方法
【課題】流体圧式のアクチュエータの牽引で回動する回動部材に対して、複数種の回動パターンを可能にすると共に、回動力の増大を図る。
【解決手段】回動装置1は、回動部材6を回動可能に連結したベース部材2に第一アクチュエータ10及び第二アクチュエータ20を配置し、両アクチュエータ10、20の牽引による回動部材6の回動方向を同方向にしている。流体の供給は、第一アクチュエータ10へ供給してから第二アクチュエータ20へ供給する方式、両アクチュエータ10、20へ同時的に供給する方式、又は第二アクチュエータ20へ供給してから第一アクチュエータ10へ供給する方式の切替が可能であり、それにより、回動部材6の複数種の回動パターンを得ると共に、両アクチュエータ10、20を作動させた状態では回動力を増大できる。
(もっと読む)
流体圧伝達装置
【課題】小型化及び軽量化を図ることができる流体圧伝達装置を提供する。
【解決手段】流体圧伝達装置は、高圧駆動流体圧シリンダ55,56と、低圧駆動流体圧シリンダ51〜54と、複数の従動流体圧シリンダ41〜46と、駆動流体圧シリンダ51〜56に接続された駆動側流体圧伝達路Lm1〜Lm6と、従動流体圧シリンダ41〜46に接続された複数の従動側流体圧伝達路Ls1〜Ls6とを備える。各駆動側流体圧伝達路Lm1〜Lm6は、開閉弁V11〜V66を介して全ての従動側流体圧伝達路Ls1〜Ls6と接続されている。
(もっと読む)
流体圧伝達装置
【課題】小型化及び軽量化を図ることができる流体圧伝達装置を提供する。
【解決手段】流体圧伝達装置は、高圧駆動流体圧シリンダ75と、複数の低圧駆動流体圧シリンダ71〜74と、各低圧駆動流体圧シリンダ71〜74に低圧側流体圧伝達路61〜64を介して夫々接続される複数の流動流体圧シリンダ51〜54と、高圧駆動流体圧シリンダ75に接続される高圧側流体圧伝達路65とを備える。高圧側流体圧伝達路65は、各低圧側流体圧伝達路61〜64に流路切換弁91〜94を介して接続される。各流路切換弁91〜94は、低圧駆動流体圧シリンダ71〜74と従動流体圧シリンダ51〜54とを接続させる低圧路状態と、高圧駆動流体圧シリンダ75と従動流体圧シリンダ51〜54とを接続させる高圧路状態とに切換自在に構成される。
(もっと読む)
ハンド装置
【課題】指機構の屈伸動作を高精度に制御することができるハンド装置を提供する。
【解決手段】ハンド本体に内蔵されて指機構6を屈伸作動させる従動流体圧シリンダ23と、ハンド本体の外部にあって従動流体圧シリンダ23に流体圧伝達管45を介して接続され、従動流体圧シリンダ23に作動用流体圧を付与する駆動流体圧シリンダ36と、駆動流体圧シリンダ36から流体圧伝達管45に出力される出力流体圧を測定する第1の圧力センサ48と、従動流体圧シリンダ23に流体圧伝達管45から入力された入力流体圧を測定する第2の圧力センサ49と、第1及び第2の圧力センサ48,49による測定結果に基づいて指機構の屈伸を制御する制御手段36とを設ける。
(もっと読む)
加工ロボットシステム
【課題】流体圧シリンダ装置を介して加工工具とワークとを押し付けながら加工を行う加工ロボットシステムにおいて、過負荷を防止するとともに加工の品質及び信頼性を向上させる。
【解決手段】加工ロボットシステム102は、ロボット手先部16に支持された加工工具92に加わる力及びモーメントを検出する力覚センサ90と、所定の制御パラメータに従ってロボット14及び流体圧シリンダ装置22を制御するシステム制御装置100とを備える。システム制御装置は、力覚センサの検出データに基づいて、倣い作業中に加工工具とワークとの間に作用している作用力を算出し、作用力に応じて手先部の目標軌道、目標移動速度及び流体圧シリンダ装置の目標押圧力を調整する。また、流体圧シリンダ装置が変位させる物体に作用する重力及び慣性力が流体圧シリンダ装置に及ぼしているシリンダ影響力を算出し、シリンダ影響力を補償するように目標押圧力を調整する。
(もっと読む)
マニピュレータの関節の変位量検出機構
【課題】マニピュレータの径を大きくすることなく関節の近傍で関節の変位量を正確に検出すること。
【解決手段】動力伝達用ワイヤ21aに対して関節4の近傍で連結され、動力伝達用ワイヤ21aの移動量を伝達する変位センシング用ワイヤ30と、この変位センシング用ワイヤ30の移動をガイドするセンシング用ワイヤガイド部32と、医療用のマニピュレータ1の基端側で変位センシング用ワイヤ30の移動量を検出する磁気センサ40と、関節4を保持する関節保持部11と、磁気センサ40を保持するセンサ保持部14と、関節保持部11に設けられ、ガイド部の一端側を固定する関節保持部側ガイド固定部12と、センサ保持部14に設けられ、センシング用ワイヤガイド部32の他端側を固定するセンサ保持部側ガイド固定部14aとを備えた。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
ゴム人工筋アクチュエータ
【課題】本発明の目的は、高精度な制御が要求される細径の医療用または工業用マニピュレータを実現するためのゴム人工筋アクチュエータを提供することにある。
【解決手段】本発明は、ゴム人工筋アクチュエータ内部に抵抗体を備え、可動端子が前記抵抗体との接触を維持しながら前記抵抗体上を移動することにより、前記ゴム人工筋アクチュエータの変位を検出することができることを特徴とする、ゴム人工筋アクチュエータを提供する。
(もっと読む)
真空発生システム
【課題】真空発生器を動作させるのに用いた圧縮空気の有効利用を図る。
【解決手段】真空発生システム1において、コンプレッサ11から吐出される圧縮空気により動作する真空発生器13の後段に真空発生器28を設け、真空発生器13と真空発生器28との間にタンク22を設ける。真空発生器13から排出された圧縮空気はタンク22に蓄積される。真空発生器28は、タンク22に蓄積された圧縮空気を用いて動作する。また、経路24により、コンプレッサ11とタンク22とを真空発生器13を介さずに接続する。これにより、コンプレッサ11からタンク22へ圧縮空気を直接的に供給することもでき、真空発生器13が停止している期間でも、真空発生器28を動作させることができる。
(もっと読む)
圧縮性流体圧アクチュエータ及びそれを用いた関節駆動ユニット
【課題】動作効率に優れた圧縮性流体圧アクチュエータ及びそれを用いた関節駆動ユニットを提供する。
【解決手段】ベース部材にユニバーサルジョイント機構で保持され、その機構の中心を含む3つの直交軸中の2つの軸の夫々に対して、夫々、揺動可能な揺動部材と第1及び第2の回転部材と、圧縮性流体を蓄えるタンク部材に圧縮性流体を補充する圧力源と、ベース部材と揺動部材を連結しタンク部材内の圧縮性流体により駆動され揺動部材に対して揺動トルクを発生させる複数の揺動トルク発生機構とタンク部材における圧縮性流体の接続を制御する制御弁装置と、2つの回転部材の相対角度を変化させる揺動角調節手段とを備える。
(もっと読む)
歩行ロボット
【課題】従来から行われるアクチュエータによる能動的歩行だけではなく受動的歩行を積極的に行うことで、歩行ロボットの歩行に要するエネルギーを低減し、効率的な歩行の実現を図る。
【解決手段】歩行ロボットにおいて、その歩行と連動して、所定の閉空間内で制御用空気の動きを制御することで、該歩行ロボットの歩行をアシストする空気回路部を備える。そして、空気回路部は、歩行ロボットの歩行時において脚が立脚状態から遊脚状態に移行する際に、該脚を構成する各リンク部材の各関節部を介して行われる相対位置変化によって、制御用空気を介して該歩行のエネルギーの一部を回収する歩行エネルギー回収部と、歩行ロボットの歩行時において、脚が遊脚状態から立脚状態へ移行する際に、歩行エネルギー回収部によって回収された歩行エネルギーを開放し、該脚の立脚状態への移行をアシストする歩行アシスト部と、を有する。
(もっと読む)
部品把持装置とその方法
【課題】部品を把持したままで、部品の角度や位置を制御でき、且つ迅速な把持力制御が可能であり、部品搭載装置に適用したときには部品認識から部品搭載までを迅速に行う。
【解決手段】部品102を把持する把持手段150と該把持手段150を制御する制御手段180とを有する部品把持装置において、前記把持手段150が、前記部品102を把持するための3つ以上の把持爪172、174、176と、該把持爪172、174、176を駆動する互いに独立した駆動源154、156、158とを備え、且つ、前記制御手段180が、前記把持手段150を制御するための外乱オブザーバ200と、軸ねじれ反力推定オブザーバ202とを備え、前記制御手段180から前記駆動源154、156、158への制御指令により前記把持手段150が共振比制御される。
(もっと読む)
1 - 20 / 35
[ Back to top ]